
一种基于机器视觉的两阶段主板图像缺陷检测及定位方法.pdf

猫巷****晓容

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的两阶段主板图像缺陷检测及定位方法.pdf
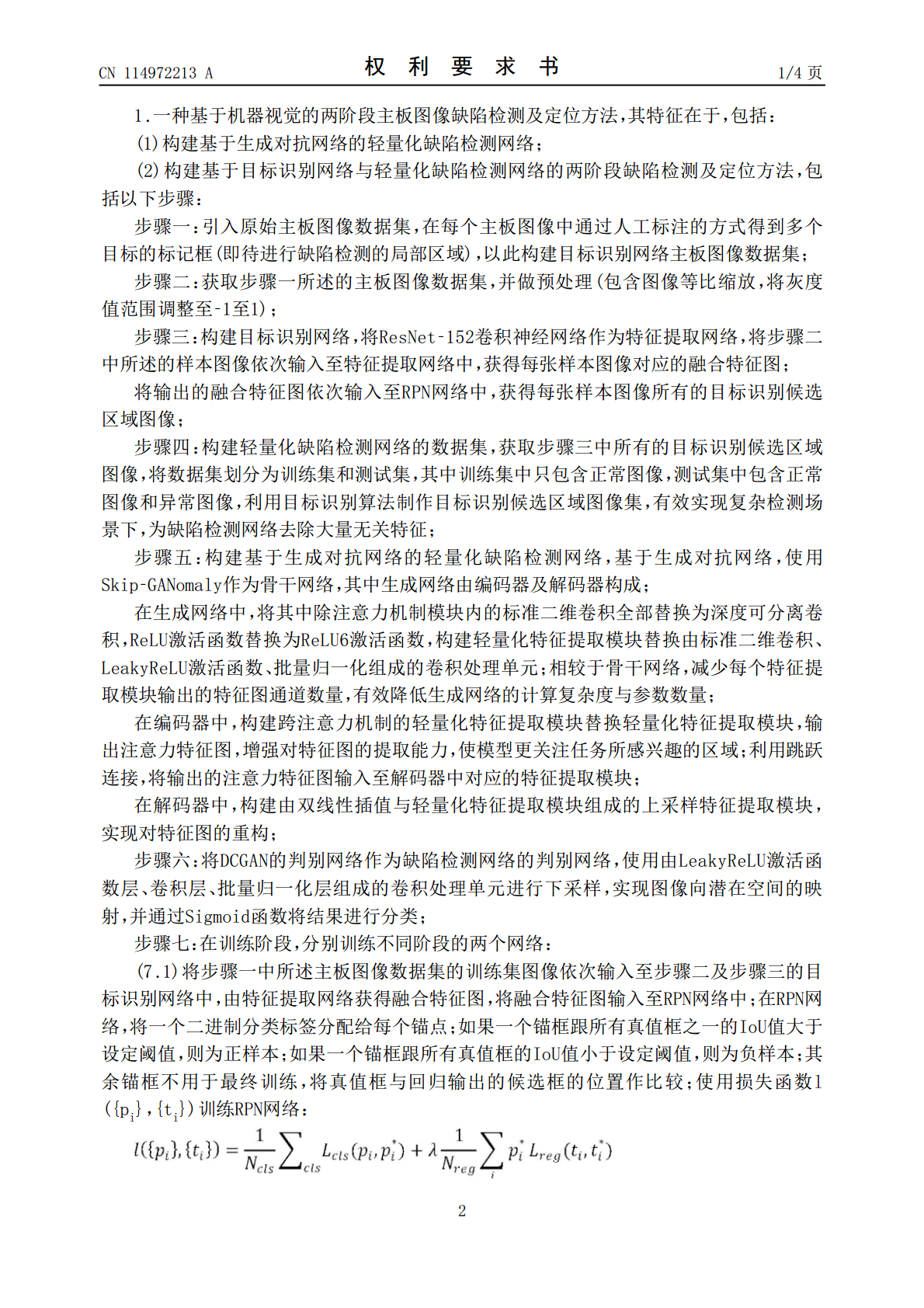
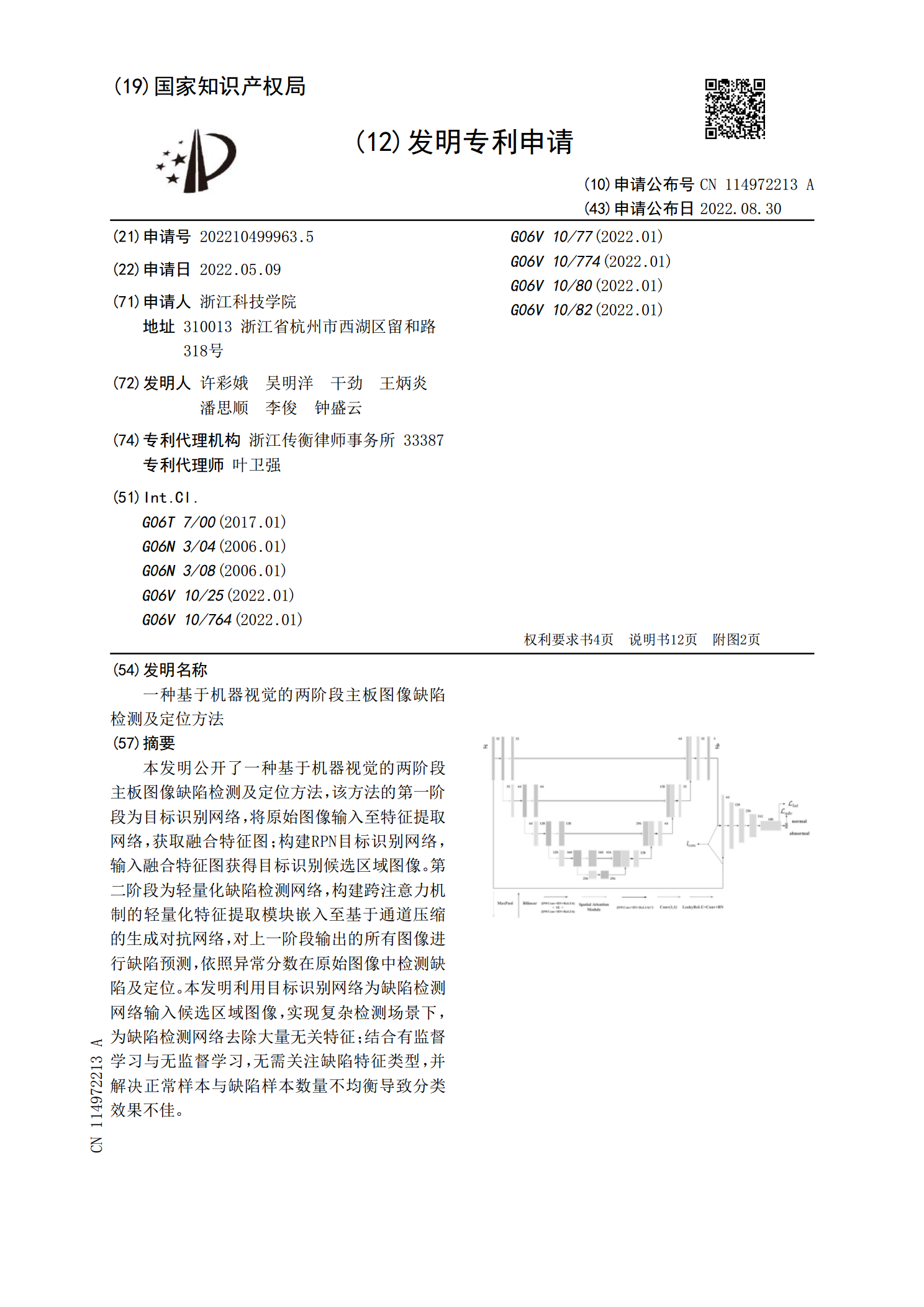
本发明公开了一种基于机器视觉的两阶段主板图像缺陷检测及定位方法,该方法的第一阶段为目标识别网络,将原始图像输入至特征提取网络,获取融合特征图;构建RPN目标识别网络,输入融合特征图获得目标识别候选区域图像。第二阶段为轻量化缺陷检测网络,构建跨注意力机制的轻量化特征提取模块嵌入至基于通道压缩的生成对抗网络,对上一阶段输出的所有图像进行缺陷预测,依照异常分数在原始图像中检测缺陷及定位。本发明利用目标识别网络为缺陷检测网络输入候选区域图像,实现复杂检测场景下,为缺陷检测网络去除大量无关特征;结合有监督学习与无监

基于机器视觉的工件缺陷检测方法.pdf
本发明提供了一种基于机器视觉的工件缺陷检测方法。该方法首先采集法兰盘式工件的图像,对相机进行标定,获取标定误差,然后对工件轮廓进行亚像素边缘信息的提取,计算出拟合边缘到工件轮廓的距离,并通过比较该距离是否大于所给阈值判别工件外轮廓的破损情况,最后针对工件表面纹理复杂影响工件表面划痕与锈蚀分割的问题,采用基于像素分层采样的PixelNet卷积神经网络对表面缺陷进行分割。结果表明,本发明可以准确地检测出工件的外形缺陷和表面缺陷,并提高了算法鲁棒性。
一种基于机器视觉的图像追踪定位方法及系统.pdf
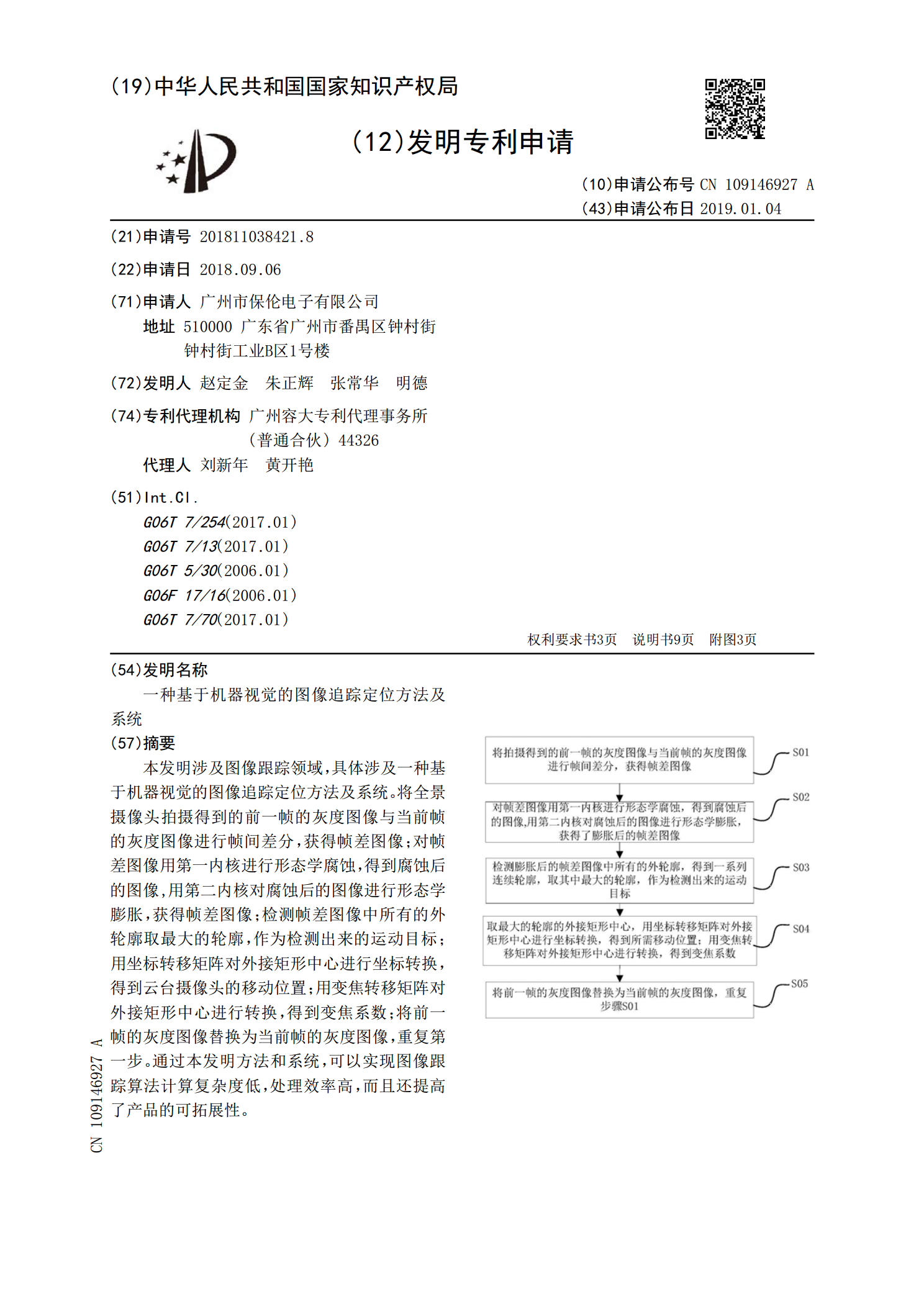
本发明涉及图像跟踪领域,具体涉及一种基于机器视觉的图像追踪定位方法及系统。将全景摄像头拍摄得到的前一帧的灰度图像与当前帧的灰度图像进行帧间差分,获得帧差图像;对帧差图像用第一内核进行形态学腐蚀,得到腐蚀后的图像,用第二内核对腐蚀后的图像进行形态学膨胀,获得帧差图像;检测帧差图像中所有的外轮廓取最大的轮廓,作为检测出来的运动目标;用坐标转移矩阵对外接矩形中心进行坐标转换,得到云台摄像头的移动位置;用变焦转移矩阵对外接矩形中心进行转换,得到变焦系数;将前一帧的灰度图像替换为当前帧的灰度图像,重复第一步。通过本
一种基于机器视觉的仪表旋钮定位与检测方法.pdf
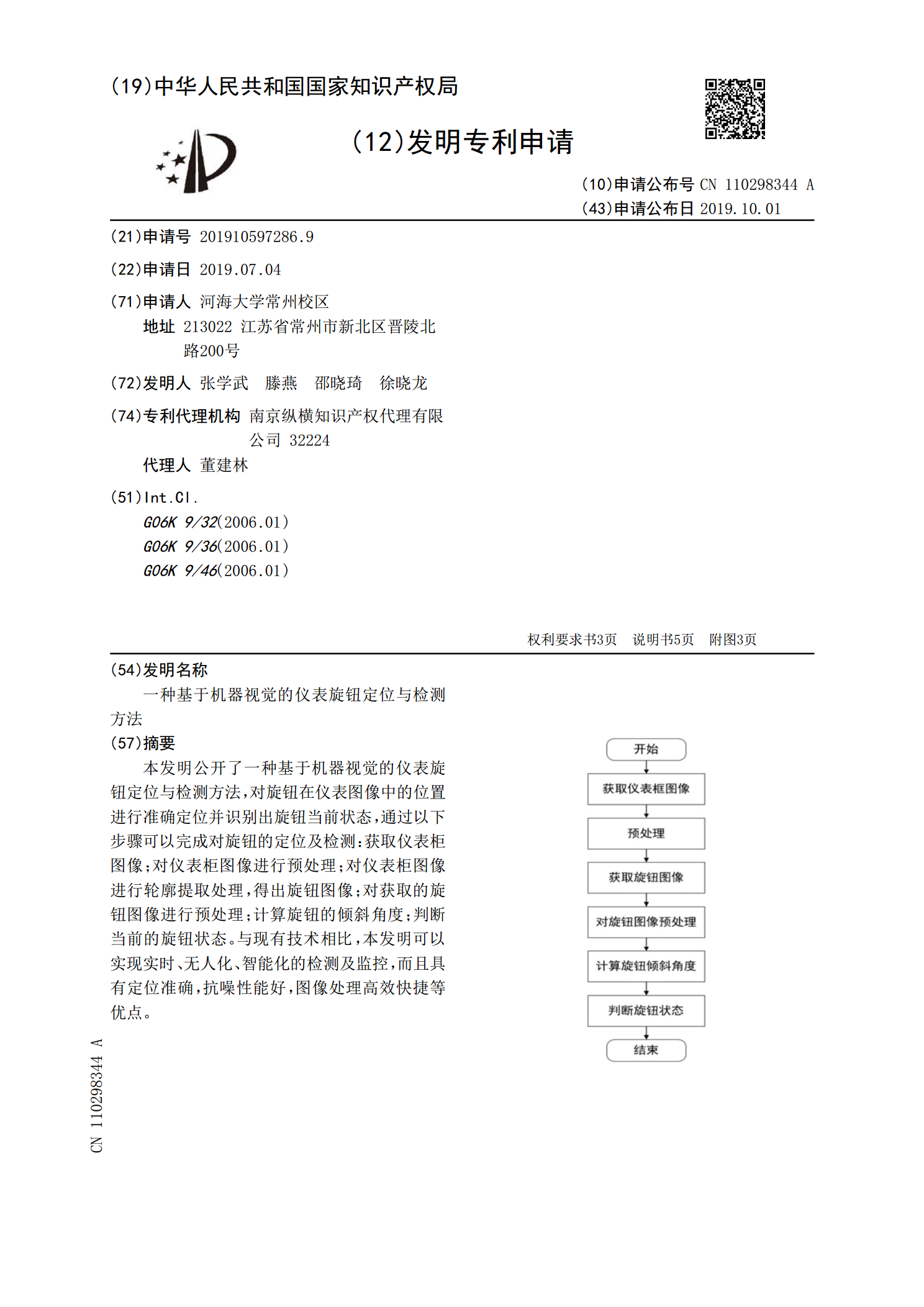
本发明公开了一种基于机器视觉的仪表旋钮定位与检测方法,对旋钮在仪表图像中的位置进行准确定位并识别出旋钮当前状态,通过以下步骤可以完成对旋钮的定位及检测:获取仪表柜图像;对仪表柜图像进行预处理;对仪表柜图像进行轮廓提取处理,得出旋钮图像;对获取的旋钮图像进行预处理;计算旋钮的倾斜角度;判断当前的旋钮状态。与现有技术相比,本发明可以实现实时、无人化、智能化的检测及监控,而且具有定位准确,抗噪性能好,图像处理高效快捷等优点。

一种基于机器视觉的汽车齿轮成品缺陷检测方法.pdf
本发明公开了一种基于机器视觉的汽车齿轮成品缺陷检测方法。针对当前采样数字化图像处理技术对汽车齿轮部件缺陷识别精度不高的问题。本发明利用数字图像处理技术对齿轮等零部件轮廓以及边缘部分进行提取,然后将提取后的齿轮边界图像作为先验信息融入改进的UNet网络结构中,进行人为地补充底层特征信息作为网络训练的参考,从而达到更好的信息融合效果。本发明基于UNet网络结构对齿轮图像语义进行分割,能够完全识别出细小的裂缝、污迹等缺陷。