
使用雷达和视觉基于车轮进行的车辆检测和追踪.pdf

一吃****新冬


1/10

2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
使用雷达和视觉基于车轮进行的车辆检测和追踪.pdf
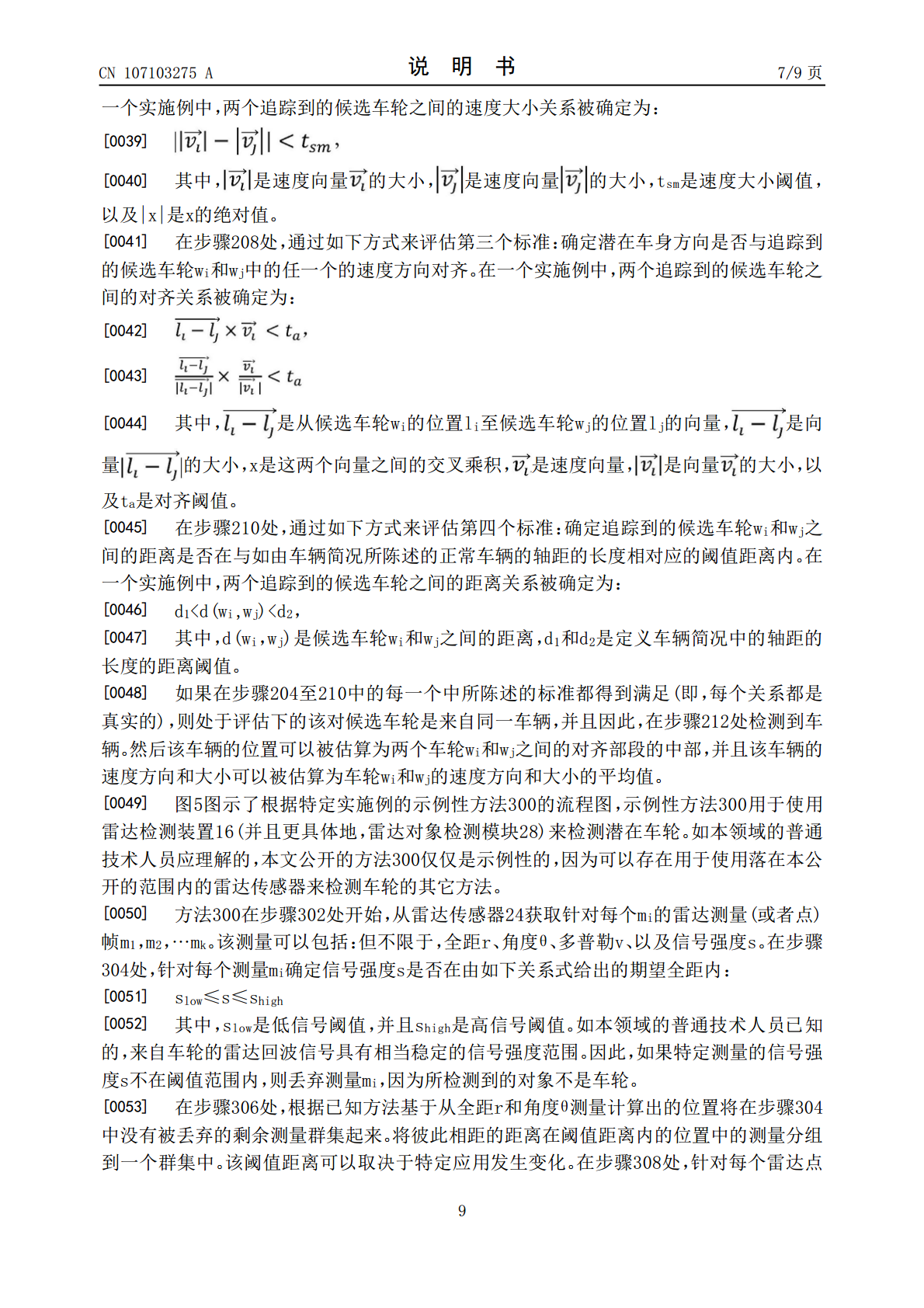
提供了一种用于使用车轮检测来检测相对于主车辆的远程车辆的系统和方法。该系统和方法包括:基于从多个对象检测装置接收到的车轮检测数据来追踪候选车轮;将与每个追踪到的候选车轮的车轮检测数据有关的选择参数进行比较;以及通过基于对选择参数的比较来确定任何追踪到的候选车轮之间是否存在阈值关联来识别远程车辆。

基于毫米波雷达和机器视觉融合的车辆检测.pptx
,目录PartOnePartTwo毫米波雷达的工作原理机器视觉检测原理融合方法和技术融合的优势和挑战PartThree自动驾驶系统智能交通监控智能停车场车辆安全系统PartFour提高检测精度和可靠性实时性和高效性适应各种环境和天气条件降低成本和提高普及率PartFive数据采集和处理特征提取和匹配目标跟踪和识别结果输出和可视化PartSix实验环境和数据集实验过程和方法实验结果和分析与其他方法的比较和优势分析PartSeven技术改进和创新方向应用领域的拓展和深化面临的挑战和解决方案对行业和社会的影响和
基于USV的视觉检测和水面目标追踪系统及其检测追踪方法.pdf
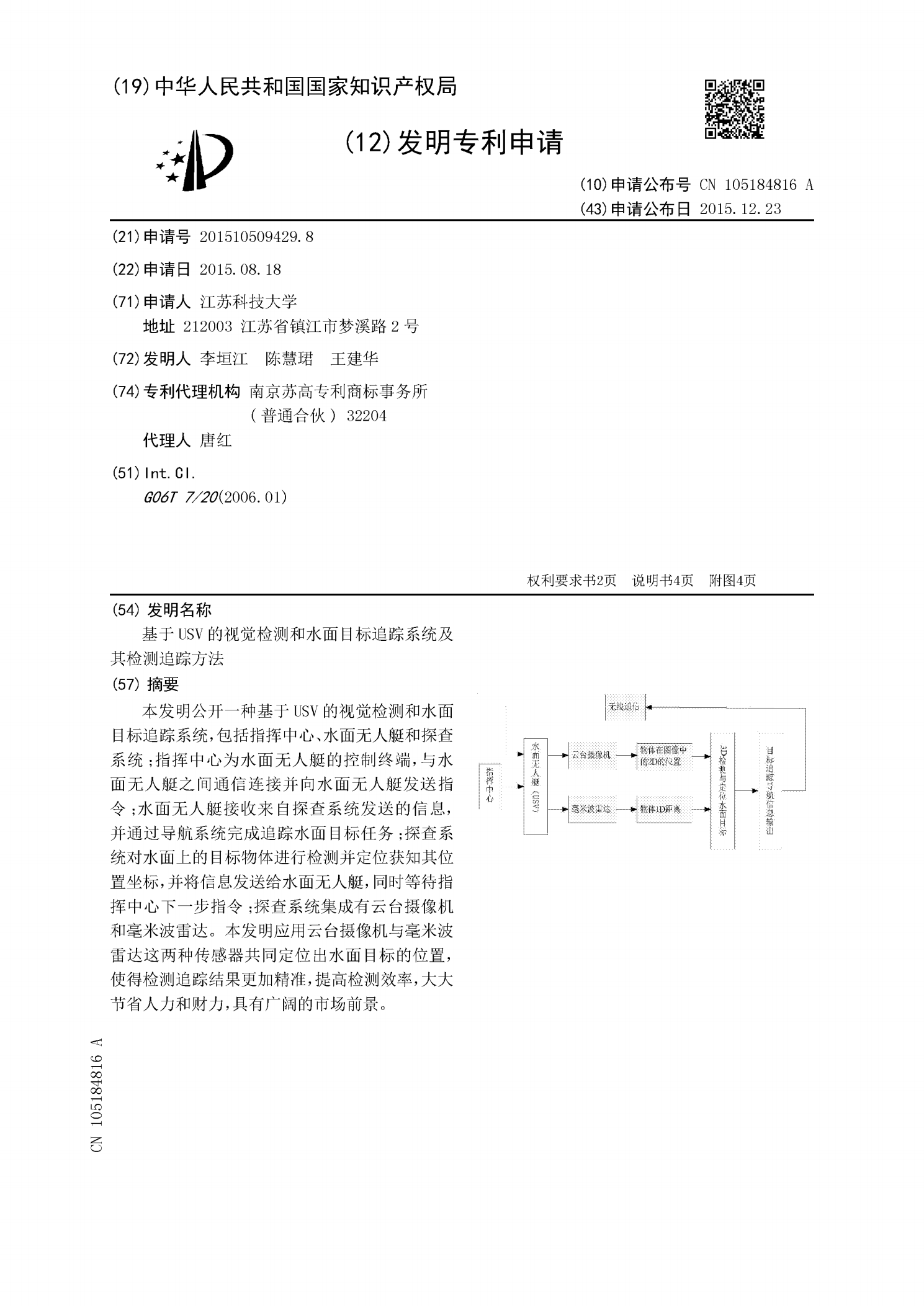
本发明公开一种基于USV的视觉检测和水面目标追踪系统,包括指挥中心、水面无人艇和探查系统;指挥中心为水面无人艇的控制终端,与水面无人艇之间通信连接并向水面无人艇发送指令;水面无人艇接收来自探查系统发送的信息,并通过导航系统完成追踪水面目标任务;探查系统对水面上的目标物体进行检测并定位获知其位置坐标,并将信息发送给水面无人艇,同时等待指挥中心下一步指令;探查系统集成有云台摄像机和毫米波雷达。本发明应用云台摄像机与毫米波雷达这两种传感器共同定位出水面目标的位置,使得检测追踪结果更加精准,提高检测效率,大大节省

基于激光雷达和视觉信息融合的车辆识别与跟踪.docx
基于激光雷达和视觉信息融合的车辆识别与跟踪基于激光雷达和视觉信息融合的车辆识别与跟踪摘要:车辆识别与跟踪是自动驾驶和智能交通系统中的关键技术之一。本文基于激光雷达和视觉信息融合的方法,提出了一种用于车辆识别与跟踪的算法。该算法首先利用激光雷达获取车辆的三维点云数据,并通过聚类和目标分割算法进行车辆的识别。然后,利用视觉信息对车辆进行跟踪和预测,并通过信息融合方法将激光雷达和视觉信息进行整合,提高车辆识别和跟踪的准确性和稳定性。实验结果表明,所提出的方法在车辆识别和跟踪方面取得了显著的性能提升。关键词:激光

基于激光雷达和视觉信息融合的车辆识别与跟踪.docx
基于激光雷达和视觉信息融合的车辆识别与跟踪摘要随着智能交通的发展,车辆识别与跟踪成为了自动驾驶领域中的一个重要问题。本文基于激光雷达和视觉信息融合,提出了一种车辆识别与跟踪方法。首先,利用激光雷达获取车辆轮廓信息,然后利用视觉算法进行车辆定位与跟踪。通过将激光雷达和视觉信息进行融合,能够提高车辆的识别与跟踪的准确性和实时性。实验结果表明,本文方法能够有效地识别和跟踪城市道路上的车辆。关键词:激光雷达;视觉信息;车辆识别;车辆跟踪AbstractWiththedevelopmentofintelligent