
全自动晶圆分选机旋转取料结构.pdf

是你****芹呀

1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
全自动晶圆分选机旋转取料结构.pdf
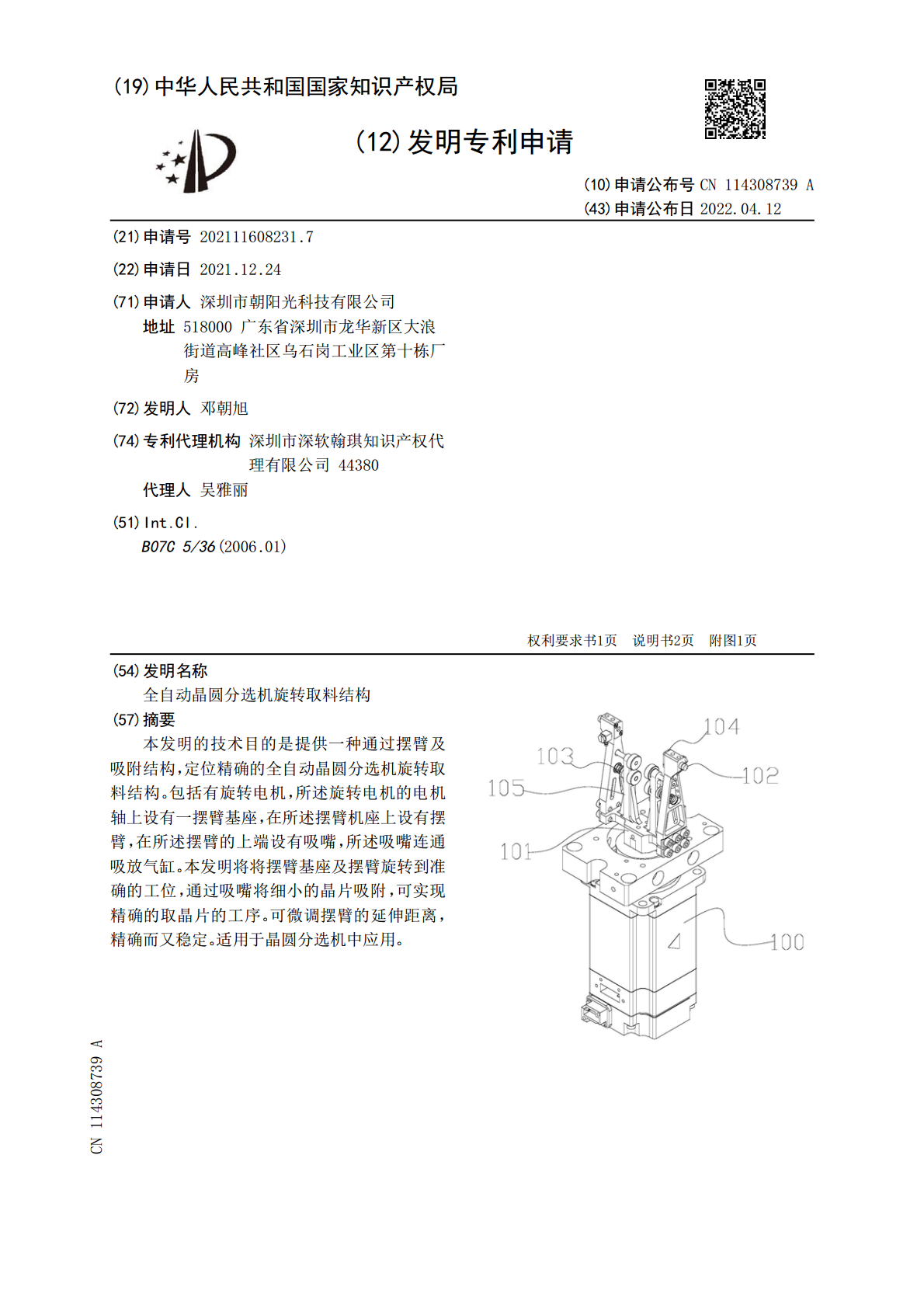
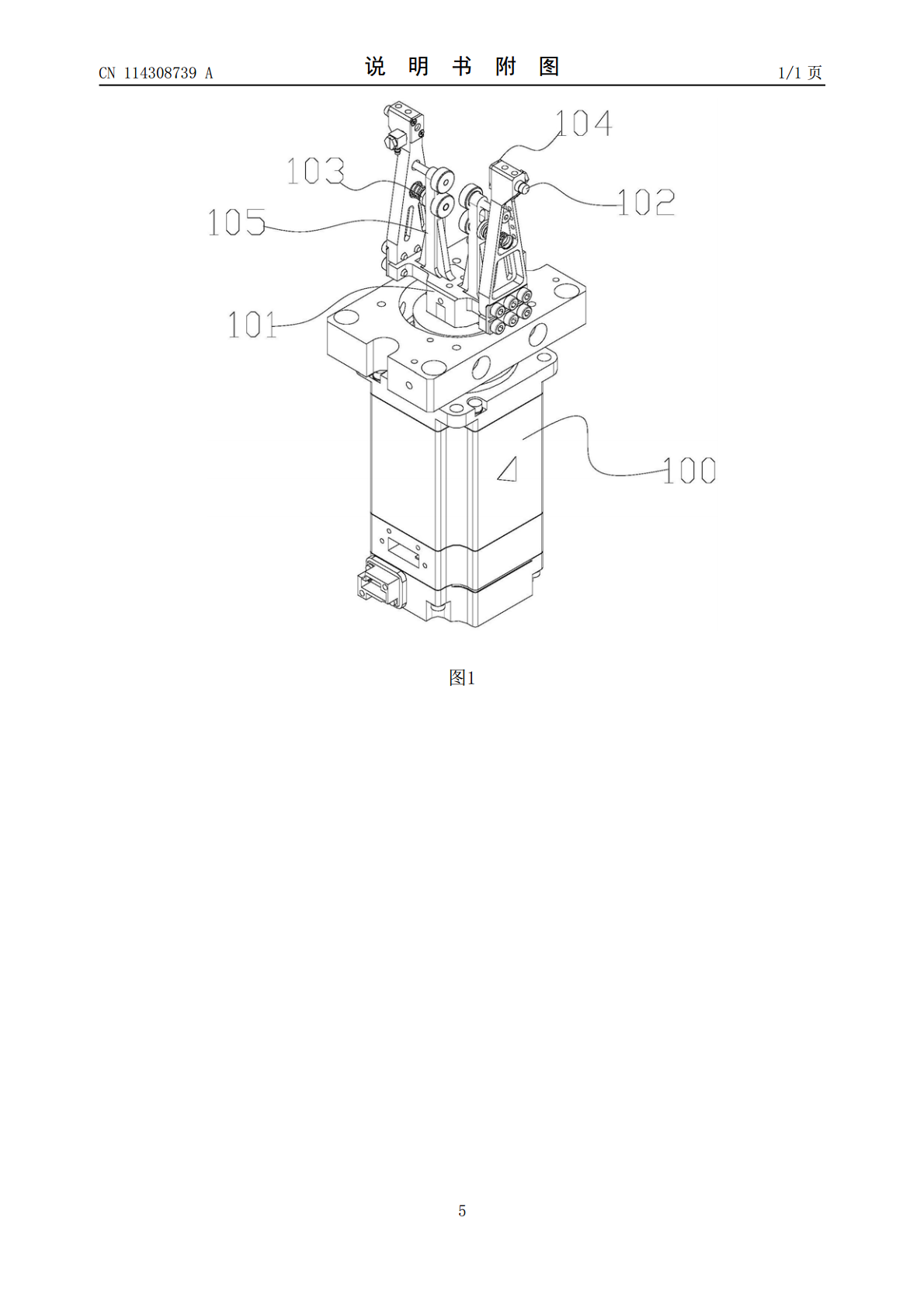
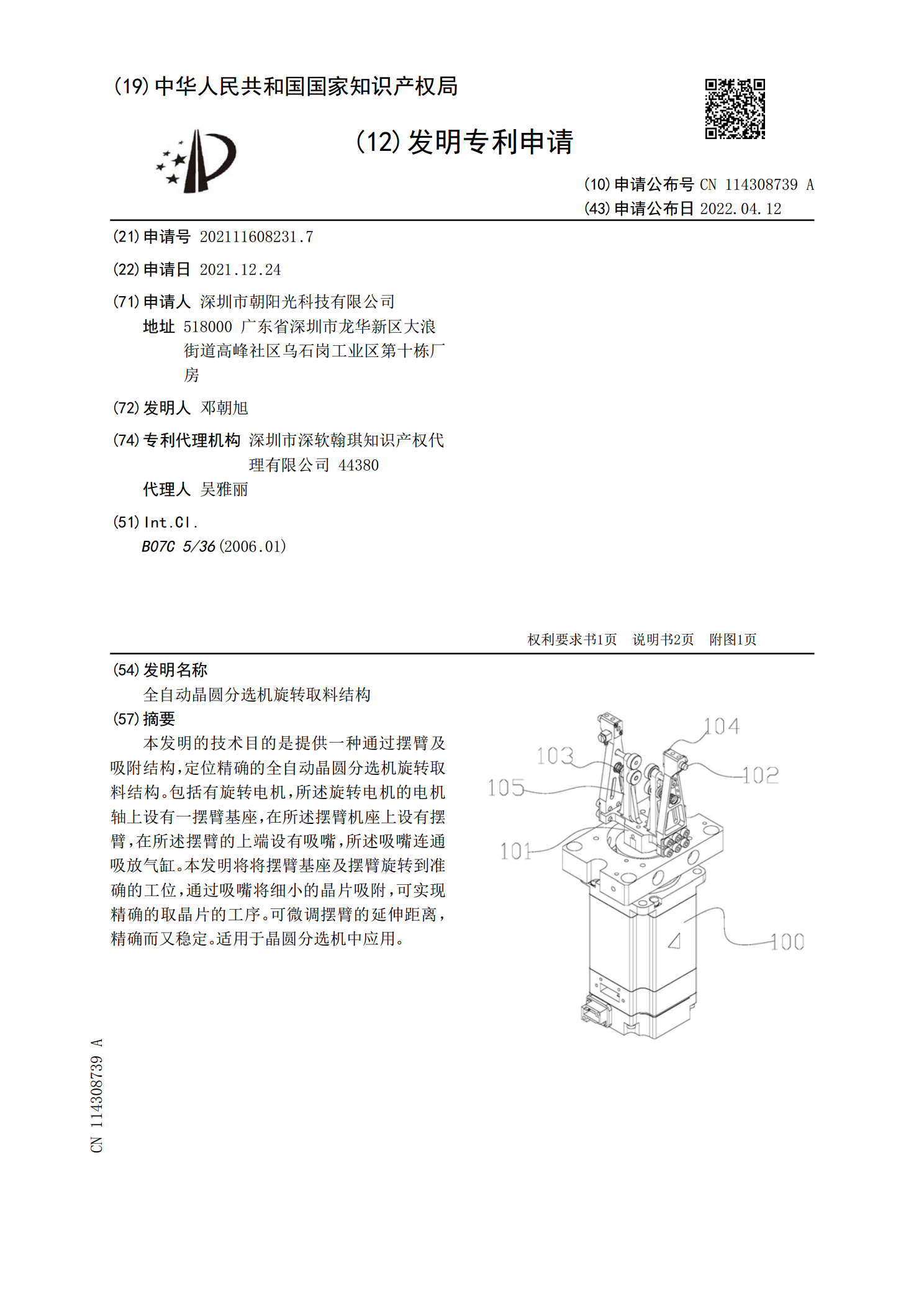
本发明的技术目的是提供一种通过摆臂及吸附结构,定位精确的全自动晶圆分选机旋转取料结构。包括有旋转电机,所述旋转电机的电机轴上设有一摆臂基座,在所述摆臂机座上设有摆臂,在所述摆臂的上端设有吸嘴,所述吸嘴连通吸放气缸。本发明将将摆臂基座及摆臂旋转到准确的工位,通过吸嘴将细小的晶片吸附,可实现精确的取晶片的工序。可微调摆臂的延伸距离,精确而又稳定。适用于晶圆分选机中应用。
晶圆旋转装置.pdf
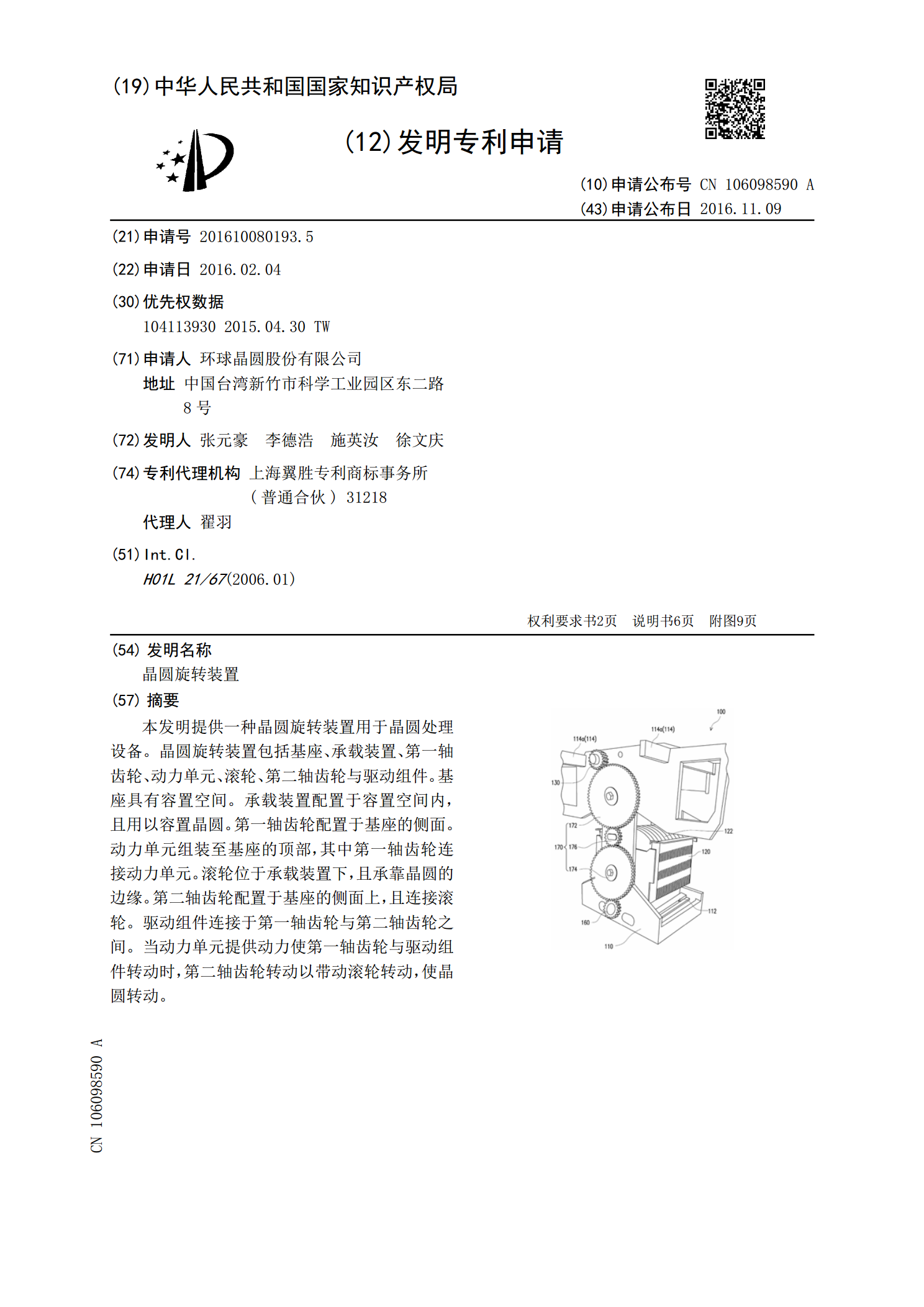
本发明提供一种晶圆旋转装置用于晶圆处理设备。晶圆旋转装置包括基座、承载装置、第一轴齿轮、动力单元、滚轮、第二轴齿轮与驱动组件。基座具有容置空间。承载装置配置于容置空间内,且用以容置晶圆。第一轴齿轮配置于基座的侧面。动力单元组装至基座的顶部,其中第一轴齿轮连接动力单元。滚轮位于承载装置下,且承靠晶圆的边缘。第二轴齿轮配置于基座的侧面上,且连接滚轮。驱动组件连接于第一轴齿轮与第二轴齿轮之间。当动力单元提供动力使第一轴齿轮与驱动组件转动时,第二轴齿轮转动以带动滚轮转动,使晶圆转动。

一种全自动钥匙开牙机取料结构.pdf
本实用新型公开了一种全自动钥匙开牙机取料结构,包括:自动上料机构、夹持翻转结构、夹持移动结构、同步移栽机构,所述自动上料机构固定安装于工作台上,自动上料机构右侧设有夹持移动结构;夹持移动结构由滑动座、升降气缸、夹取气缸、机械爪、升降固定板组成;夹持翻转结构由固定桩、固定底座、转动气缸一、插座组成;同步移栽机构由滑动板安装若干个转动气缸二构成,转动气缸二驱动连接夹取爪。本实用新型通过夹取气缸驱动机械爪将自动上料机构传送来的钥匙夹取,通过升降气缸拉起,再通过滑动座移动至夹持翻转结构上的插孔内,再由转动气缸一驱
旋转分离取料机构及上料装置.pdf
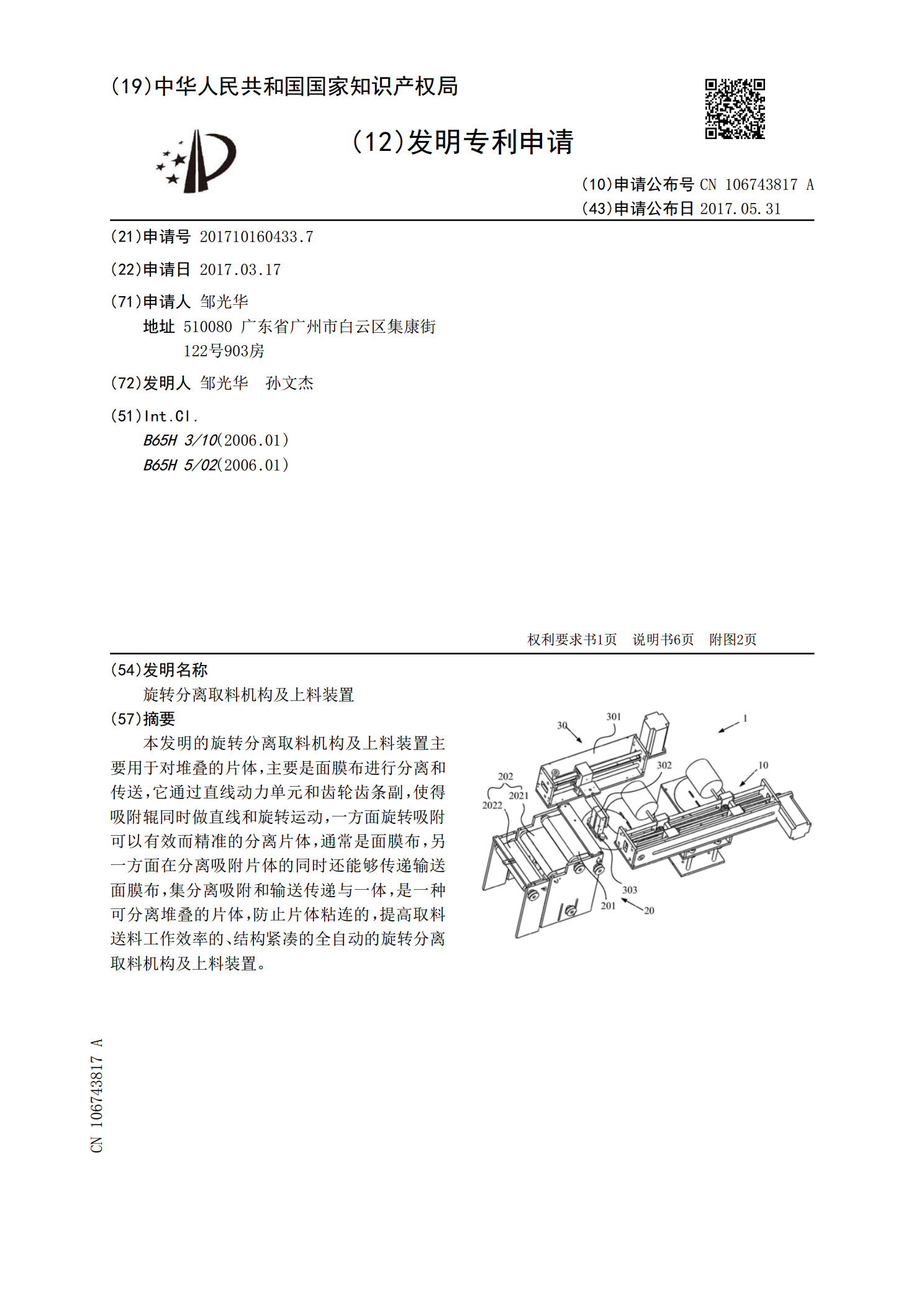
本发明的旋转分离取料机构及上料装置主要用于对堆叠的片体,主要是面膜布进行分离和传送,它通过直线动力单元和齿轮齿条副,使得吸附辊同时做直线和旋转运动,一方面旋转吸附可以有效而精准的分离片体,通常是面膜布,另一方面在分离吸附片体的同时还能够传递输送面膜布,集分离吸附和输送传递与一体,是一种可分离堆叠的片体,防止片体粘连的,提高取料送料工作效率的、结构紧凑的全自动的旋转分离取料机构及上料装置。

晶圆结构的制作方法及晶圆结构.pdf
本申请公开了一种晶圆结构的制作方法及晶圆结构。其中,该制作方法包括以下步骤:提供晶圆,晶圆包括边缘区和中间区;依次形成覆盖晶圆表面的金属阻挡层和负性光刻胶层;对负性光刻胶层进行光刻并对金属阻挡层进行刻蚀,以保留位于边缘区上的负性光刻胶层和金属阻挡层,并在位于中间区上的负性光刻胶层和金属阻挡层中形成开口;在开口中的晶圆中形成金属化物。该制作方法能够避免在晶圆边缘上形成金属化物,进而减少由于金属化物和BEOL器件层之间的粘结力差导致的BEOL器件层发生剥离。同时,该制作方法仅需要改变光刻的工艺过程,从而便于对