
多摄像头模组的标定方法、装置、设备及介质.pdf

哲妍****彩妍

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多摄像头模组的标定方法、装置、设备及介质.pdf
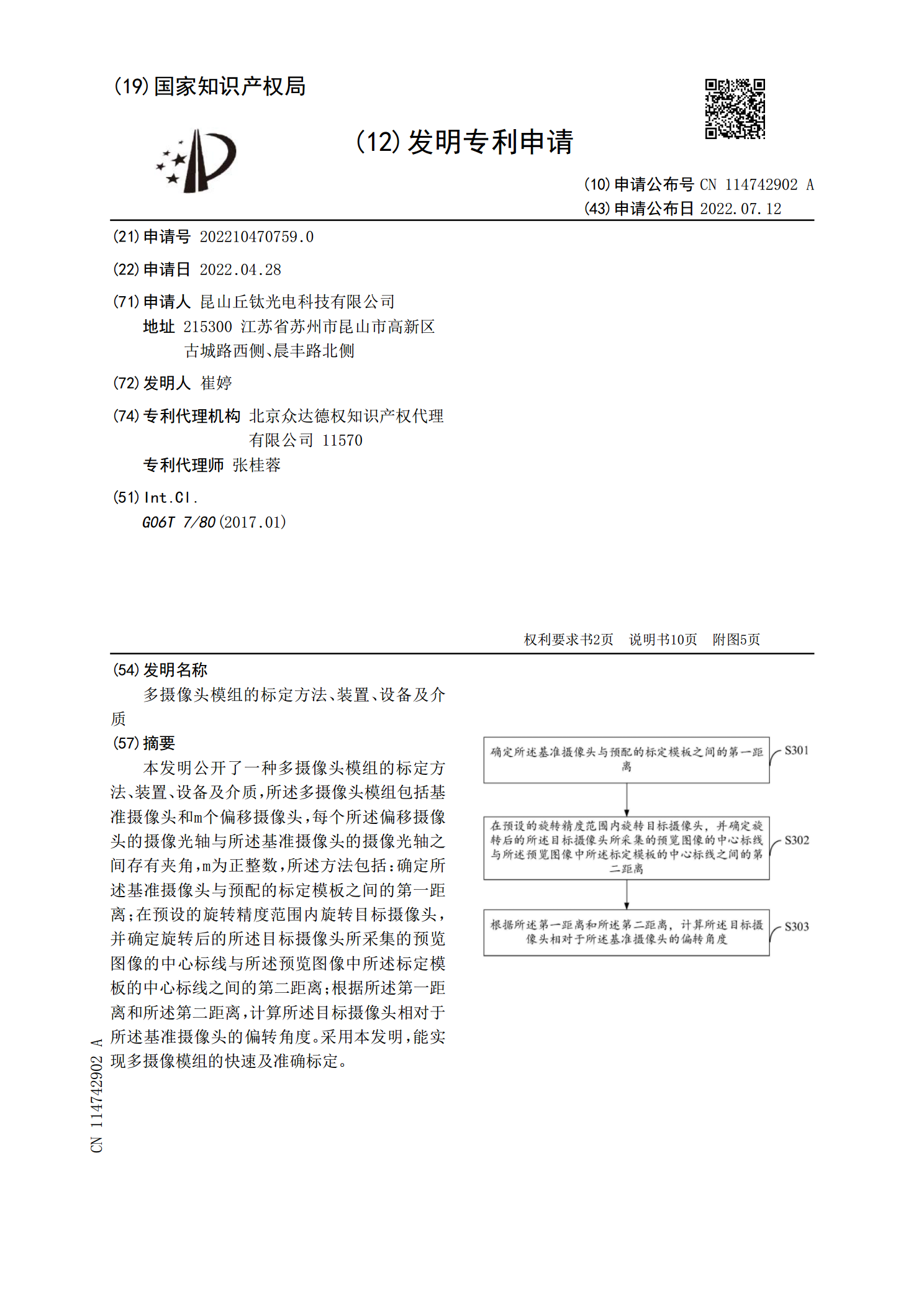
本发明公开了一种多摄像头模组的标定方法、装置、设备及介质,所述多摄像头模组包括基准摄像头和m个偏移摄像头,每个所述偏移摄像头的摄像光轴与所述基准摄像头的摄像光轴之间存有夹角,m为正整数,所述方法包括:确定所述基准摄像头与预配的标定模板之间的第一距离;在预设的旋转精度范围内旋转目标摄像头,并确定旋转后的所述目标摄像头所采集的预览图像的中心标线与所述预览图像中所述标定模板的中心标线之间的第二距离;根据所述第一距离和所述第二距离,计算所述目标摄像头相对于所述基准摄像头的偏转角度。采用本发明,能实现多摄像模组的快

验证摄像头模组标定精度、摄像头模组测试方法及装置.pdf
本发明公开了一种验证摄像头模组标定精度、摄像头模组测试方法及装置,获取TOF摄像头模组对目标黑白测试图的成像结果,并从成像结果提取灰度图像和深度图像;确定灰度图像中白色区域的第一位置信息,并根据白色区域的第一位置信息,在白色区域确定目标关注区块的第二位置信息;根据第二位置信息,提取目标关注区块在深度图像中的深度信息;基于深度信息,对TOF摄像头模组的测距标定结果进行验证。通过本发明打破了验证标定精度的过程对所使用测试图的类型限制,进而一定程度解决了摄像头模组的测试步骤繁琐、测试过程耗时较长的技术问题。
对摄像模组的标定方法、装置、存储介质及电子设备.pdf
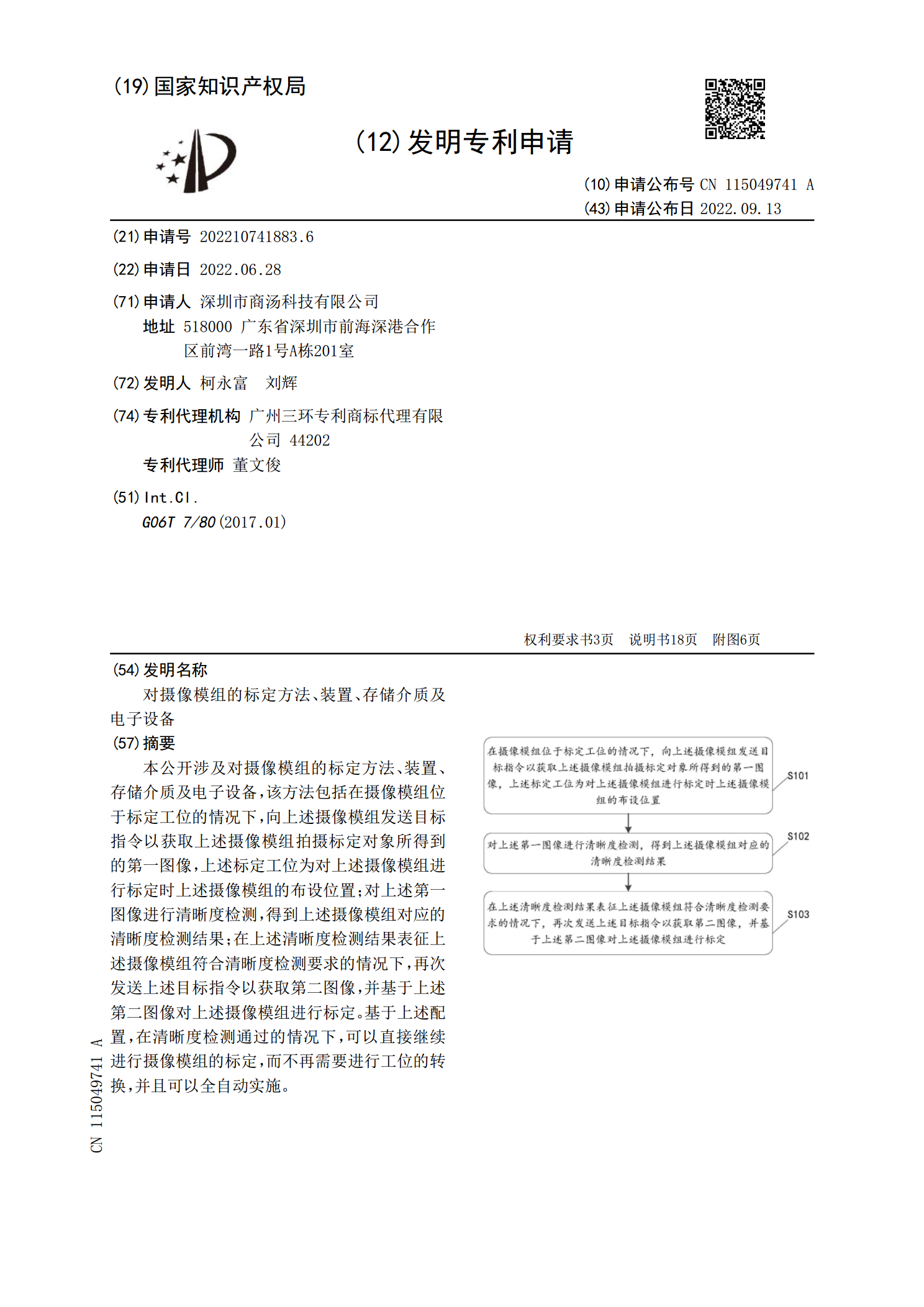
本公开涉及对摄像模组的标定方法、装置、存储介质及电子设备,该方法包括在摄像模组位于标定工位的情况下,向上述摄像模组发送目标指令以获取上述摄像模组拍摄标定对象所得到的第一图像,上述标定工位为对上述摄像模组进行标定时上述摄像模组的布设位置;对上述第一图像进行清晰度检测,得到上述摄像模组对应的清晰度检测结果;在上述清晰度检测结果表征上述摄像模组符合清晰度检测要求的情况下,再次发送上述目标指令以获取第二图像,并基于上述第二图像对上述摄像模组进行标定。基于上述配置,在清晰度检测通过的情况下,可以直接继续进行摄像模组

多摄像头标定方法、设备、存储介质及车辆.pdf
本申请实施例提供一种多摄像头标定方法、设备、存储介质及车辆,该方法包括获取多个摄像头分别在预设时间段内采集的真实图像,针对多个摄像头中的每个摄像头,根据第一摄像头与第二摄像头之间的位姿转换关系,对第二摄像头对应的真实图像进行位姿转换,生成第一摄像头对应的合成渲染图像,根据第一摄像头对应的真实图像和第一摄像头对应的合成渲染图像之间的误差,确定第一摄像头对应的误差函数,第一摄像头为自身摄像头,第二摄像头为多个摄像头中除自身摄像头之外的至少一个摄像头,根据多个误差函数,对多个位姿转换关系进行优化,获得多个摄像头
车载摄像头标定方法、装置、设备及存储介质.pdf
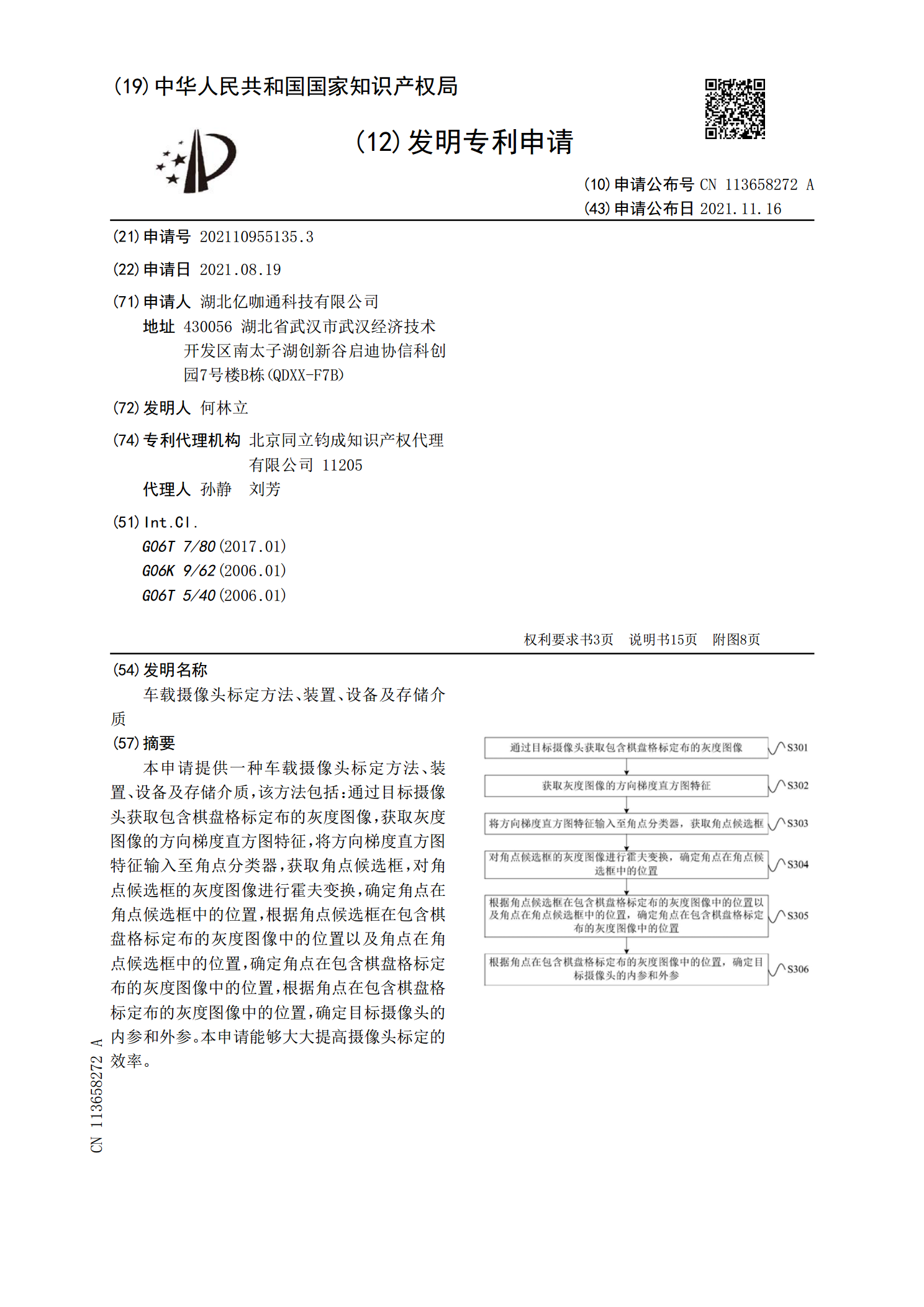
本申请提供一种车载摄像头标定方法、装置、设备及存储介质,该方法包括:通过目标摄像头获取包含棋盘格标定布的灰度图像,获取灰度图像的方向梯度直方图特征,将方向梯度直方图特征输入至角点分类器,获取角点候选框,对角点候选框的灰度图像进行霍夫变换,确定角点在角点候选框中的位置,根据角点候选框在包含棋盘格标定布的灰度图像中的位置以及角点在角点候选框中的位置,确定角点在包含棋盘格标定布的灰度图像中的位置,根据角点在包含棋盘格标定布的灰度图像中的位置,确定目标摄像头的内参和外参。本申请能够大大提高摄像头标定的效率。