
基于机器视觉的道路抛洒物检测追踪方法和系统.pdf

猫巷****觅蓉

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机器视觉的道路抛洒物检测追踪方法和系统.pdf
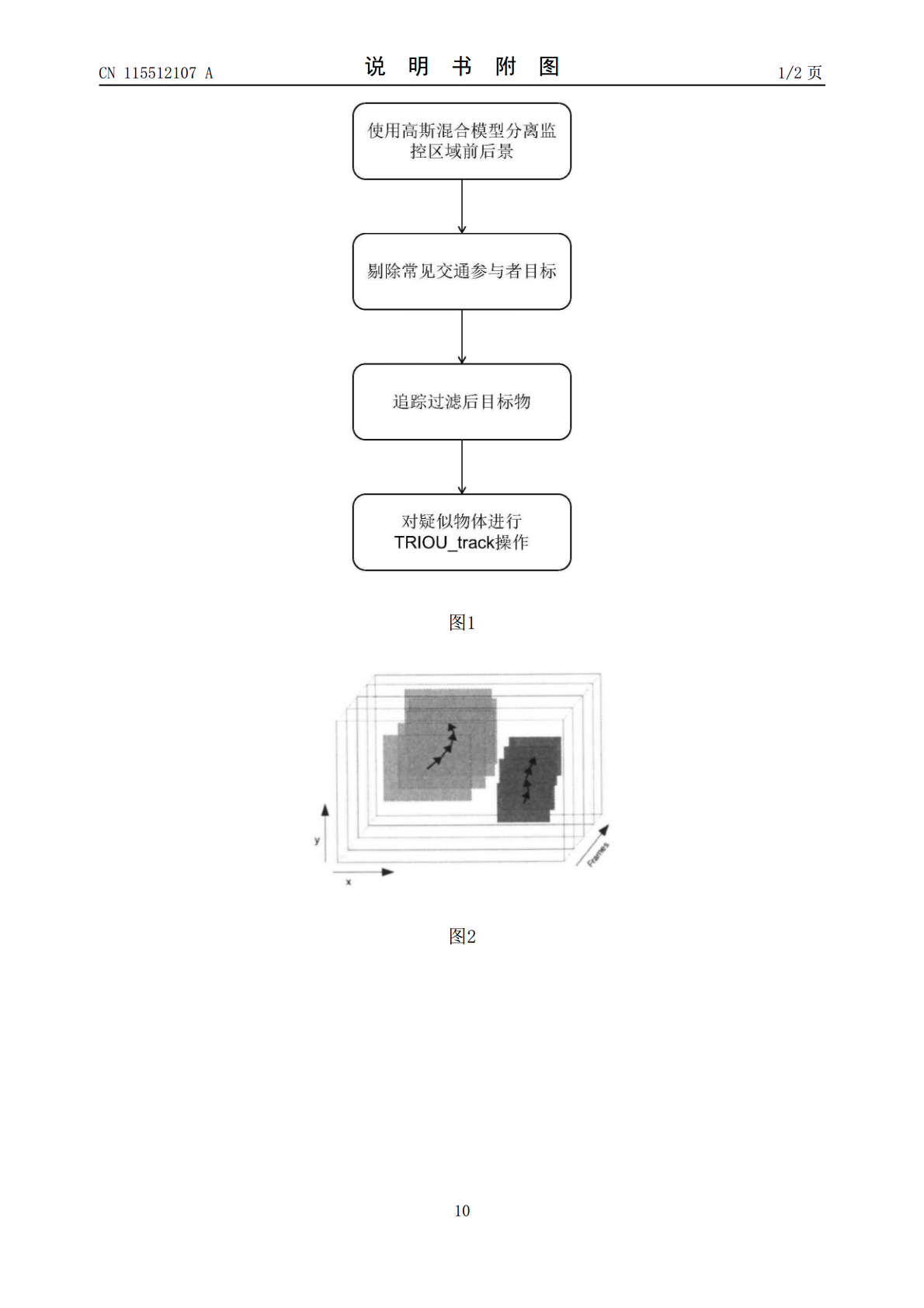
本发明提供了一种基于机器视觉的道路抛洒物检测追踪方法和系统,包括:步骤1:使用高斯混合模型分离监控区域前后景;步骤2:剔除预设交通参与者目标;步骤3:获取前景目标的最小矩形框的像素位置,逐个与神经网络检出物进行递归匹配比较,若匹配则剔除目标,不进行疑似抛洒物追踪;若不匹配则进行疑似抛洒物追踪;步骤4:对疑似抛洒物从运动态到静止态进行交并比IoU追踪,根据交并比值确认是否为抛洒物。本发明解决了路测端视觉抛洒物体难以检测,并且准确度偏低的问题,通过低计算复杂度的TRIOU_track算法,能够高效实时追踪抛洒
基于USV的视觉检测和水面目标追踪系统及其检测追踪方法.pdf
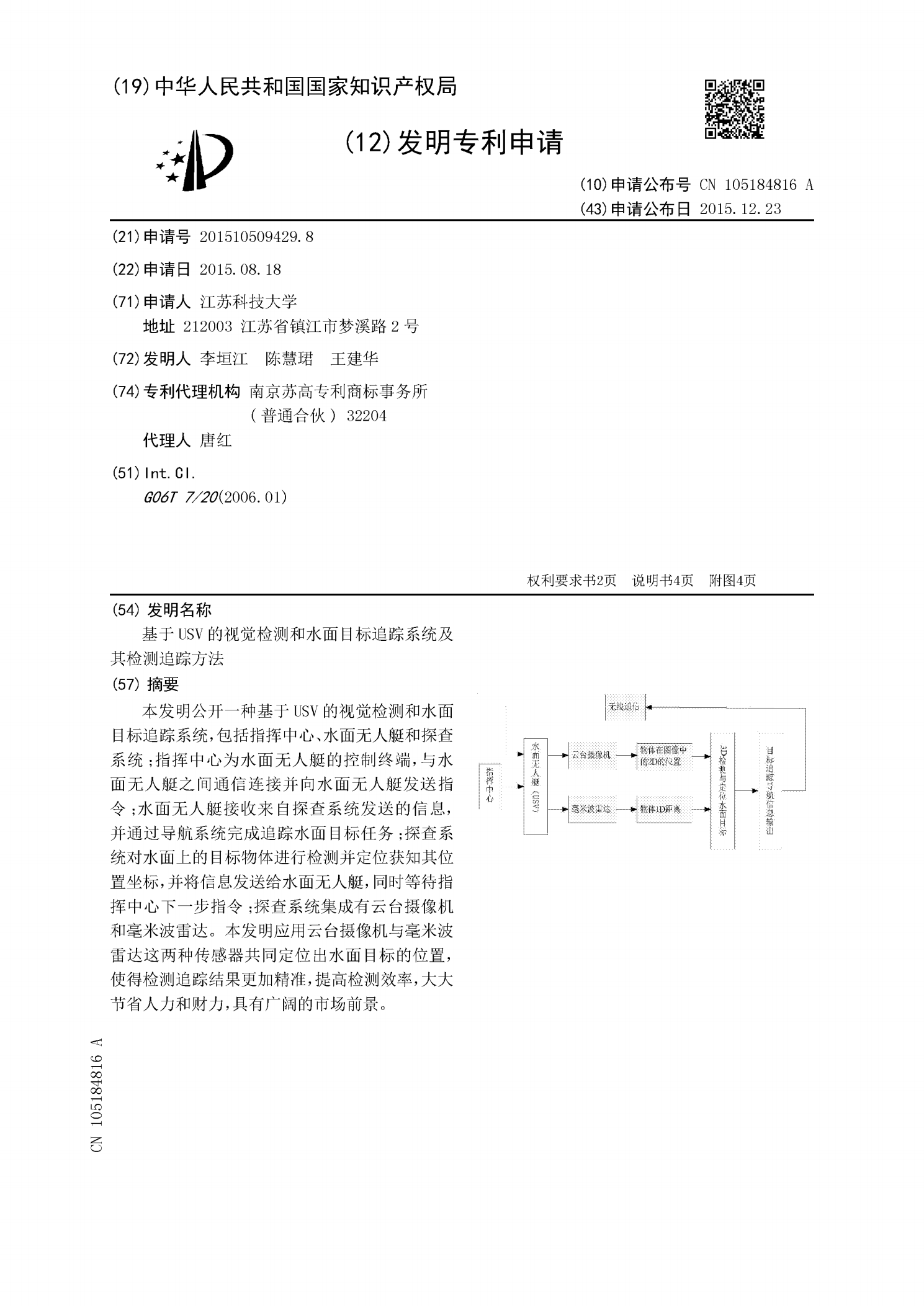
本发明公开一种基于USV的视觉检测和水面目标追踪系统,包括指挥中心、水面无人艇和探查系统;指挥中心为水面无人艇的控制终端,与水面无人艇之间通信连接并向水面无人艇发送指令;水面无人艇接收来自探查系统发送的信息,并通过导航系统完成追踪水面目标任务;探查系统对水面上的目标物体进行检测并定位获知其位置坐标,并将信息发送给水面无人艇,同时等待指挥中心下一步指令;探查系统集成有云台摄像机和毫米波雷达。本发明应用云台摄像机与毫米波雷达这两种传感器共同定位出水面目标的位置,使得检测追踪结果更加精准,提高检测效率,大大节省
基于目标检测和追踪的车辆横穿道路实线检测方法及系统.pdf
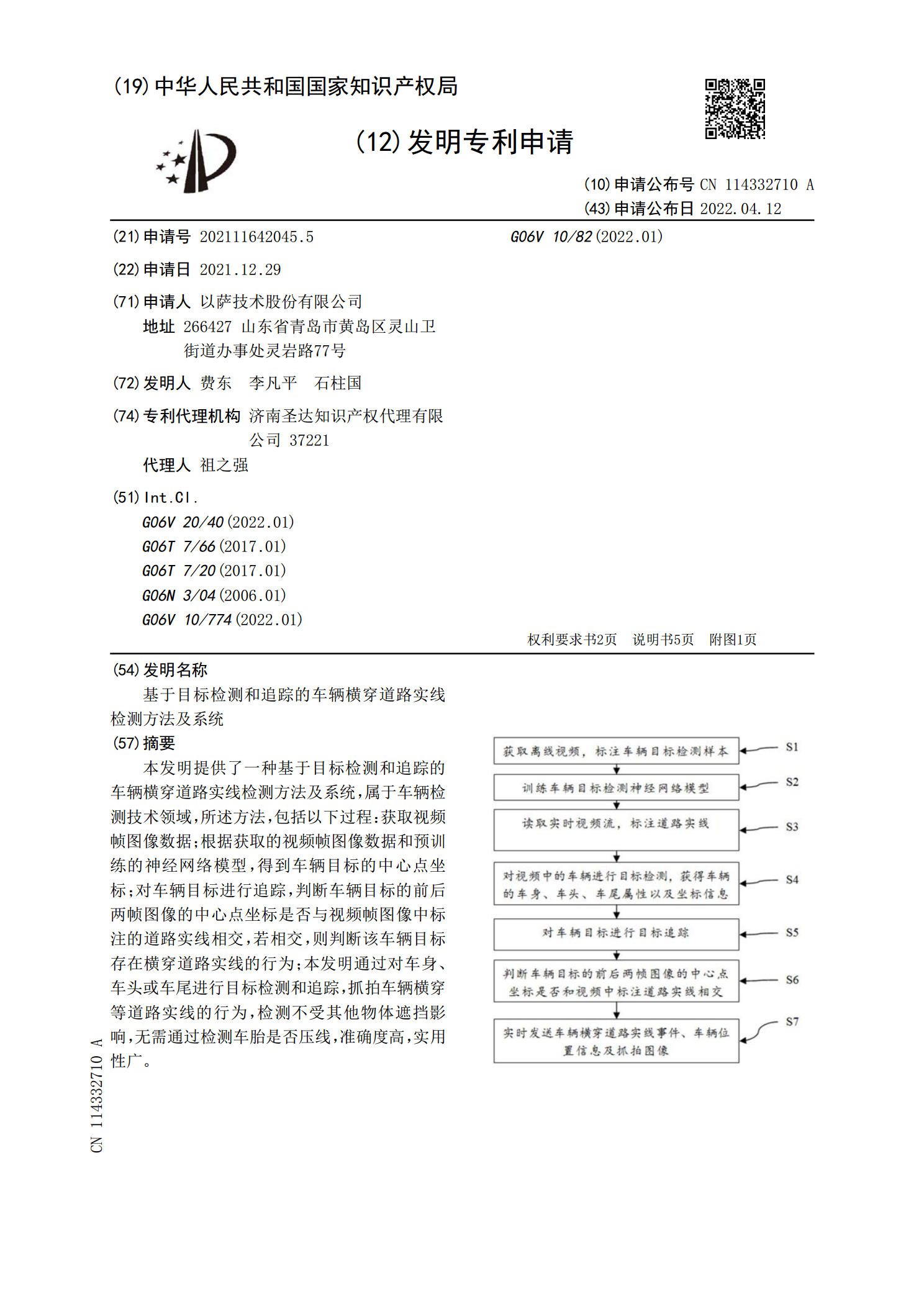
本发明提供了一种基于目标检测和追踪的车辆横穿道路实线检测方法及系统,属于车辆检测技术领域,所述方法,包括以下过程:获取视频帧图像数据;根据获取的视频帧图像数据和预训练的神经网络模型,得到车辆目标的中心点坐标;对车辆目标进行追踪,判断车辆目标的前后两帧图像的中心点坐标是否与视频帧图像中标注的道路实线相交,若相交,则判断该车辆目标存在横穿道路实线的行为;本发明通过对车身、车头或车尾进行目标检测和追踪,抓拍车辆横穿等道路实线的行为,检测不受其他物体遮挡影响,无需通过检测车胎是否压线,准确度高,实用性广。
基于机器视觉的弯管机球头检测系统及检测方法.pdf
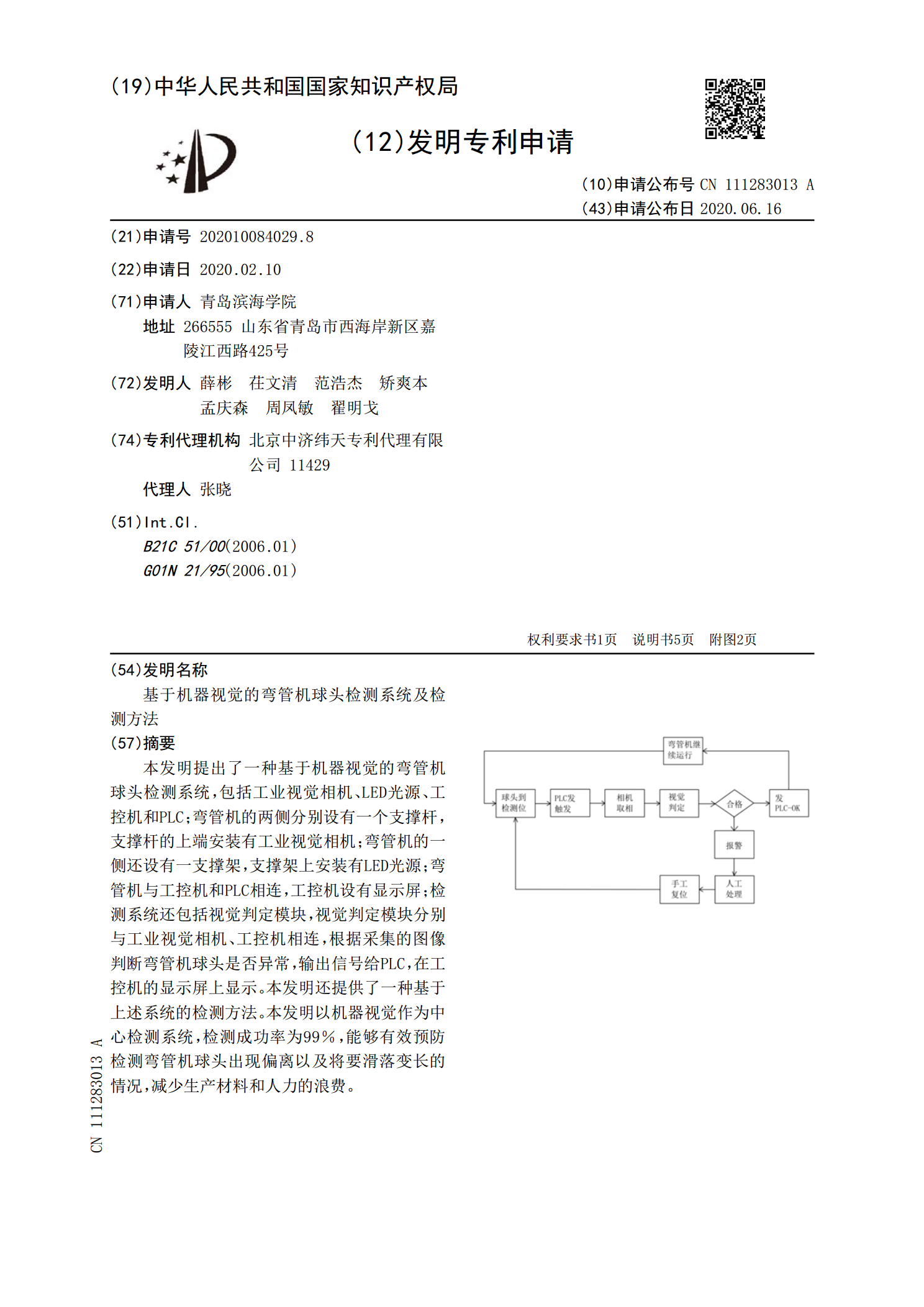
本发明提出了一种基于机器视觉的弯管机球头检测系统,包括工业视觉相机、LED光源、工控机和PLC;弯管机的两侧分别设有一个支撑杆,支撑杆的上端安装有工业视觉相机;弯管机的一侧还设有一支撑架,支撑架上安装有LED光源;弯管机与工控机和PLC相连,工控机设有显示屏;检测系统还包括视觉判定模块,视觉判定模块分别与工业视觉相机、工控机相连,根据采集的图像判断弯管机球头是否异常,输出信号给PLC,在工控机的显示屏上显示。本发明还提供了一种基于上述系统的检测方法。本发明以机器视觉作为中心检测系统,检测成功率为99%,能
一种基于机器视觉的图像追踪定位方法及系统.pdf
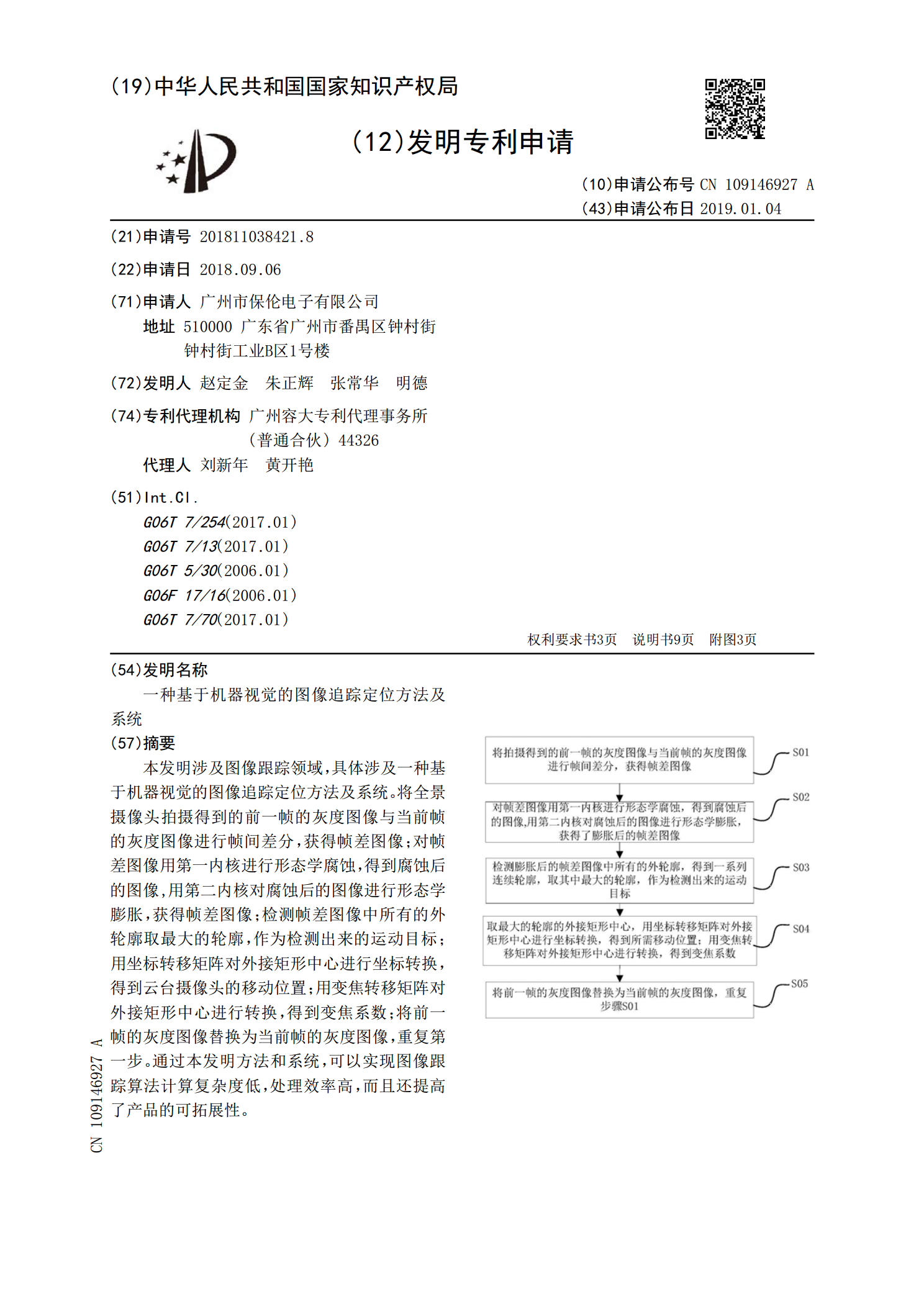
本发明涉及图像跟踪领域,具体涉及一种基于机器视觉的图像追踪定位方法及系统。将全景摄像头拍摄得到的前一帧的灰度图像与当前帧的灰度图像进行帧间差分,获得帧差图像;对帧差图像用第一内核进行形态学腐蚀,得到腐蚀后的图像,用第二内核对腐蚀后的图像进行形态学膨胀,获得帧差图像;检测帧差图像中所有的外轮廓取最大的轮廓,作为检测出来的运动目标;用坐标转移矩阵对外接矩形中心进行坐标转换,得到云台摄像头的移动位置;用变焦转移矩阵对外接矩形中心进行转换,得到变焦系数;将前一帧的灰度图像替换为当前帧的灰度图像,重复第一步。通过本