
一种基于机器视觉的图像追踪定位方法及系统.pdf

一吃****新冬

1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的图像追踪定位方法及系统.pdf
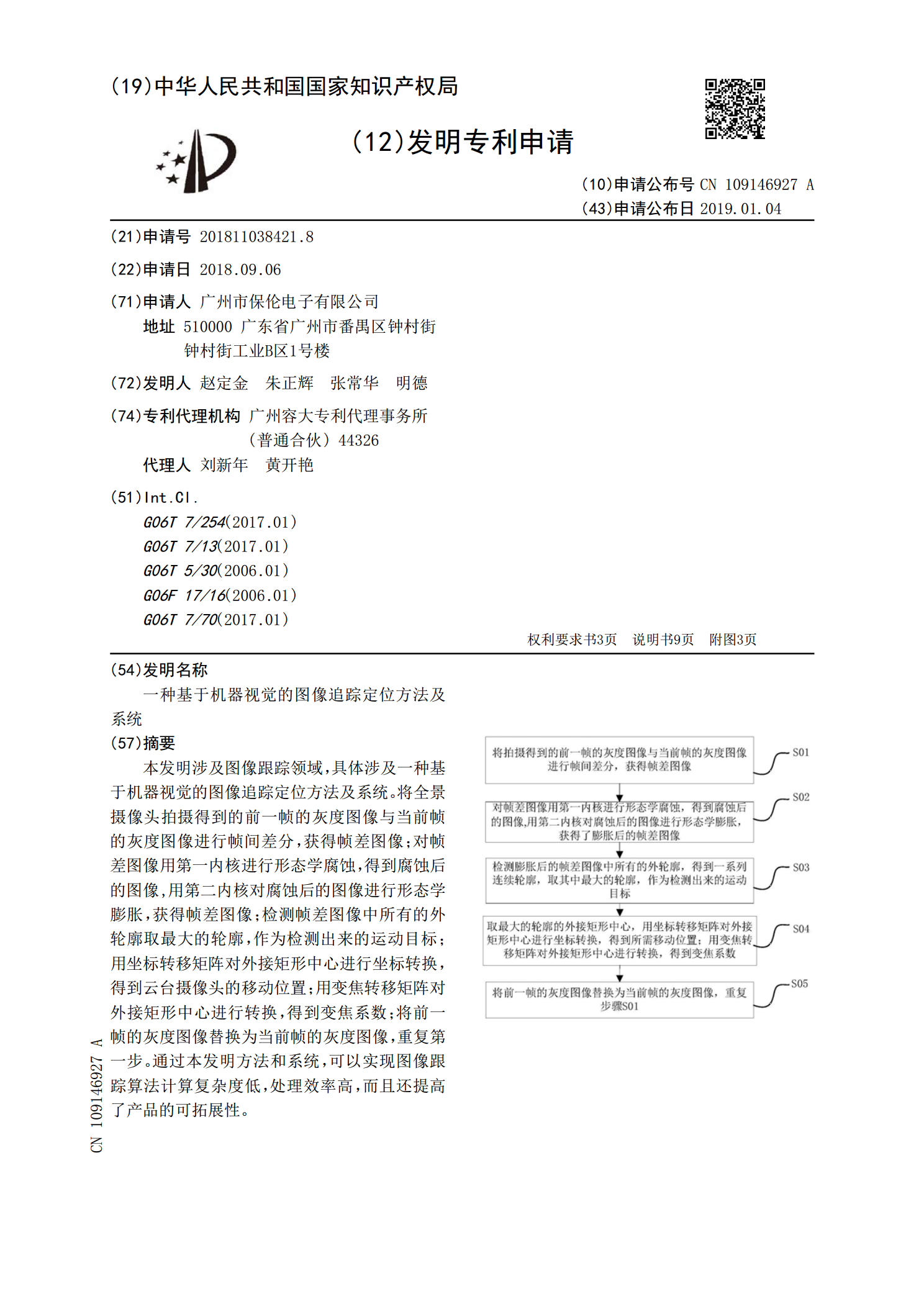
本发明涉及图像跟踪领域,具体涉及一种基于机器视觉的图像追踪定位方法及系统。将全景摄像头拍摄得到的前一帧的灰度图像与当前帧的灰度图像进行帧间差分,获得帧差图像;对帧差图像用第一内核进行形态学腐蚀,得到腐蚀后的图像,用第二内核对腐蚀后的图像进行形态学膨胀,获得帧差图像;检测帧差图像中所有的外轮廓取最大的轮廓,作为检测出来的运动目标;用坐标转移矩阵对外接矩形中心进行坐标转换,得到云台摄像头的移动位置;用变焦转移矩阵对外接矩形中心进行转换,得到变焦系数;将前一帧的灰度图像替换为当前帧的灰度图像,重复第一步。通过本
一种基于深度学习的机器视觉定位支架及系统及定位方法.pdf
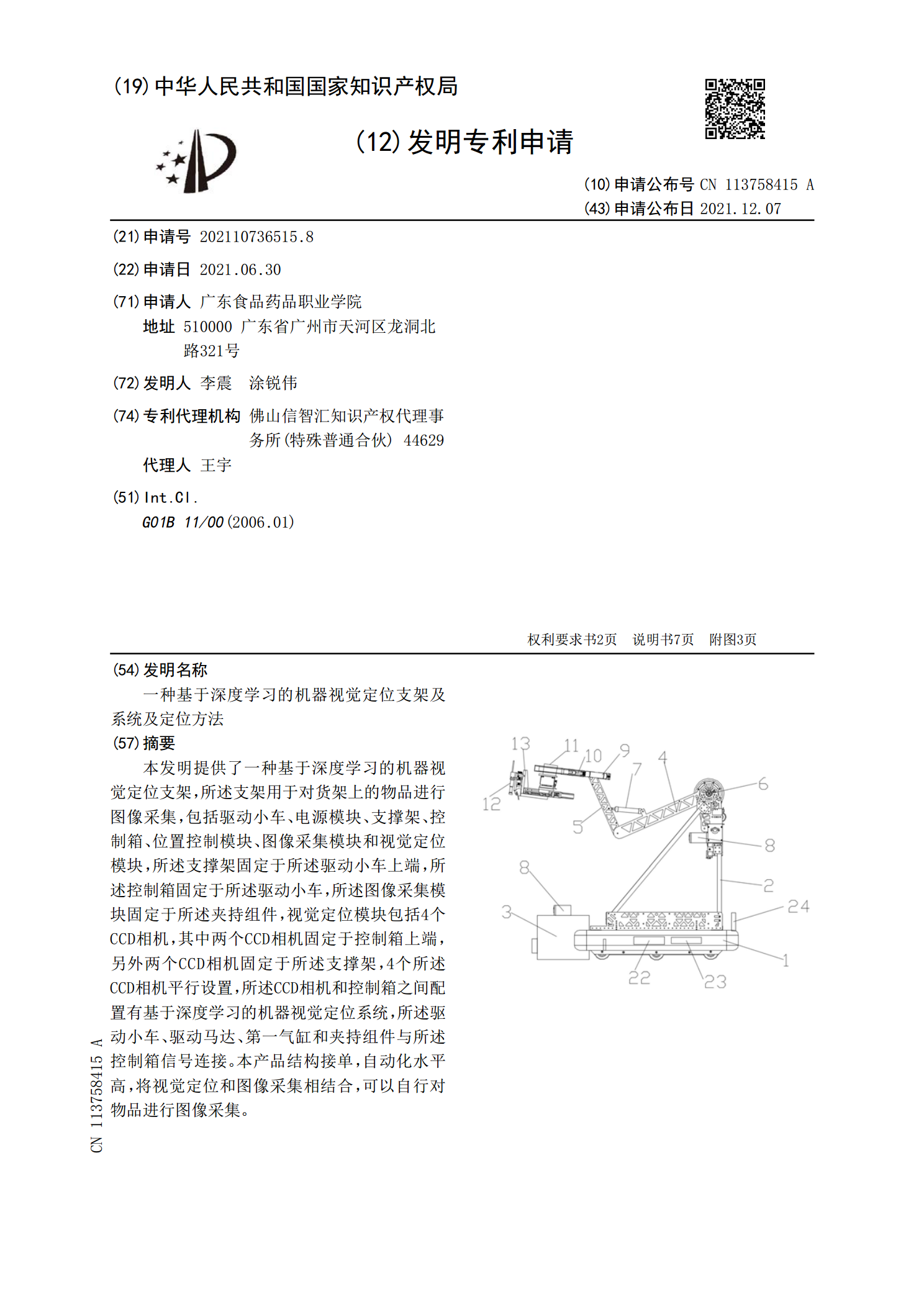
本发明提供了一种基于深度学习的机器视觉定位支架,所述支架用于对货架上的物品进行图像采集,包括驱动小车、电源模块、支撑架、控制箱、位置控制模块、图像采集模块和视觉定位模块,所述支撑架固定于所述驱动小车上端,所述控制箱固定于所述驱动小车,所述图像采集模块固定于所述夹持组件,视觉定位模块包括4个CCD相机,其中两个CCD相机固定于控制箱上端,另外两个CCD相机固定于所述支撑架,4个所述CCD相机平行设置,所述CCD相机和控制箱之间配置有基于深度学习的机器视觉定位系统,所述驱动小车、驱动马达、第一气缸和夹持组件与

基于移动视觉的破拆机器人目标追踪定位系统的研究.doc
基于移动视觉的破拆机器人目标追踪定位系统的研究移动机器人目标追踪定位已经成为机器人领域的研究热点。但目前对破拆机器人破拆目标追踪定位的研究尚处于空白。人工手动破拆极易引发碎石飞溅、坍塌,容易造成二次灾害。开展对破拆机器人目标追踪定位系统研究,使破拆机器人具备追踪定位破拆目标并自主移动至目标附近调整破拆臂位姿实施破拆任务功能的研究意义很大。通过对破拆机器人目标追踪定位原理分析得出:在破拆机器人移动过程中,防止目标的丢失、保持摄像头始终正对目标是实现破拆机器人自主定位破拆目标的关键。为此,本课题针对实现破拆机

基于机器视觉的实时定位系统.docx
基于机器视觉的实时定位系统基于机器视觉的实时定位系统摘要:机器视觉的快速发展和广泛应用为实时定位系统提供了新的机会和挑战。实时定位系统是一种能够准确测量和跟踪物体位置的技术,这对许多领域而言至关重要,包括自动驾驶汽车、无人机、机器人导航等。本论文将介绍基于机器视觉的实时定位系统的原理、方法和应用,以及当前的研究状况和未来的发展方向。1.引言实时定位系统是指利用传感器和算法来确定物体在三维空间中的位置。传统的定位系统通常依赖于全球定位系统(GPS)或惯性导航系统,但在某些情况下,这些系统可能无法提供足够的精

基于机器视觉的点胶机定位系统.docx
基于机器视觉的点胶机定位系统基于机器视觉的点胶机定位系统摘要:随着科技的不断发展,机器视觉技术逐渐应用于各个领域。点胶机定位系统作为一种典型的应用,具有广泛的应用前景。本文主要介绍了基于机器视觉的点胶机定位系统的原理、方法和实现,并对其优点及存在的问题进行了分析和讨论。关键词:机器视觉,点胶机,定位系统,图像处理1.引言随着工业生产的智能化和自动化水平的不断提高,点胶机作为一种常见的工业设备,具有重要的应用价值。然而,由于传统的机械定位方法存在精度不高、易受环境影响等问题,因此基于机器视觉的点胶机定位系统