
车辆识别方法、装置、设备和存储介质.pdf

猫巷****忠娟

1/10

2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆识别方法、装置、设备和存储介质.pdf
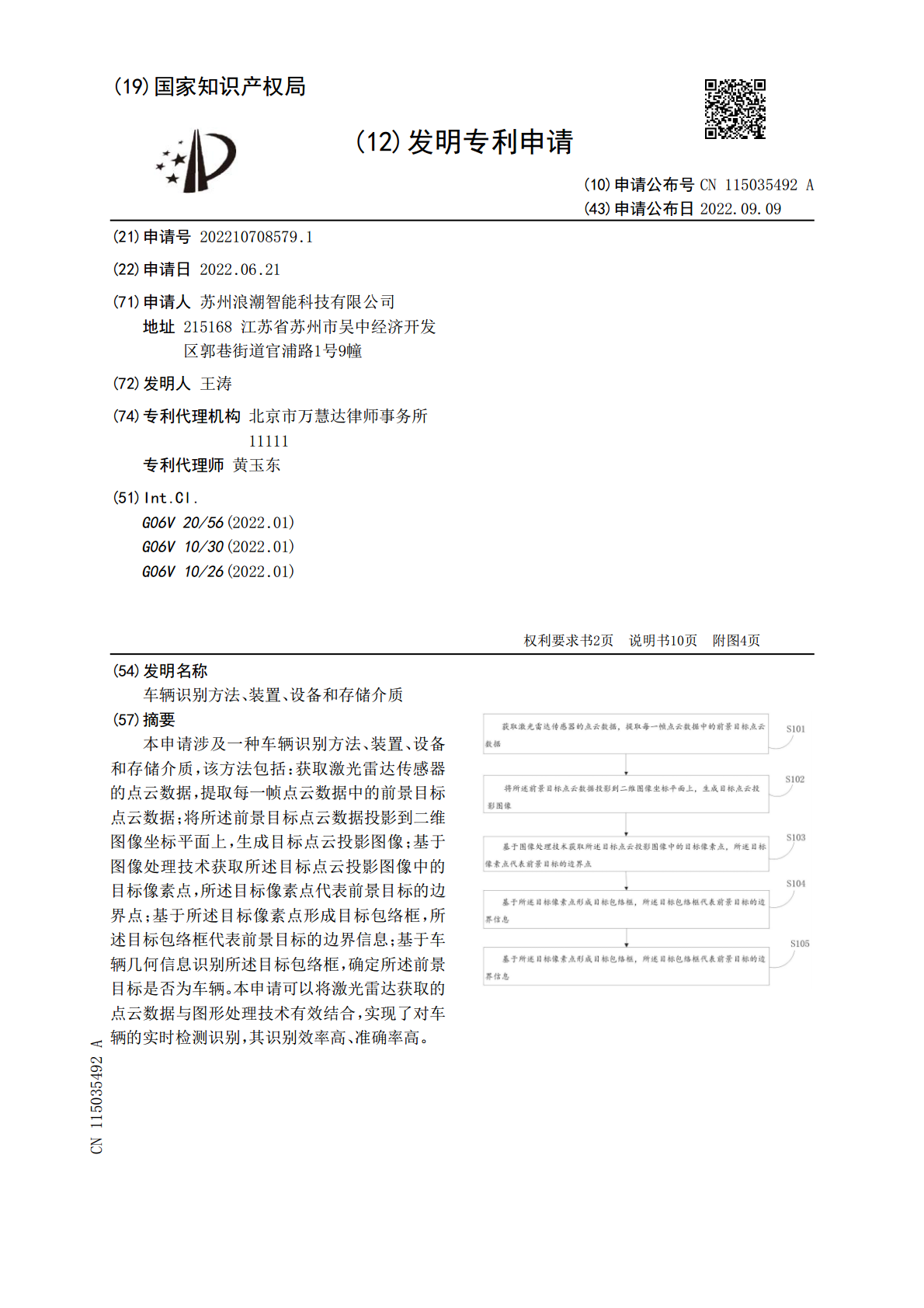
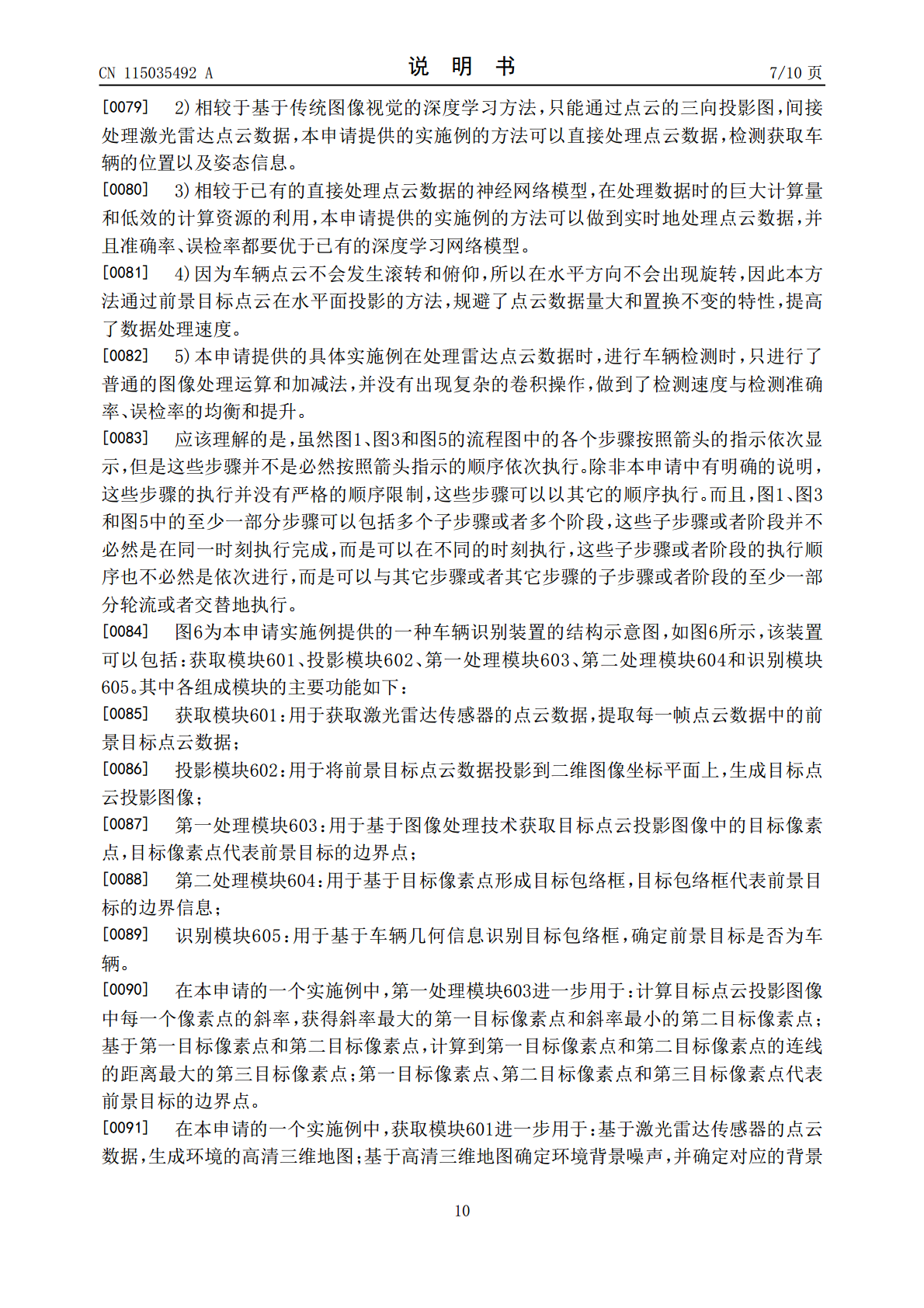
本申请涉及一种车辆识别方法、装置、设备和存储介质,该方法包括:获取激光雷达传感器的点云数据,提取每一帧点云数据中的前景目标点云数据;将所述前景目标点云数据投影到二维图像坐标平面上,生成目标点云投影图像;基于图像处理技术获取所述目标点云投影图像中的目标像素点,所述目标像素点代表前景目标的边界点;基于所述目标像素点形成目标包络框,所述目标包络框代表前景目标的边界信息;基于车辆几何信息识别所述目标包络框,确定所述前景目标是否为车辆。本申请可以将激光雷达获取的点云数据与图形处理技术有效结合,实现了对车辆的实时检测

车辆识别方法、装置、设备和存储介质.pdf
本发明实施例提供一种车辆识别方法、装置、设备和存储介质,该方法包括:获取包含目标车辆的图像;通过第一模型对图像进行特征提取以得到第一图像特征;通过第二模型对图像进行特征提取以得到第二图像特征,第一模型能够识别的车辆类别是第一类别,第二模型的训练样本图像中所包含车辆属于第二类别,第一类别与第二类别匹配。融合第一图像特征和第二图像特征以得到第三图像特征,根据第三图像特征确定目标对象的类别,以保证图像中目标车辆的类别被准确识别。
车辆识别方法、装置、设备及存储介质.pdf
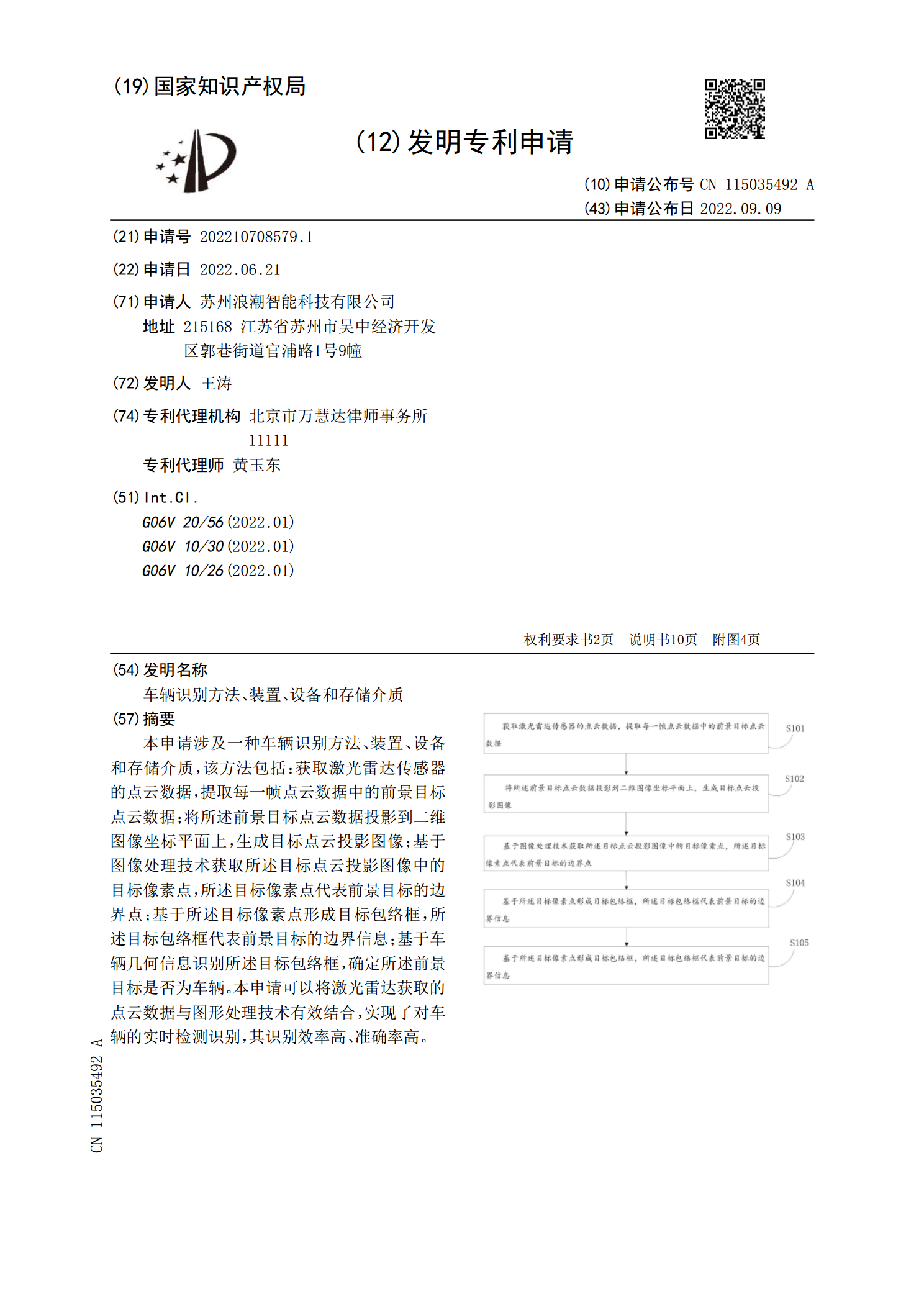
本申请实施例公开了一种车辆识别方法、装置、设备及存储介质,其中,所述方法包括:获取画面包括停放在预设区域内的车辆的待识别视频;确定所述待识别视频中包括的至少两辆已标记车辆;在对所述至少两辆已标记车辆的车牌号识别失败的情况下,基于每一已标记车辆的跟踪标记,确定每一所述已标记车辆在所述预设区域的停放时间;确定每一所述已标记车辆在所述待识别视频的视频帧中的位置信息;基于所述停放时间和所述位置信息,在所述至少两辆已标记车辆中,确定信息采集存在中断的目标车辆。
车辆状态的识别方法、装置、设备及存储介质.pdf
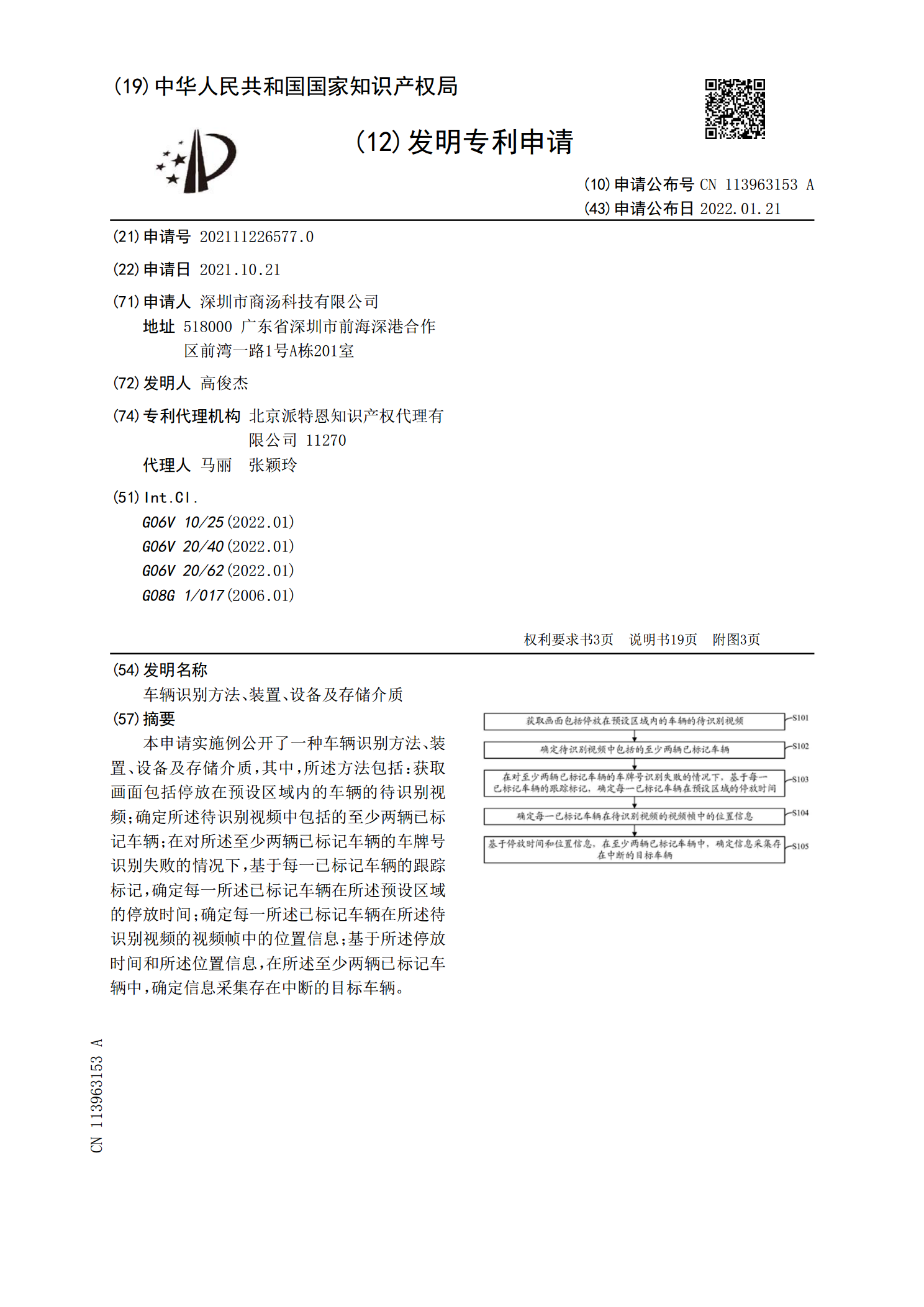
本申请提供一种车辆状态的识别方法、装置、设备及存储介质,该方法包括:获取第一通信数据集,第一通信数据集包括M个通信数据,M个通信数据与M个测量时间一一对应,M个通信数据中每个通信数据用于指示目标车辆在对应测量时间的服务小区以及目标车辆在对应测量时间所在时间段内的位置区,M为正整数;根据目标车辆在M个测量时间的服务小区和位置区的变化情况确定目标车辆在M个测量时间的运动状态,从而实现提高对车辆状态识别的准确率的目的。

车辆运输模式识别方法、装置、设备和存储介质.pdf
本发明实施例公开了一种车辆运输模式识别方法、装置、设备和存储介质。该方法包括:依据目标车辆的历史行驶轨迹数据,确定所述目标车辆的候选停留点;依据停留点、城市及区域之间的从属关系,对所述候选停留点进行分层聚类,确定停留点聚类结果;依据所述停留点聚类结果,确定所述目标车辆的运输模式。本发明实施例在随机且零散分布的停留点的基础上,通过对车辆的历史行驶轨迹数据进行大数据分析,对车辆途径停留点进行分层聚类,实现了车辆运输模式的有效确定,提高了车辆分析的效率和准确率,降低了车辆分析成本和人力投入,为车辆的在线配货提供