
一种基于机器视觉的仪表旋钮定位与检测方法.pdf

涵蓄****09

1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的仪表旋钮定位与检测方法.pdf
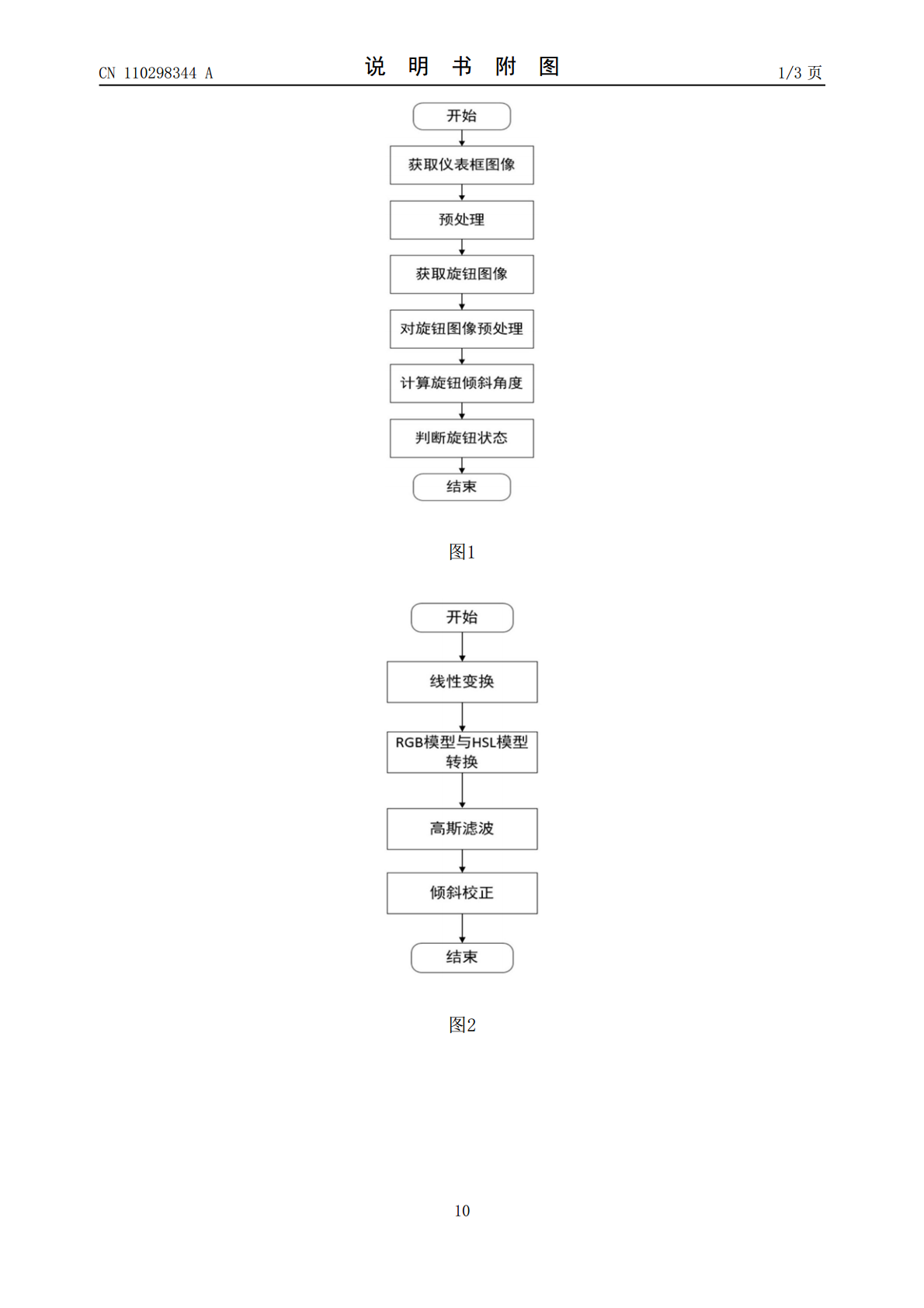
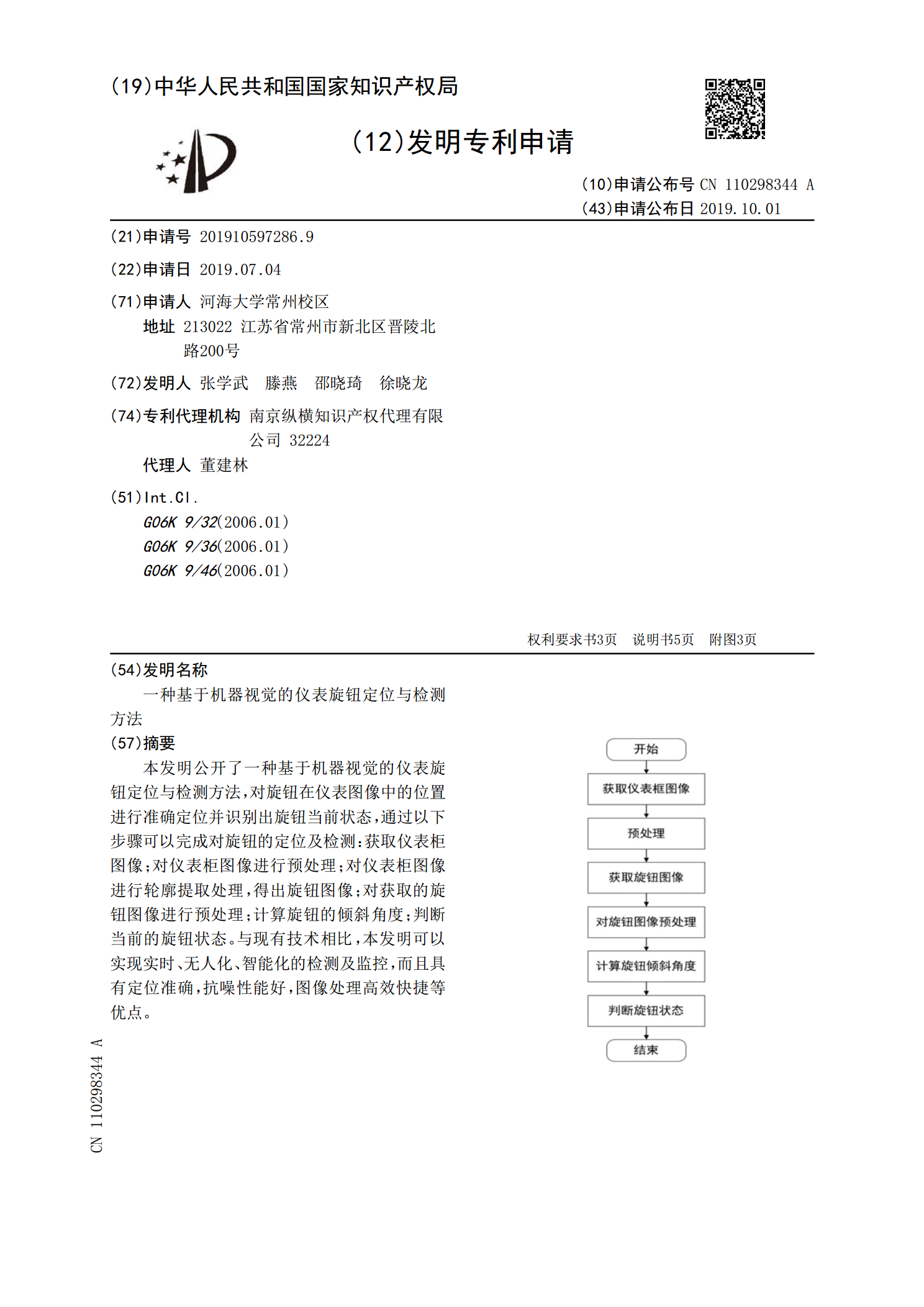
本发明公开了一种基于机器视觉的仪表旋钮定位与检测方法,对旋钮在仪表图像中的位置进行准确定位并识别出旋钮当前状态,通过以下步骤可以完成对旋钮的定位及检测:获取仪表柜图像;对仪表柜图像进行预处理;对仪表柜图像进行轮廓提取处理,得出旋钮图像;对获取的旋钮图像进行预处理;计算旋钮的倾斜角度;判断当前的旋钮状态。与现有技术相比,本发明可以实现实时、无人化、智能化的检测及监控,而且具有定位准确,抗噪性能好,图像处理高效快捷等优点。

一种基于机器视觉的指针式仪表定位与识别方法.pdf
本发明公开了一种基于机器视觉的指针式仪表定位与识别方法,对仪表盘在仪表柜图像中的位置进行准确定位并自动识别仪表读数,(1)获取仪表柜图像;(2)将仪表柜图像进行分割处理,得出仪表盘图像;(3)对仪表盘图像进行预处理;(4)使用Canny边缘检测法获得仪表盘图像中所有的边缘轮廓;(5)在获得的边缘轮廓中用Hough变换找到所有直线轮廓,(6)通过直线轮廓的长度特征筛选出仪表盘中指针所在的直线轮廓;(7)计算指针所在两条直线轮廓倾斜角的平均值θ;(7)由直线倾角和仪表刻度之间的线性关系计算出指针读数。通过采用
一种基于机器视觉的玻璃定位检测装置.pdf
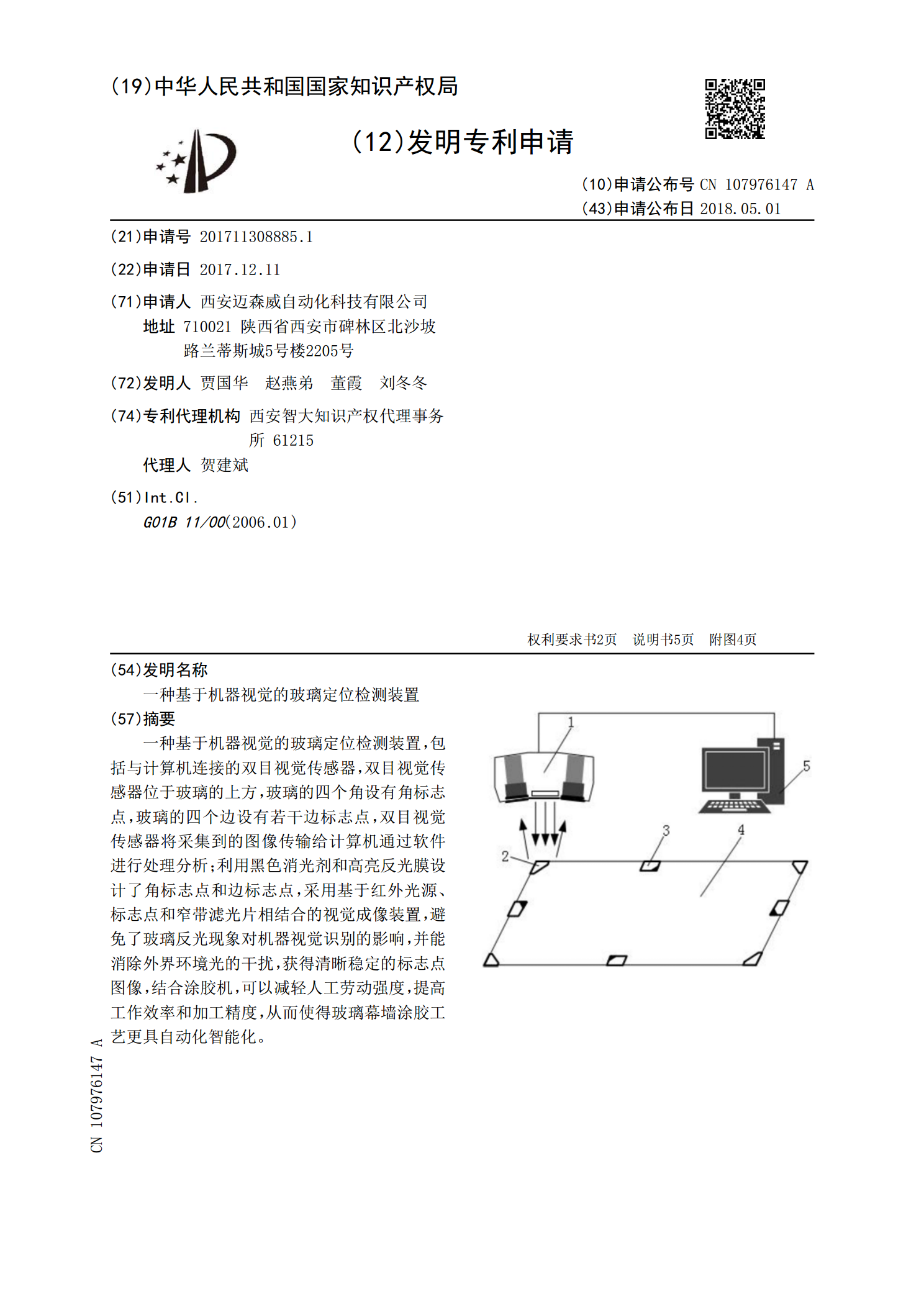
一种基于机器视觉的玻璃定位检测装置,包括与计算机连接的双目视觉传感器,双目视觉传感器位于玻璃的上方,玻璃的四个角设有角标志点,玻璃的四个边设有若干边标志点,双目视觉传感器将采集到的图像传输给计算机通过软件进行处理分析;利用黑色消光剂和高亮反光膜设计了角标志点和边标志点,采用基于红外光源、标志点和窄带滤光片相结合的视觉成像装置,避免了玻璃反光现象对机器视觉识别的影响,并能消除外界环境光的干扰,获得清晰稳定的标志点图像,结合涂胶机,可以减轻人工劳动强度,提高工作效率和加工精度,从而使得玻璃幕墙涂胶工艺更具自动
一种基于机器视觉的棒料圆心定位方法.pdf
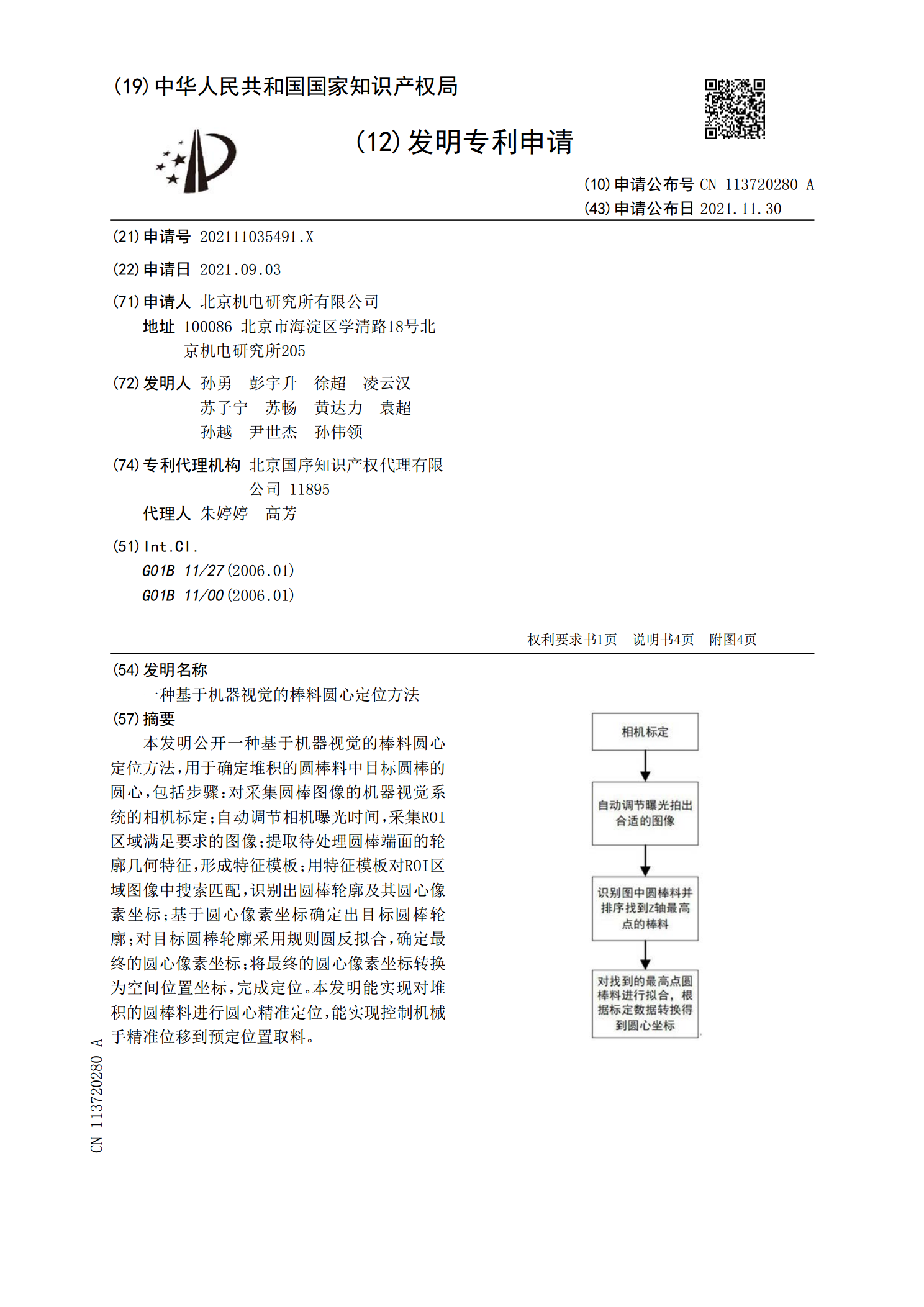
本发明公开一种基于机器视觉的棒料圆心定位方法,用于确定堆积的圆棒料中目标圆棒的圆心,包括步骤:对采集圆棒图像的机器视觉系统的相机标定;自动调节相机曝光时间,采集ROI区域满足要求的图像;提取待处理圆棒端面的轮廓几何特征,形成特征模板;用特征模板对ROI区域图像中搜索匹配,识别出圆棒轮廓及其圆心像素坐标;基于圆心像素坐标确定出目标圆棒轮廓;对目标圆棒轮廓采用规则圆反拟合,确定最终的圆心像素坐标;将最终的圆心像素坐标转换为空间位置坐标,完成定位。本发明能实现对堆积的圆棒料进行圆心精准定位,能实现控制机械手精准

一种基于机器视觉的工件定位方法及装置.pdf
本发明涉及智能机器人技术领域,具体涉及一种基于机器视觉的工件定位方法及装置,首先确定目标工件,采集Kinect相机拍摄的图像,检测所述图像中包含所述目标工件图像的预测框;进而根据所述预测框的回归坐标确定所述目标工件的轮廓,以及目标工件中心点的二维坐标;接着获取所述Kinect相机的标定参数,根据所述标定参数和所述目标工件中心点的二维坐标得出目标工件中心点的三维坐标;最后将所述目标工件的轮廓和所述目标工件中心点的三维坐标作为目标工件的定位结果,本发明可以对工件进行准确的识别与定位。