
拖车倒车方法、装置、系统、介质和车辆.pdf

一吃****新冬

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
拖车倒车方法、装置、系统、介质和车辆.pdf
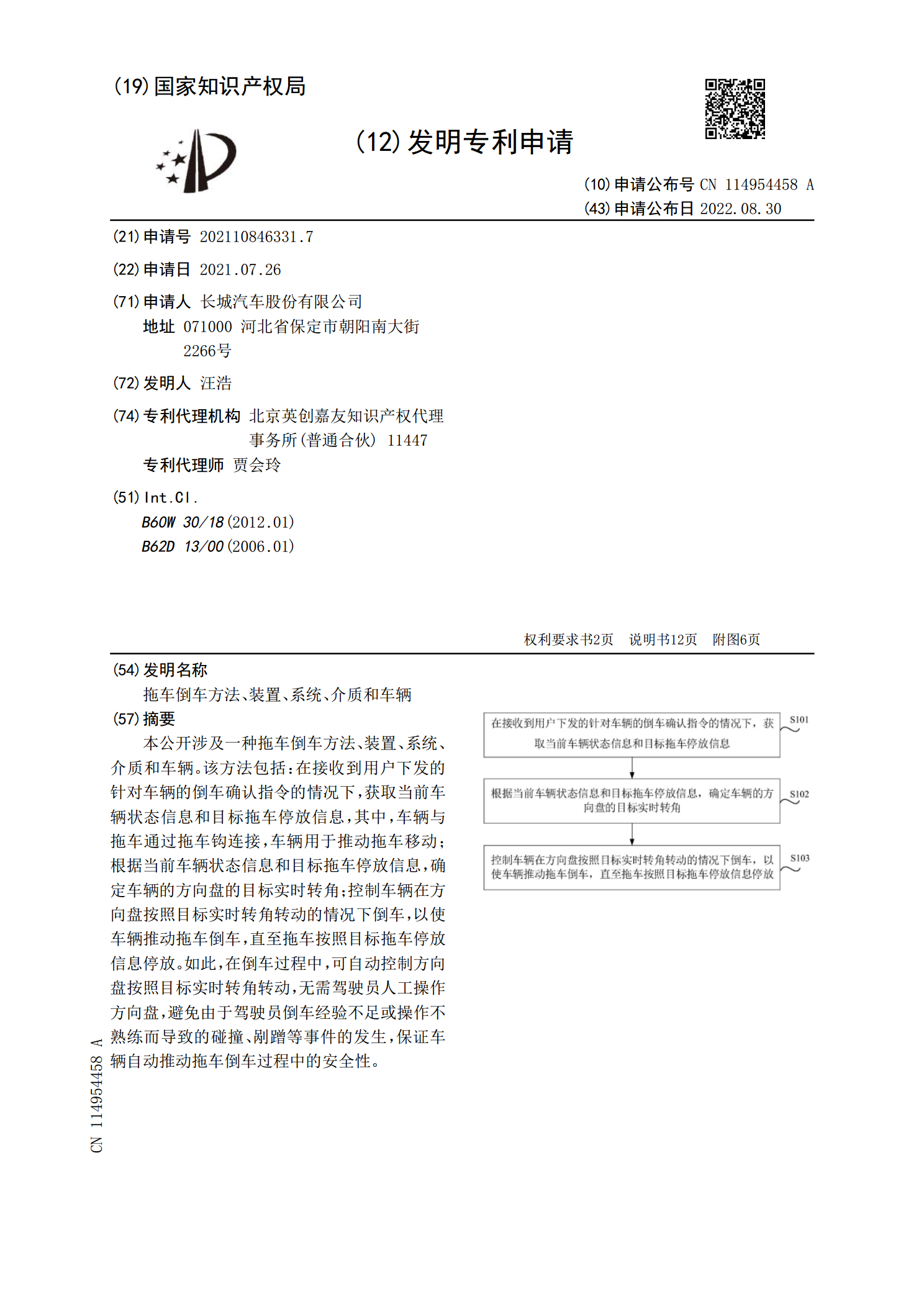
本公开涉及一种拖车倒车方法、装置、系统、介质和车辆。该方法包括:在接收到用户下发的针对车辆的倒车确认指令的情况下,获取当前车辆状态信息和目标拖车停放信息,其中,车辆与拖车通过拖车钩连接,车辆用于推动拖车移动;根据当前车辆状态信息和目标拖车停放信息,确定车辆的方向盘的目标实时转角;控制车辆在方向盘按照目标实时转角转动的情况下倒车,以使车辆推动拖车倒车,直至拖车按照目标拖车停放信息停放。如此,在倒车过程中,可自动控制方向盘按照目标实时转角转动,无需驾驶员人工操作方向盘,避免由于驾驶员倒车经验不足或操作不熟练而

电池拖车、车辆系统、运行车辆系统的方法和存储介质.pdf
本发明涉及一种电池拖车,尤其是高压电池拖车,所述电池拖车能连接到车辆上,其中,所述车辆具有车载电池和车载电池热管理系统,所述电池拖车包括:拖车电池,尤其是高压电池,所述拖车电池布置在电池支架上;拖车电池管理系统,所述拖车电池管理系统用于对所述拖车电池进行管理并且包括拖车电池热管理系统。根据本发明,所述拖车电池热管理系统独立于所述车载电池热管理系统运行。本发明还涉及一种车辆系统,一种用于运行车辆系统的方法以及一种计算机程序产品。
拖车支架装置和车辆.pdf
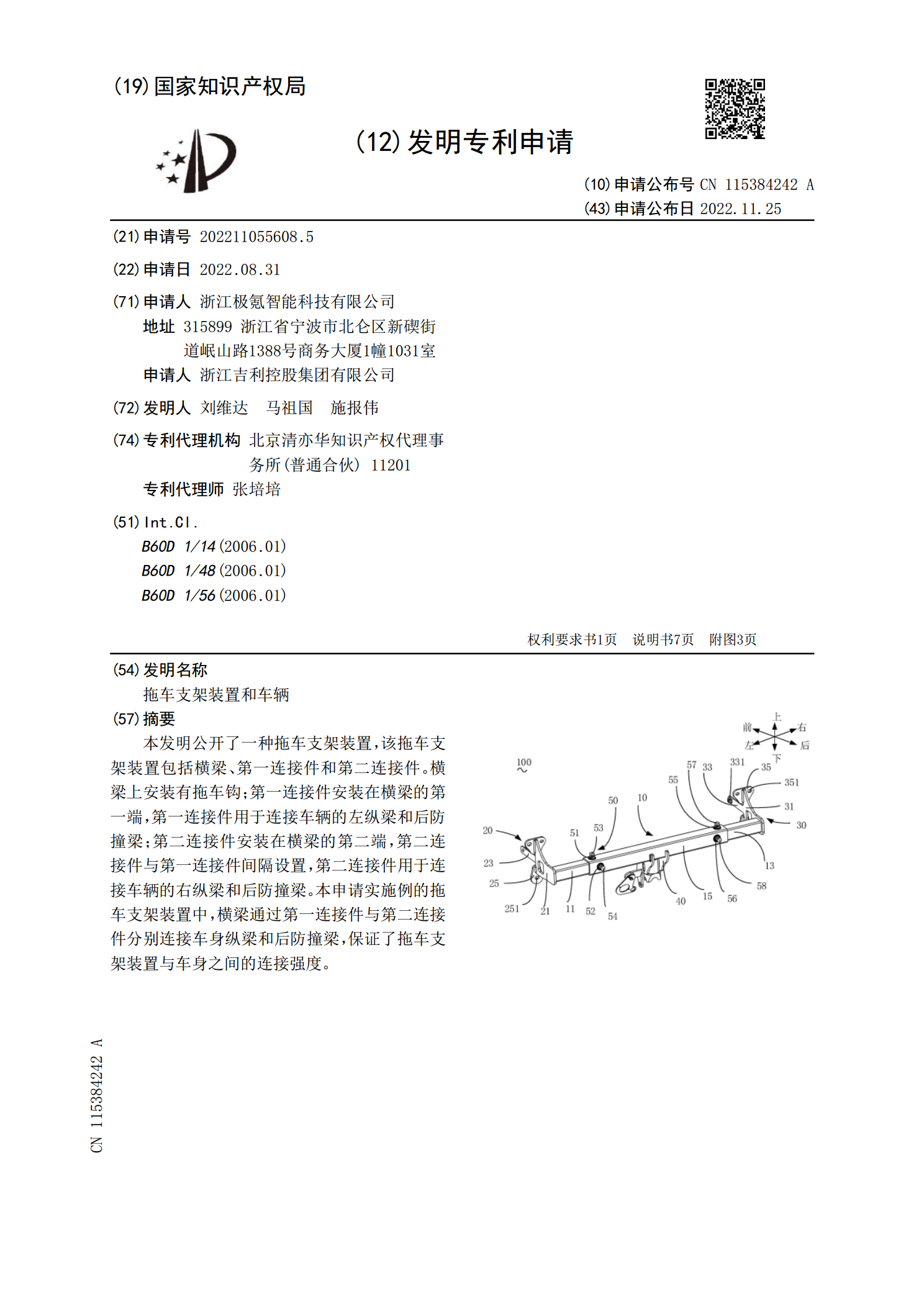
本发明公开了一种拖车支架装置,该拖车支架装置包括横梁、第一连接件和第二连接件。横梁上安装有拖车钩;第一连接件安装在横梁的第一端,第一连接件用于连接车辆的左纵梁和后防撞梁;第二连接件安装在横梁的第二端,第二连接件与第一连接件间隔设置,第二连接件用于连接车辆的右纵梁和后防撞梁。本申请实施例的拖车支架装置中,横梁通过第一连接件与第二连接件分别连接车身纵梁和后防撞梁,保证了拖车支架装置与车身之间的连接强度。
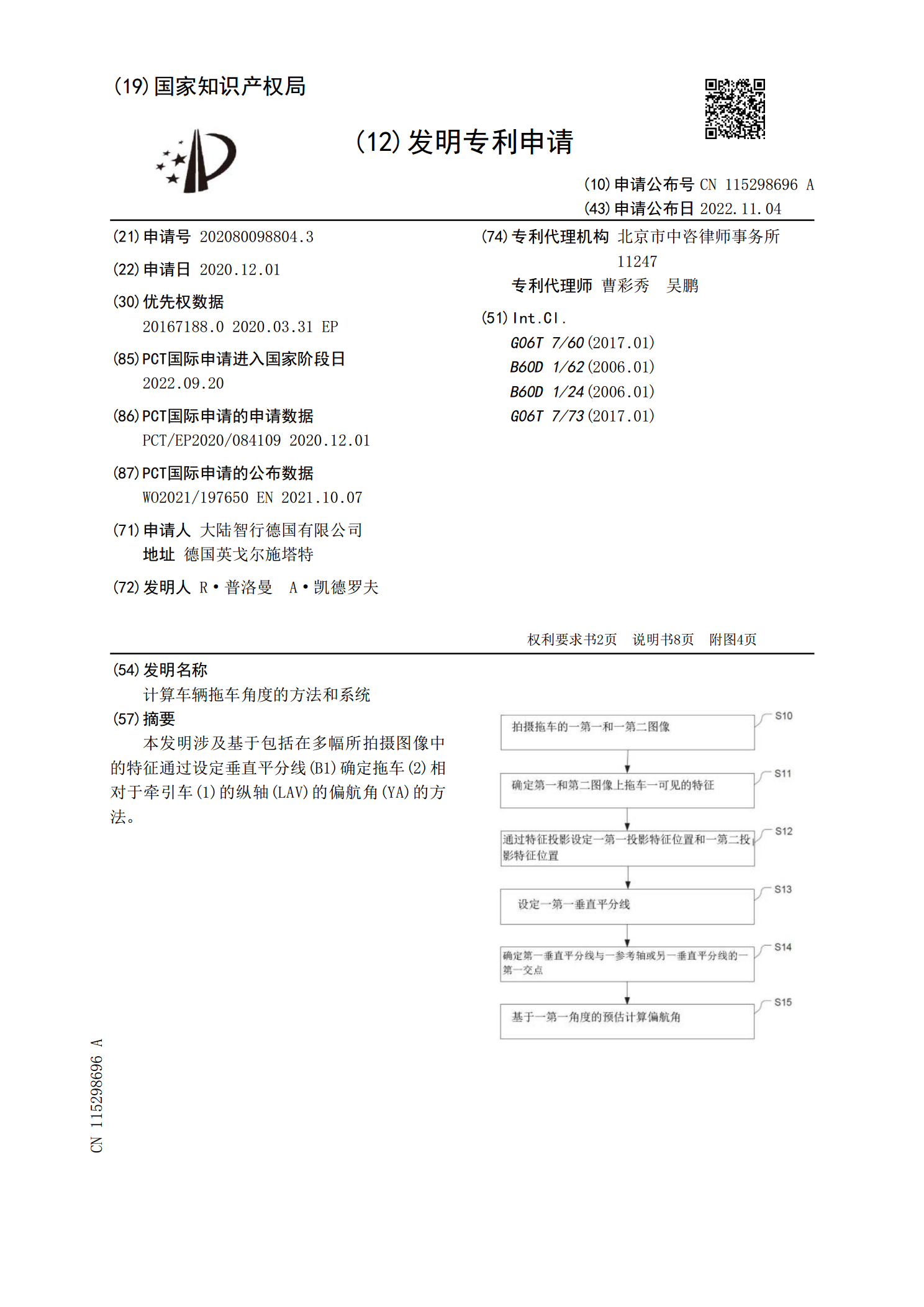
计算车辆拖车角度的方法和系统.pdf
本发明涉及一种在使用校正信息情况下,基于包含在多幅所拍摄图像中的至少一个特征(F1、F2),确定拖车(2)相对于牵引车(1)纵轴(LAV)的偏航角(YA)的方法。
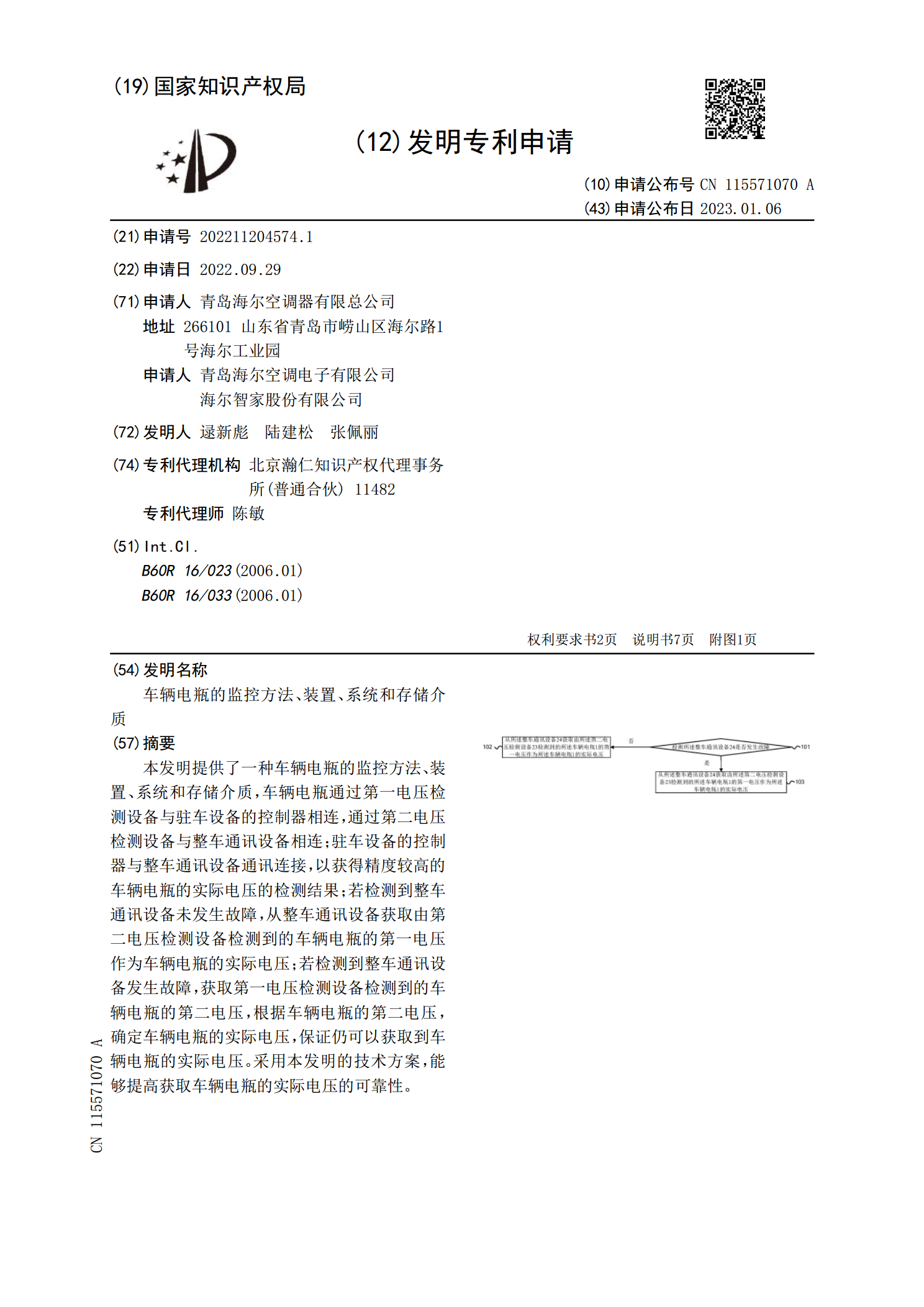
车辆电瓶的监控方法、装置、系统和存储介质.pdf
本发明提供了一种车辆电瓶的监控方法、装置、系统和存储介质,车辆电瓶通过第一电压检测设备与驻车设备的控制器相连,通过第二电压检测设备与整车通讯设备相连;驻车设备的控制器与整车通讯设备通讯连接,以获得精度较高的车辆电瓶的实际电压的检测结果;若检测到整车通讯设备未发生故障,从整车通讯设备获取由第二电压检测设备检测到的车辆电瓶的第一电压作为车辆电瓶的实际电压;若检测到整车通讯设备发生故障,获取第一电压检测设备检测到的车辆电瓶的第二电压,根据车辆电瓶的第二电压,确定车辆电瓶的实际电压,保证仍可以获取到车辆电瓶的实际