
定位方法、定位装置、计算机设备及计算机可读存储介质.pdf

安双****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
定位方法、定位装置、计算机设备及计算机可读存储介质.pdf
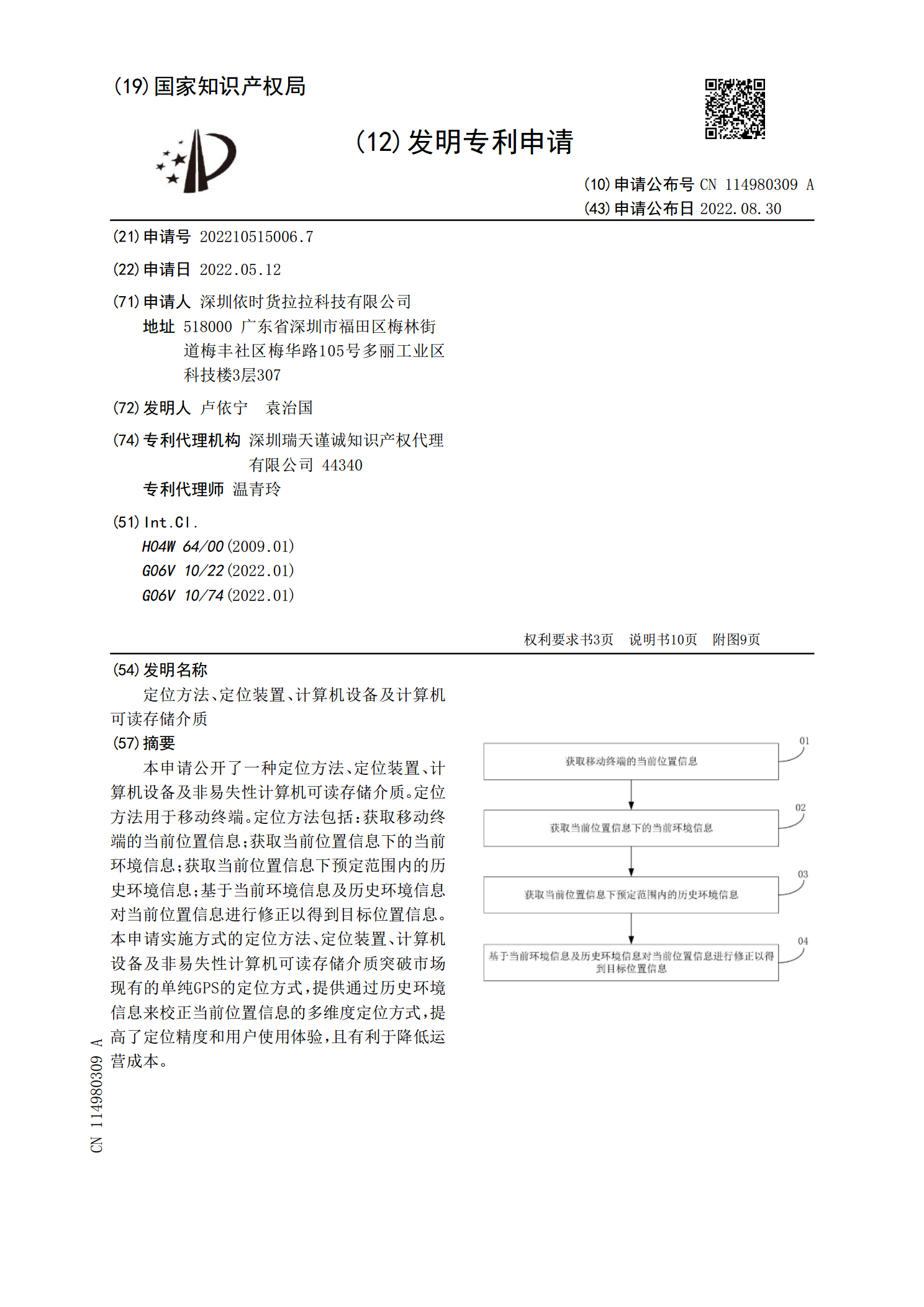
本申请公开了一种定位方法、定位装置、计算机设备及非易失性计算机可读存储介质。定位方法用于移动终端。定位方法包括:获取移动终端的当前位置信息;获取当前位置信息下的当前环境信息;获取当前位置信息下预定范围内的历史环境信息;基于当前环境信息及历史环境信息对当前位置信息进行修正以得到目标位置信息。本申请实施方式的定位方法、定位装置、计算机设备及非易失性计算机可读存储介质突破市场现有的单纯GPS的定位方式,提供通过历史环境信息来校正当前位置信息的多维度定位方式,提高了定位精度和用户使用体验,且有利于降低运营成本。
定位方法、装置及计算机可读存储介质.pdf
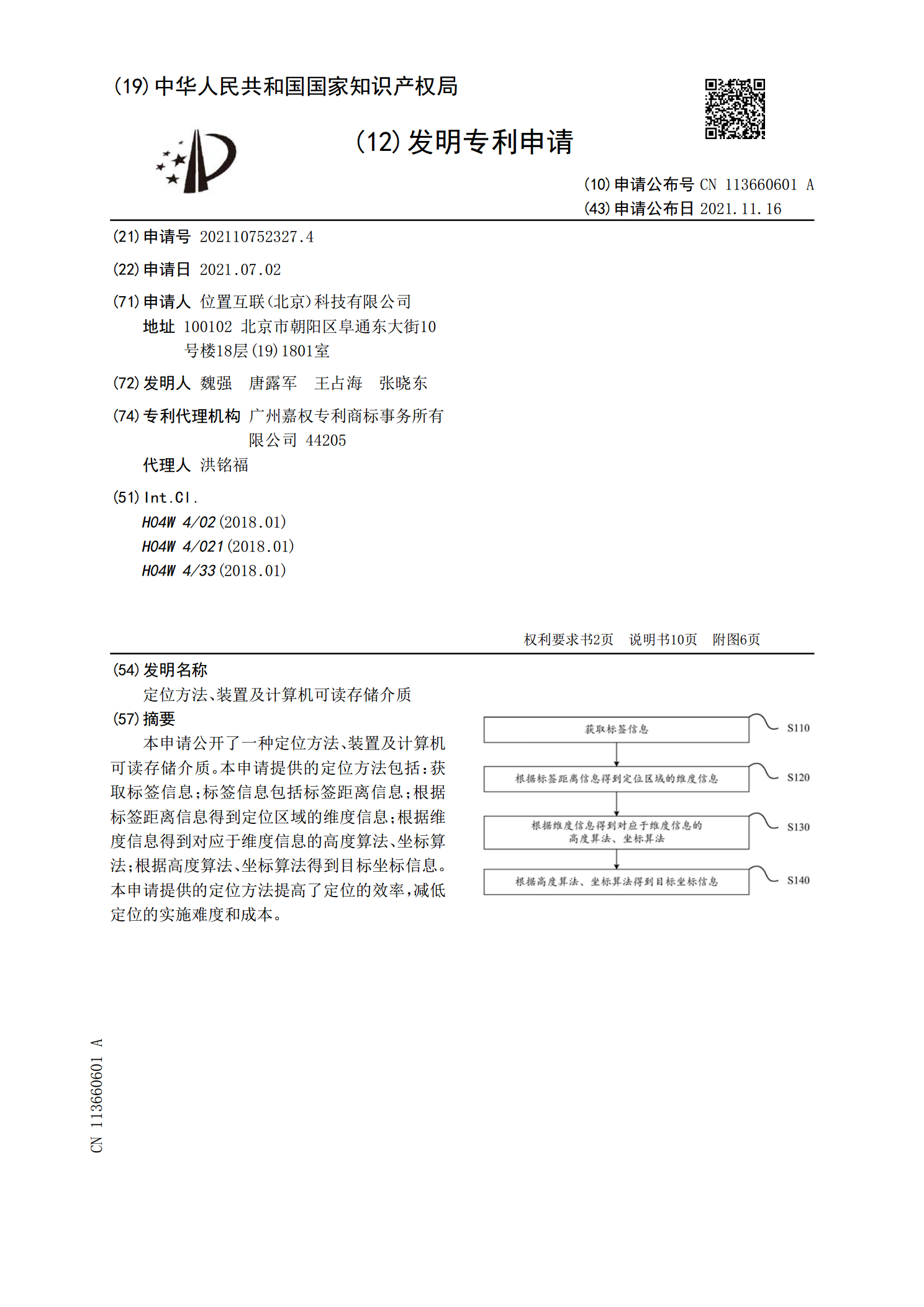
本申请公开了一种定位方法、装置及计算机可读存储介质。本申请提供的定位方法包括:获取标签信息;标签信息包括标签距离信息;根据标签距离信息得到定位区域的维度信息;根据维度信息得到对应于维度信息的高度算法、坐标算法;根据高度算法、坐标算法得到目标坐标信息。本申请提供的定位方法提高了定位的效率,减低定位的实施难度和成本。
定位方法、定位装置、计算机可读存储介质和定位系统.pdf
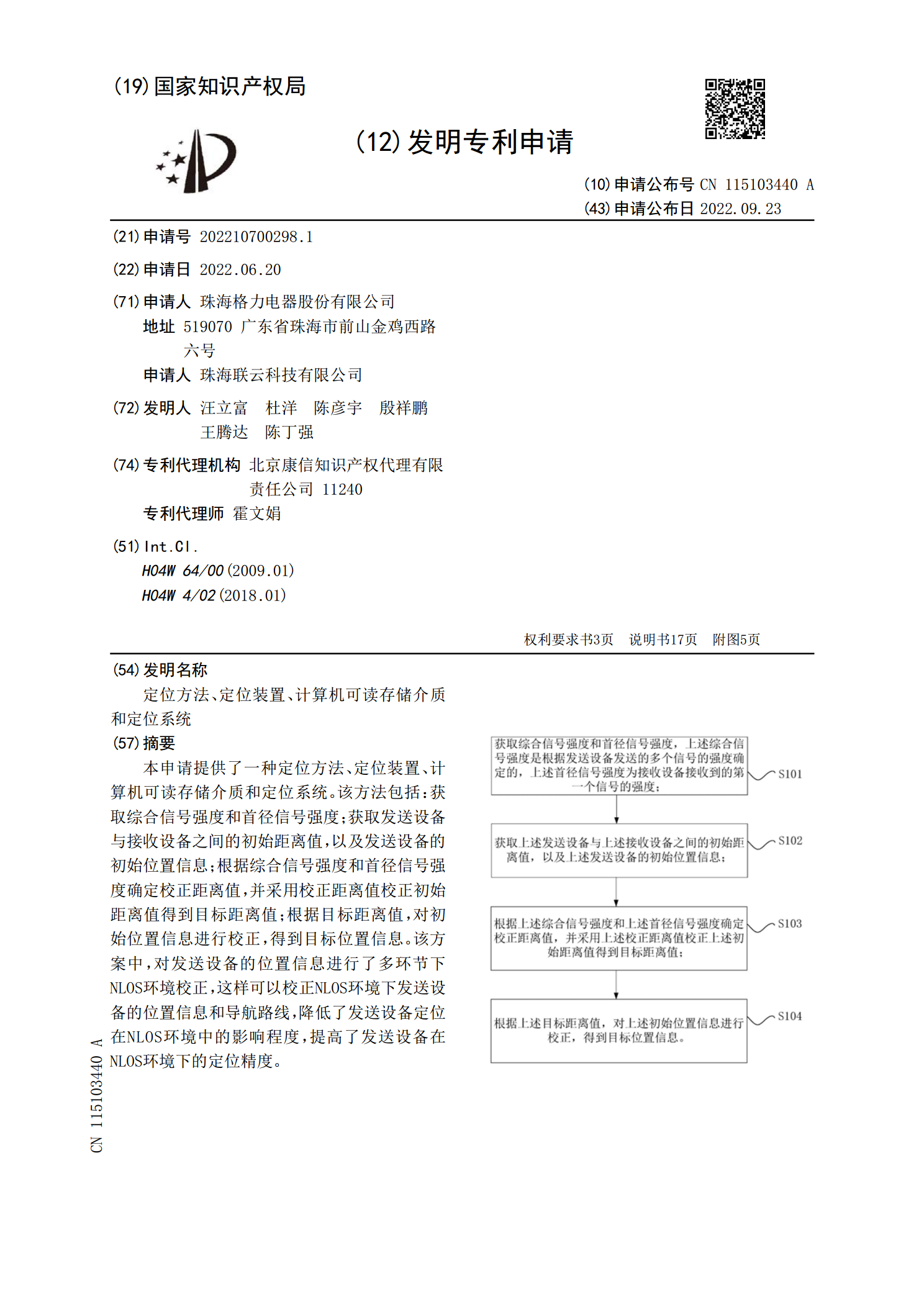
本申请提供了一种定位方法、定位装置、计算机可读存储介质和定位系统。该方法包括:获取综合信号强度和首径信号强度;获取发送设备与接收设备之间的初始距离值,以及发送设备的初始位置信息;根据综合信号强度和首径信号强度确定校正距离值,并采用校正距离值校正初始距离值得到目标距离值;根据目标距离值,对初始位置信息进行校正,得到目标位置信息。该方案中,对发送设备的位置信息进行了多环节下NLOS环境校正,这样可以校正NLOS环境下发送设备的位置信息和导航路线,降低了发送设备定位在NLOS环境中的影响程度,提高了发送设备在N
底盘定位方法、装置、设备及计算机可读存储介质.pdf
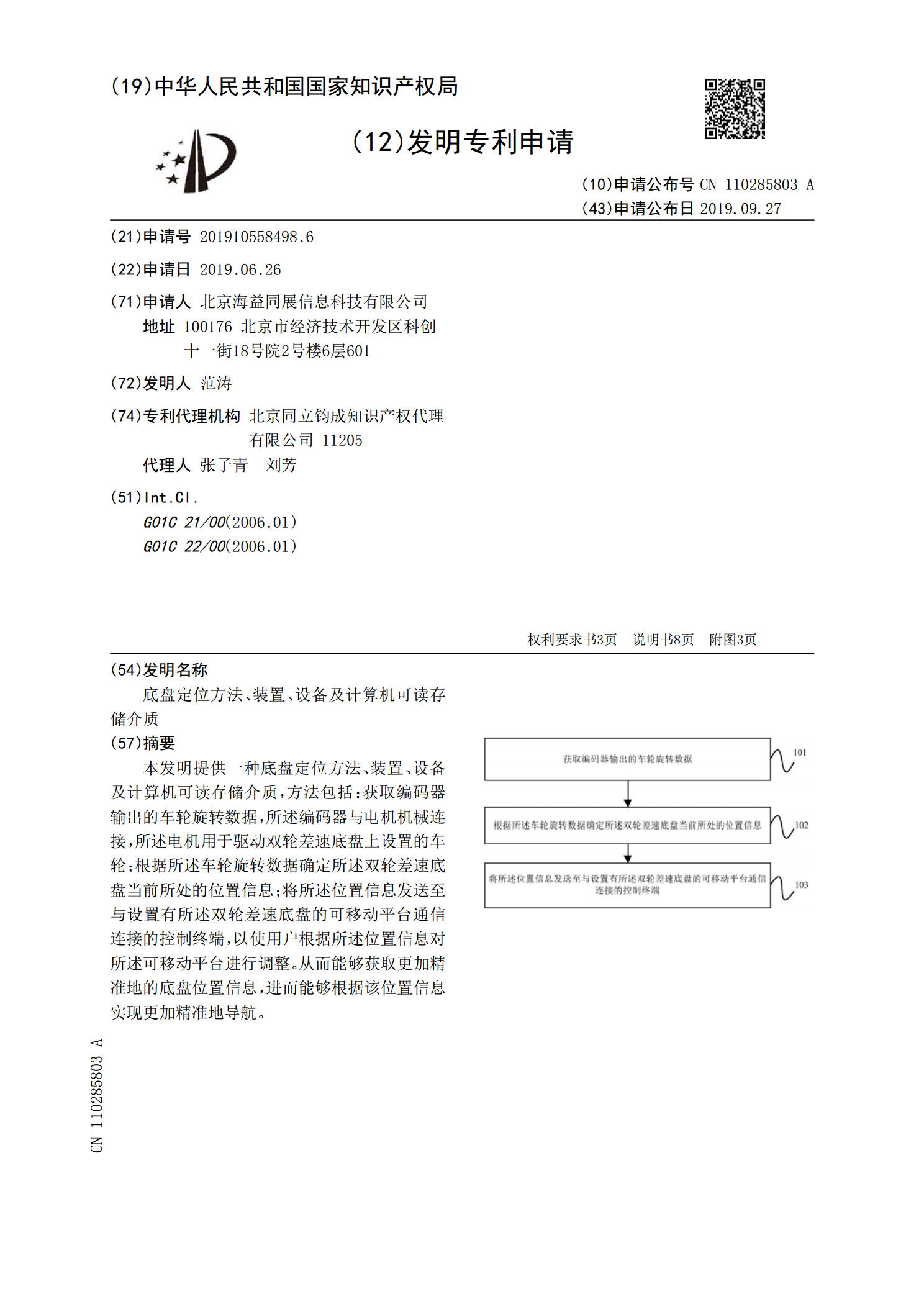
本发明提供一种底盘定位方法、装置、设备及计算机可读存储介质,方法包括:获取编码器输出的车轮旋转数据,所述编码器与电机机械连接,所述电机用于驱动双轮差速底盘上设置的车轮;根据所述车轮旋转数据确定所述双轮差速底盘当前所处的位置信息;将所述位置信息发送至与设置有所述双轮差速底盘的可移动平台通信连接的控制终端,以使用户根据所述位置信息对所述可移动平台进行调整。从而能够获取更加精准地的底盘位置信息,进而能够根据该位置信息实现更加精准地导航。

室内定位方法、装置、设备及计算机可读存储介质.pdf
本发明公开了一种室内定位方法、装置、设备及计算机可读存储介质,室内定位方法包括:采集室内环境中的位置指纹数据,并根据所述位置指纹数据中的位置信息确定有标签数据和无标签数据;将所述无标签数据输入至预设的生成对抗网络进行训练,得到预训练参数;将所述有标签数据和所述预训练参数输入至预设的预测模型进行训练,得到预测参数,根据所述预测参数确定目标位置。本发明提高了室内空间定位的准确性。