
基于目标检测和追踪的车辆横穿道路实线检测方法及系统.pdf

曾琪****是我

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于目标检测和追踪的车辆横穿道路实线检测方法及系统.pdf
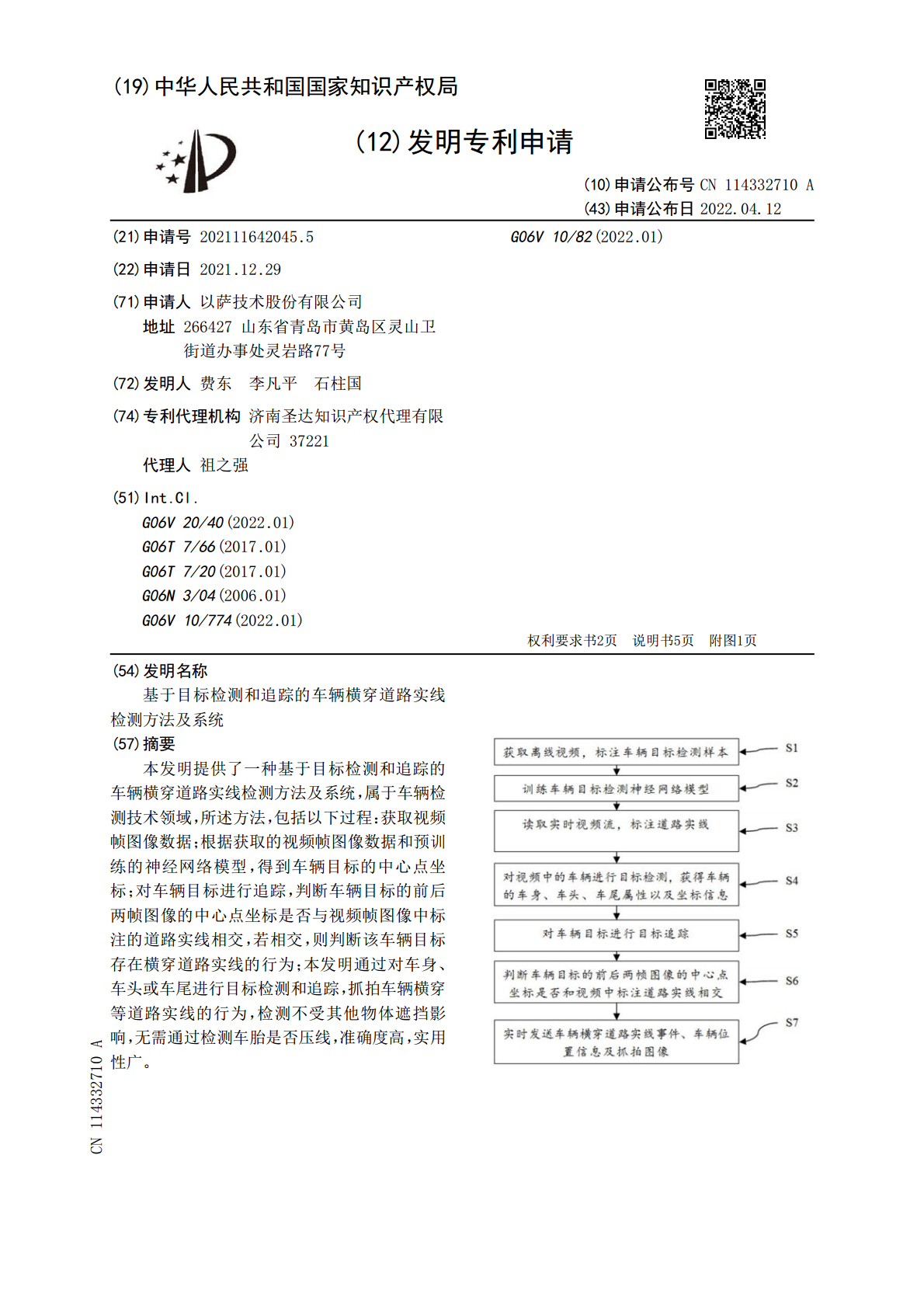
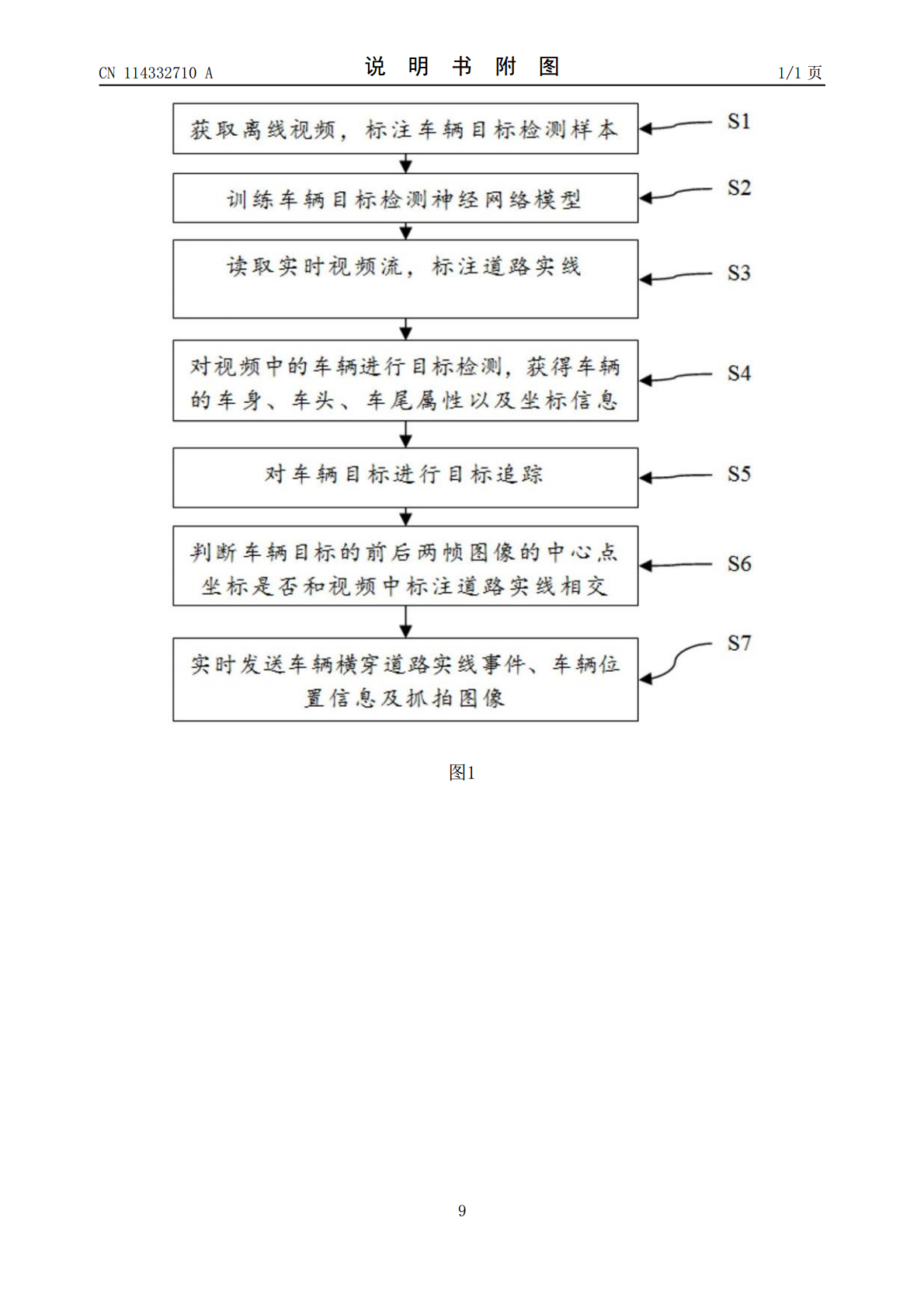
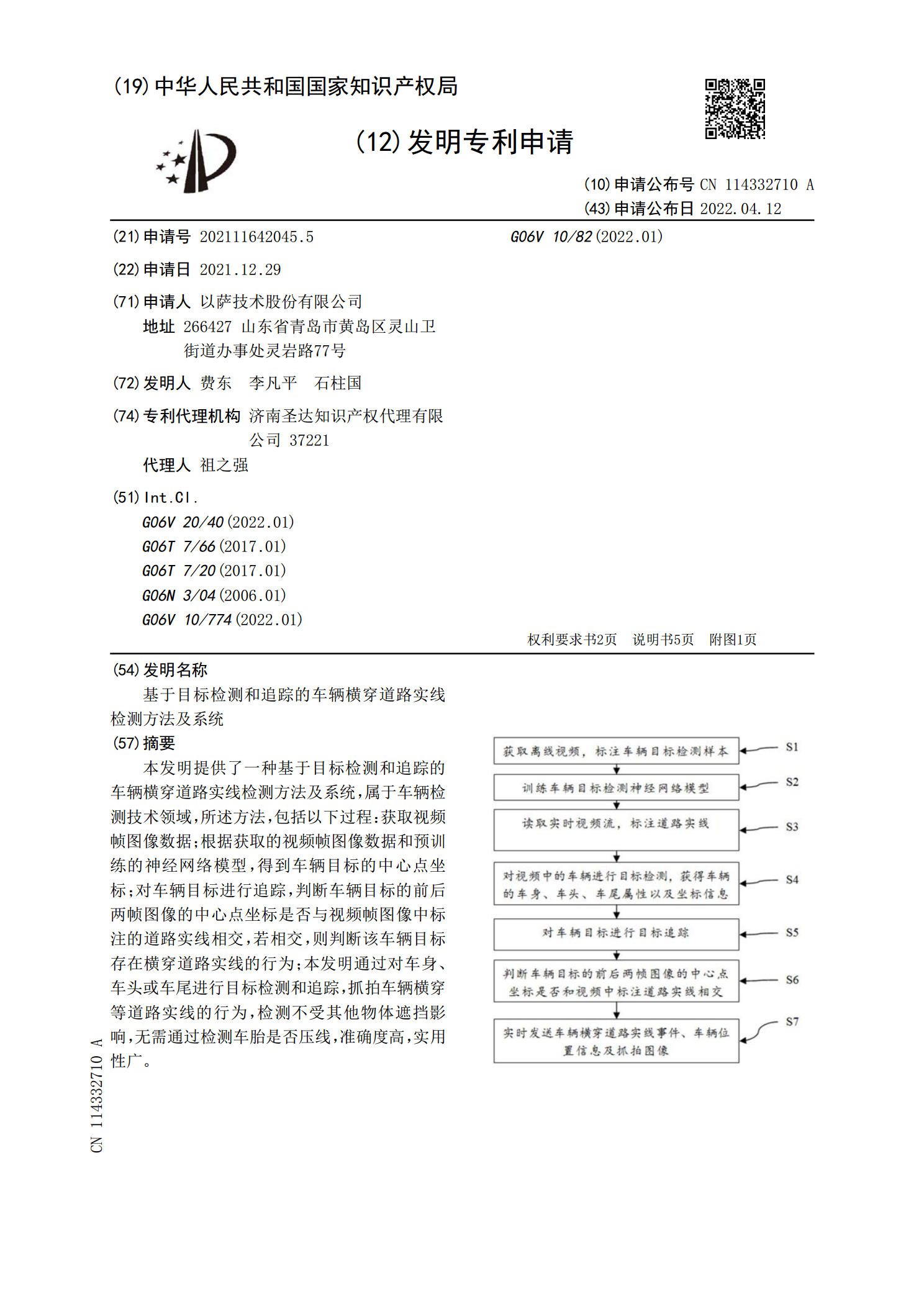
本发明提供了一种基于目标检测和追踪的车辆横穿道路实线检测方法及系统,属于车辆检测技术领域,所述方法,包括以下过程:获取视频帧图像数据;根据获取的视频帧图像数据和预训练的神经网络模型,得到车辆目标的中心点坐标;对车辆目标进行追踪,判断车辆目标的前后两帧图像的中心点坐标是否与视频帧图像中标注的道路实线相交,若相交,则判断该车辆目标存在横穿道路实线的行为;本发明通过对车身、车头或车尾进行目标检测和追踪,抓拍车辆横穿等道路实线的行为,检测不受其他物体遮挡影响,无需通过检测车胎是否压线,准确度高,实用性广。
基于USV的视觉检测和水面目标追踪系统及其检测追踪方法.pdf
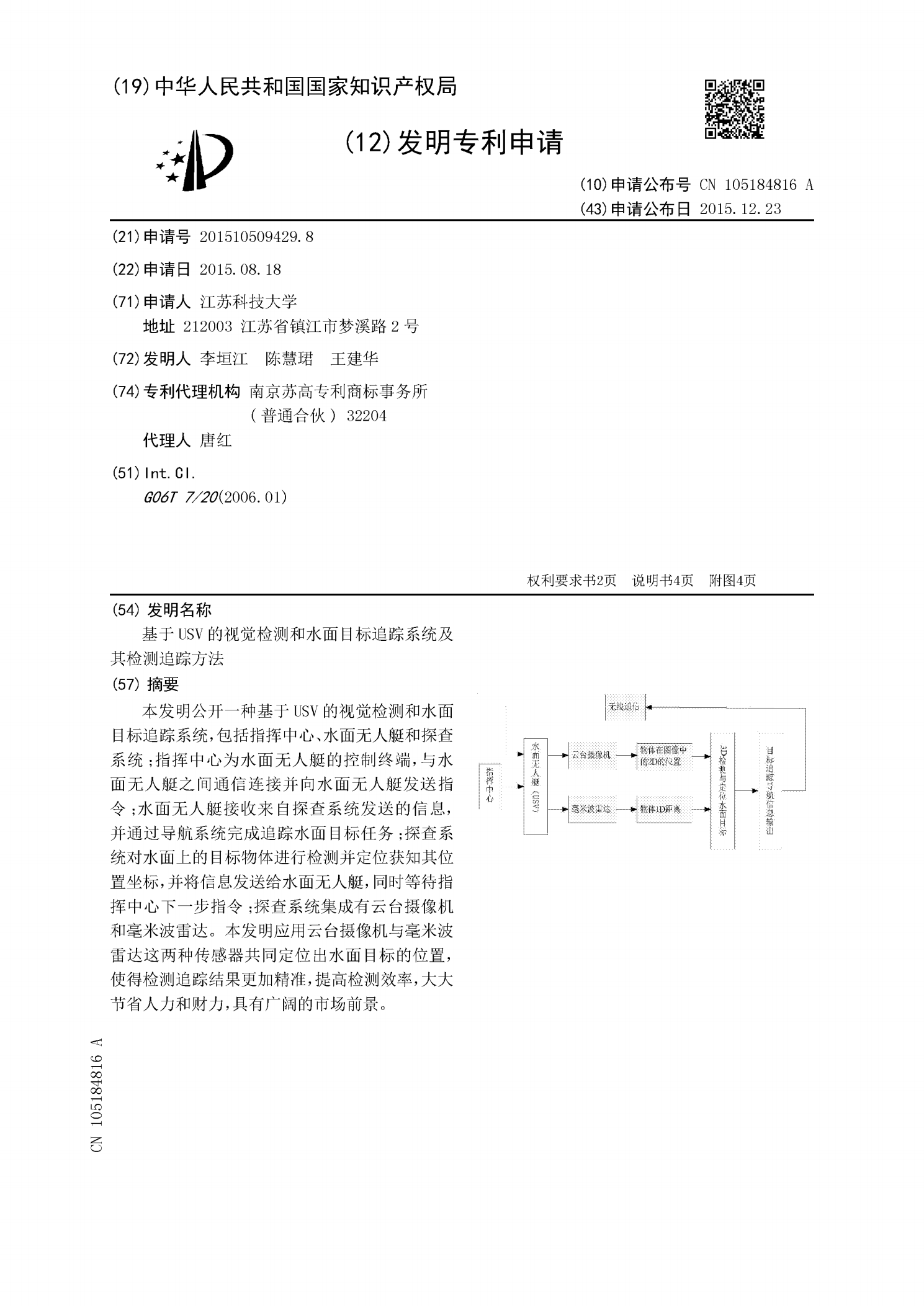
本发明公开一种基于USV的视觉检测和水面目标追踪系统,包括指挥中心、水面无人艇和探查系统;指挥中心为水面无人艇的控制终端,与水面无人艇之间通信连接并向水面无人艇发送指令;水面无人艇接收来自探查系统发送的信息,并通过导航系统完成追踪水面目标任务;探查系统对水面上的目标物体进行检测并定位获知其位置坐标,并将信息发送给水面无人艇,同时等待指挥中心下一步指令;探查系统集成有云台摄像机和毫米波雷达。本发明应用云台摄像机与毫米波雷达这两种传感器共同定位出水面目标的位置,使得检测追踪结果更加精准,提高检测效率,大大节省
基于机器视觉的道路抛洒物检测追踪方法和系统.pdf
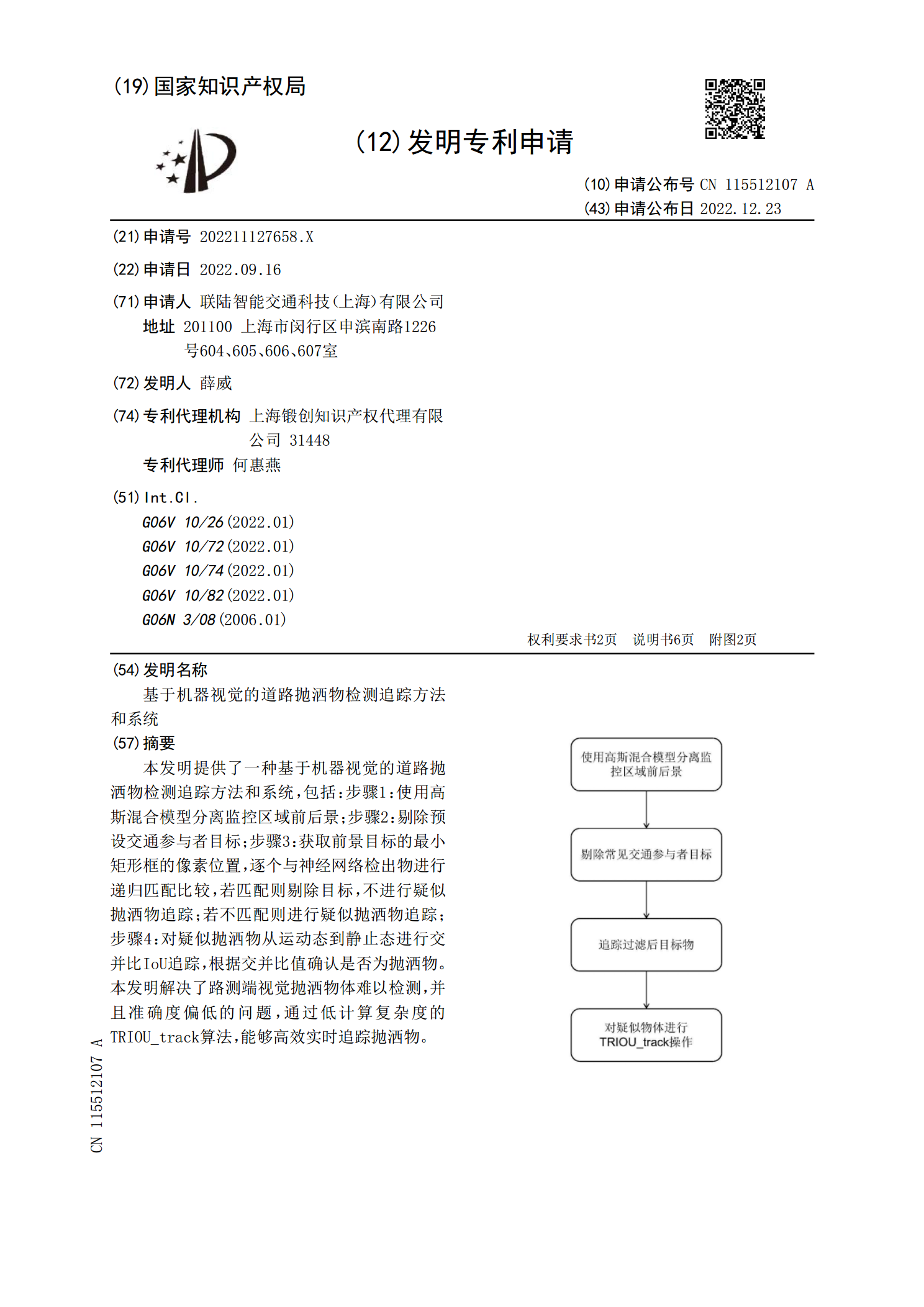
本发明提供了一种基于机器视觉的道路抛洒物检测追踪方法和系统,包括:步骤1:使用高斯混合模型分离监控区域前后景;步骤2:剔除预设交通参与者目标;步骤3:获取前景目标的最小矩形框的像素位置,逐个与神经网络检出物进行递归匹配比较,若匹配则剔除目标,不进行疑似抛洒物追踪;若不匹配则进行疑似抛洒物追踪;步骤4:对疑似抛洒物从运动态到静止态进行交并比IoU追踪,根据交并比值确认是否为抛洒物。本发明解决了路测端视觉抛洒物体难以检测,并且准确度偏低的问题,通过低计算复杂度的TRIOU_track算法,能够高效实时追踪抛洒
基于智能道路边缘计算网关的车辆检测方法和系统.pdf
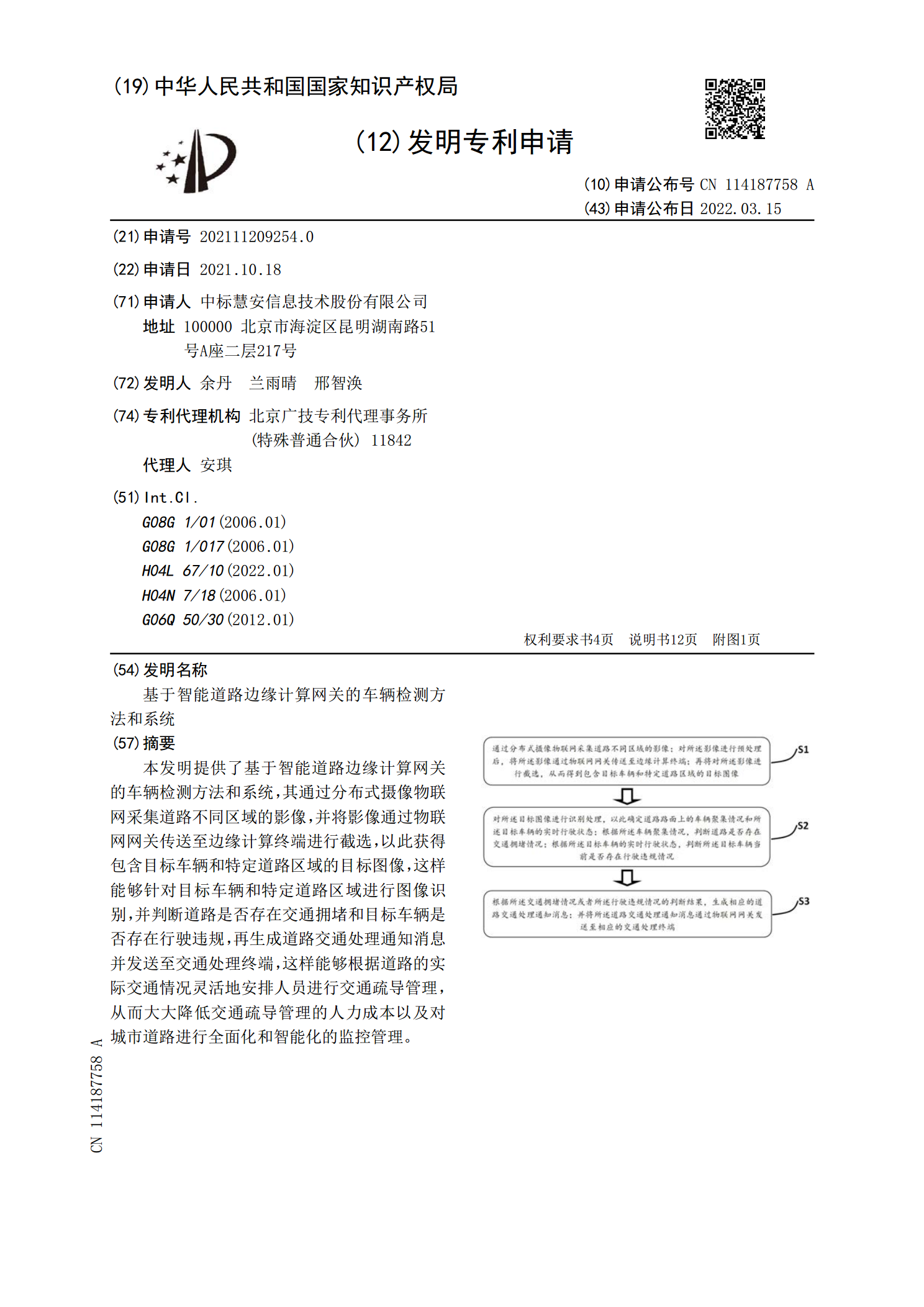
本发明提供了基于智能道路边缘计算网关的车辆检测方法和系统,其通过分布式摄像物联网采集道路不同区域的影像,并将影像通过物联网网关传送至边缘计算终端进行截选,以此获得包含目标车辆和特定道路区域的目标图像,这样能够针对目标车辆和特定道路区域进行图像识别,并判断道路是否存在交通拥堵和目标车辆是否存在行驶违规,再生成道路交通处理通知消息并发送至交通处理终端,这样能够根据道路的实际交通情况灵活地安排人员进行交通疏导管理,从而大大降低交通疏导管理的人力成本以及对城市道路进行全面化和智能化的监控管理。
使用雷达和视觉基于车轮进行的车辆检测和追踪.pdf
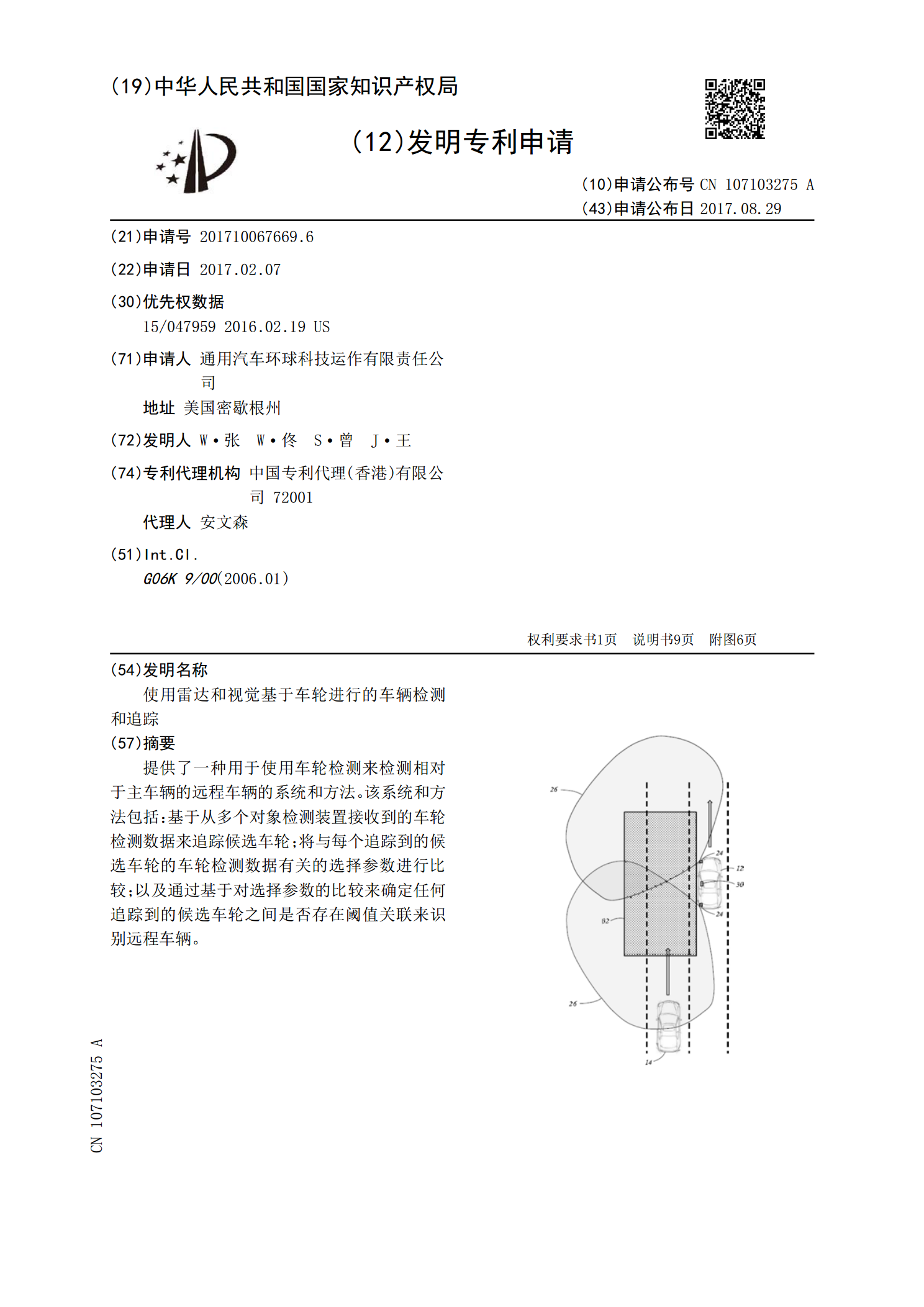
提供了一种用于使用车轮检测来检测相对于主车辆的远程车辆的系统和方法。该系统和方法包括:基于从多个对象检测装置接收到的车轮检测数据来追踪候选车轮;将与每个追踪到的候选车轮的车轮检测数据有关的选择参数进行比较;以及通过基于对选择参数的比较来确定任何追踪到的候选车轮之间是否存在阈值关联来识别远程车辆。