
基于智能道路边缘计算网关的车辆检测方法和系统.pdf

安双****文章

1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于智能道路边缘计算网关的车辆检测方法和系统.pdf
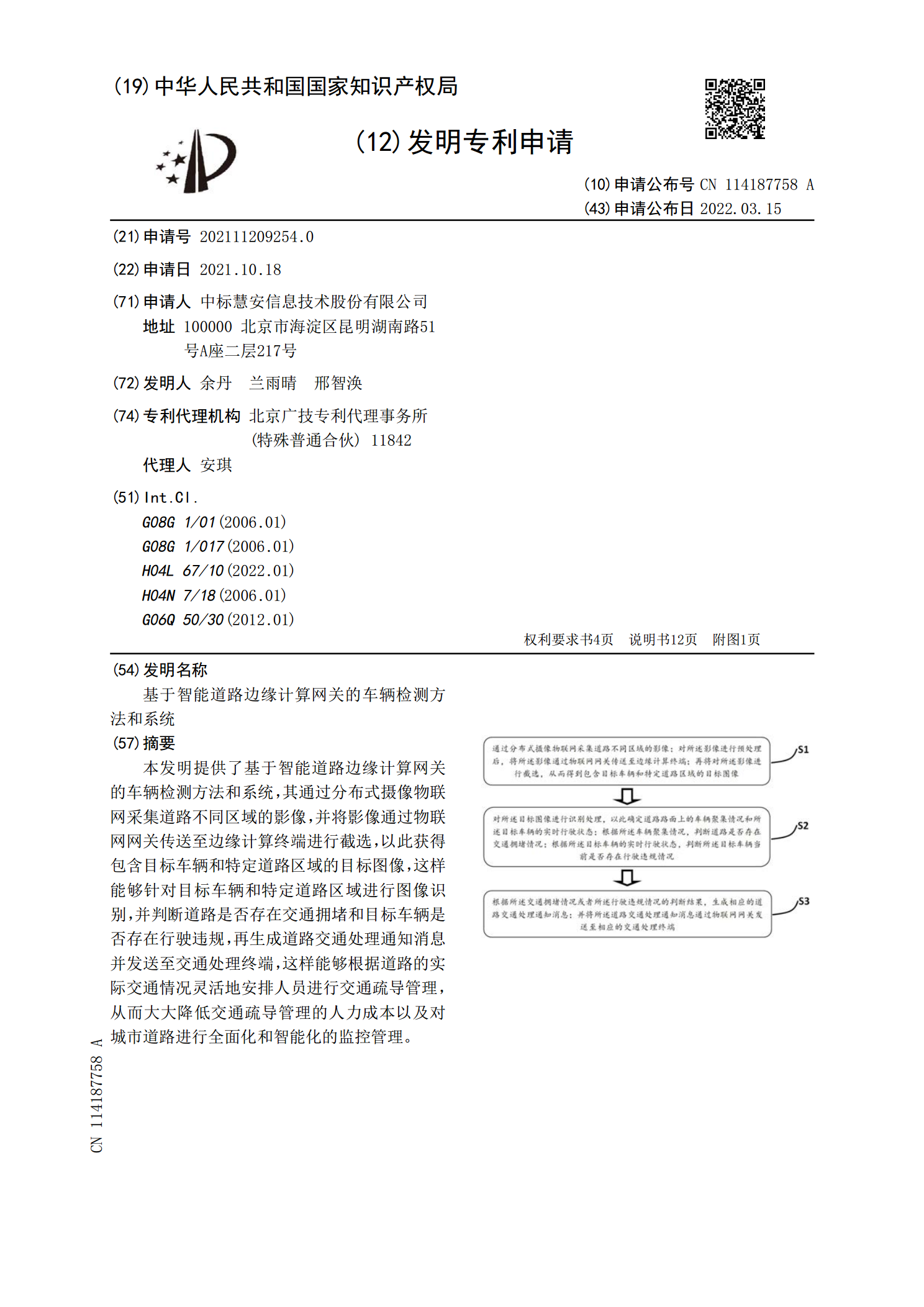
本发明提供了基于智能道路边缘计算网关的车辆检测方法和系统,其通过分布式摄像物联网采集道路不同区域的影像,并将影像通过物联网网关传送至边缘计算终端进行截选,以此获得包含目标车辆和特定道路区域的目标图像,这样能够针对目标车辆和特定道路区域进行图像识别,并判断道路是否存在交通拥堵和目标车辆是否存在行驶违规,再生成道路交通处理通知消息并发送至交通处理终端,这样能够根据道路的实际交通情况灵活地安排人员进行交通疏导管理,从而大大降低交通疏导管理的人力成本以及对城市道路进行全面化和智能化的监控管理。

基于边缘计算的区域异常检测方法和系统.pdf
本发明提供了基于边缘计算的区域异常检测方法和系统,其利用边缘计算设备对布置在不同位置的拍摄设备进行拍摄控制,以此获得关于目标区域的影像,并利用边缘计算设备对所有影像进行边缘计算策略的识别与拼接,从而获得目标区域对应的全景区域影像;再对全景区域影像进行分区域识别而确定每个子区域是否存在交通异常情况,从而将存在交通异常情况的子区域所在的位置上报,其利用边缘计算设备对所有拍摄设备进行联动控制,以此保证目标区域能够获得同步全面化的影像拍摄,而利用边缘计算策略来处理影像,能够对每个拍摄设备采集的影像进行同步一致的处

基于边缘网关的物联网数据智能处理方法.pdf
本发明公开一种基于边缘网关的物联网数据智能处理方法,基于边缘网关的物联网数据智能处理方法,包括:步骤1、边缘网关与物联网子域内的物联网设备相连,并采集物联网设备的数据;步骤2、边缘网关对采集的数据进行预处理,以获取模型参数;步骤3、边缘网关将数据以及模型参数发送给云端服务器;步骤4、云端服务器对接收到的数据和模型参数与已存储的AI模型匹配,进行物联网子域内的统计分析和计算以获得整合数据信息并存储;步骤5、云端服务器接受用户发起的业务请求后,根据业务请求获取相匹配的整合数据信息;步骤6、云端服务器的整合数据
一种基于MEC边缘智能网关的用电管理方法及系统.pdf
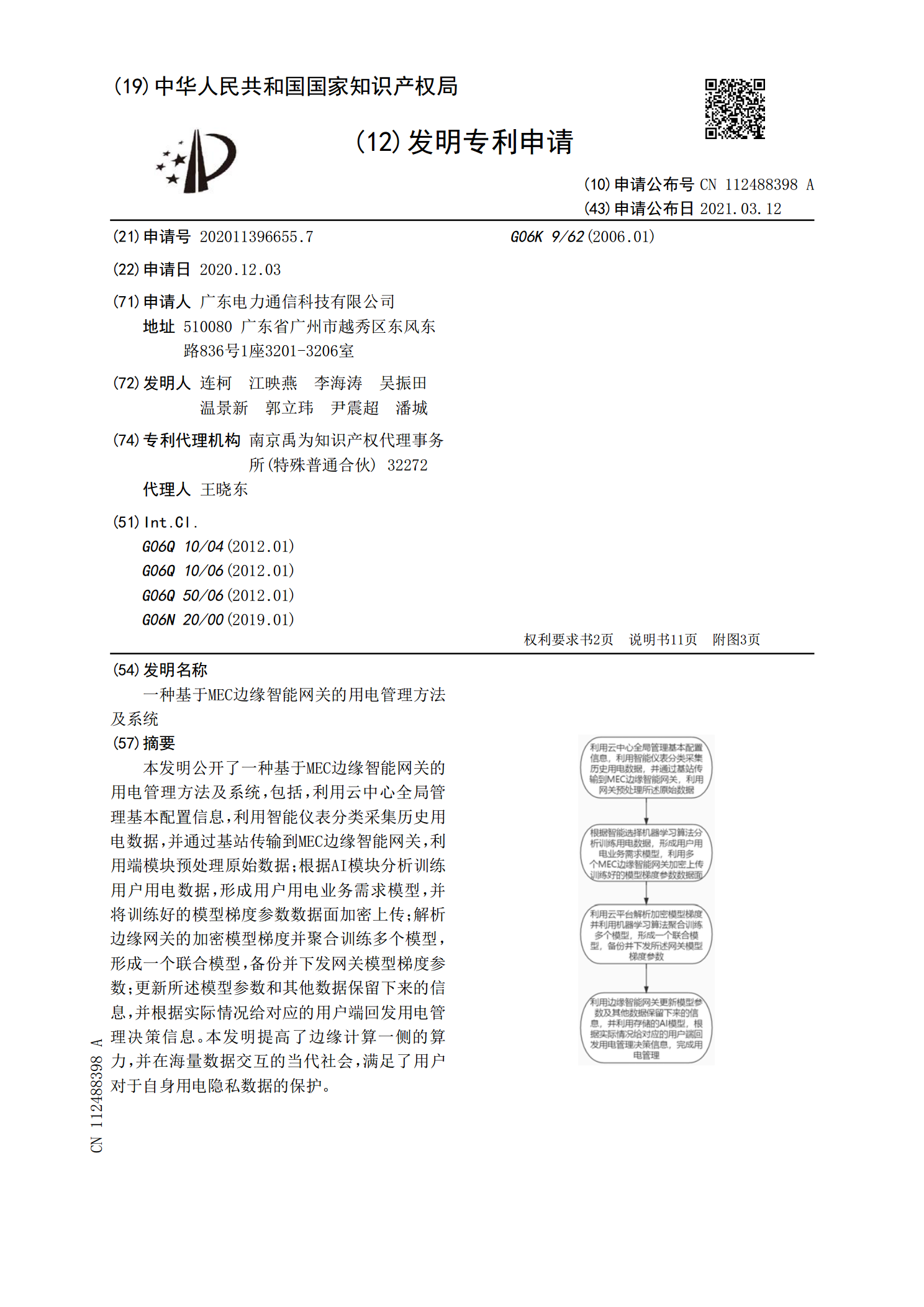
本发明公开了一种基于MEC边缘智能网关的用电管理方法及系统,包括,利用云中心全局管理基本配置信息,利用智能仪表分类采集历史用电数据,并通过基站传输到MEC边缘智能网关,利用端模块预处理原始数据;根据AI模块分析训练用户用电数据,形成用户用电业务需求模型,并将训练好的模型梯度参数数据面加密上传;解析边缘网关的加密模型梯度并聚合训练多个模型,形成一个联合模型,备份并下发网关模型梯度参数;更新所述模型参数和其他数据保留下来的信息,并根据实际情况给对应的用户端回发用电管理决策信息。本发明提高了边缘计算一侧的算力,
基于边缘计算的人群异动智能安全检测系统.pdf
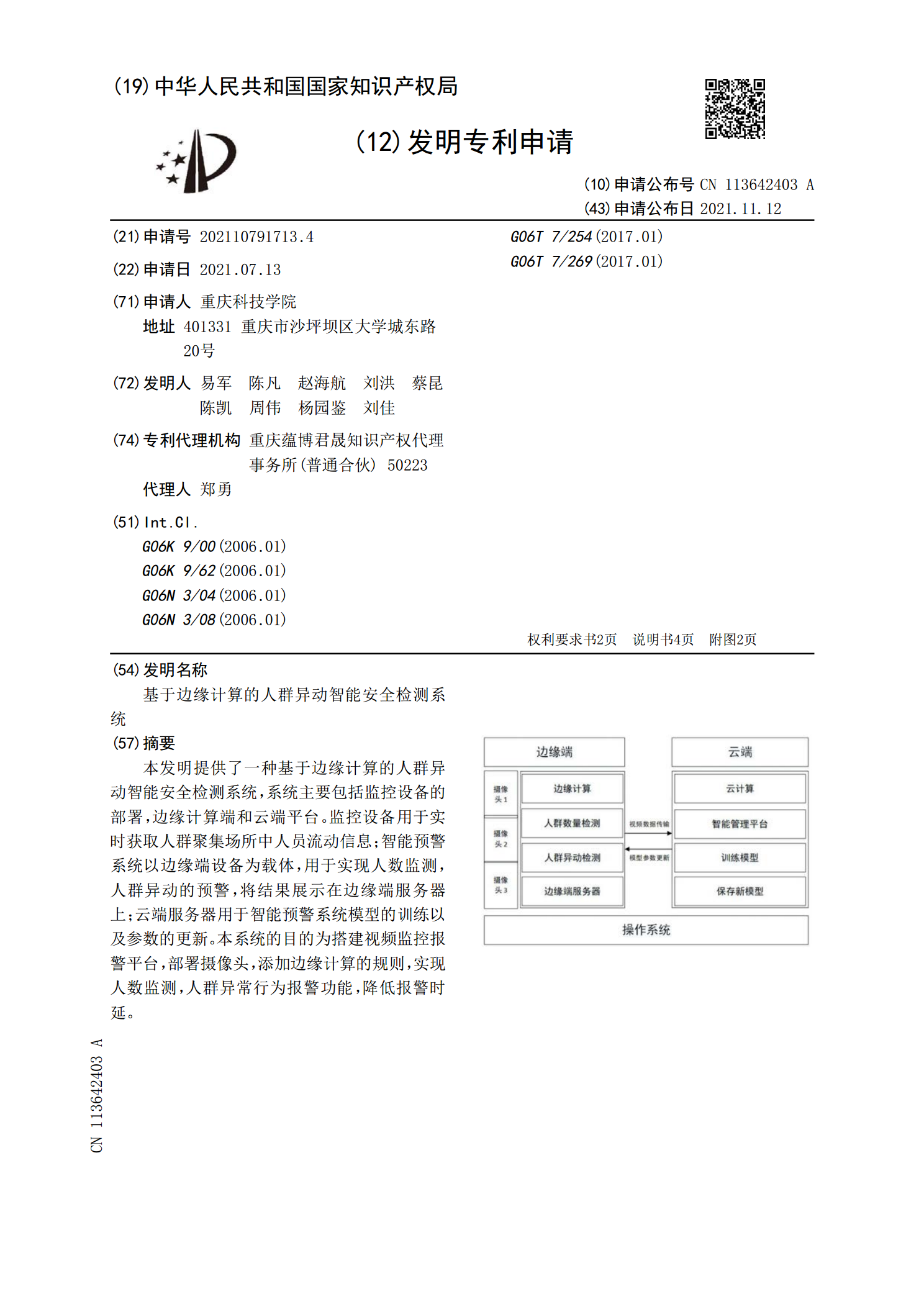
本发明提供了一种基于边缘计算的人群异动智能安全检测系统,系统主要包括监控设备的部署,边缘计算端和云端平台。监控设备用于实时获取人群聚集场所中人员流动信息;智能预警系统以边缘端设备为载体,用于实现人数监测,人群异动的预警,将结果展示在边缘端服务器上;云端服务器用于智能预警系统模型的训练以及参数的更新。本系统的目的为搭建视频监控报警平台,部署摄像头,添加边缘计算的规则,实现人数监测,人群异常行为报警功能,降低报警时延。