
逆行障碍物识别方法、装置、设备及存储介质.pdf

听容****55


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
逆行障碍物识别方法、装置、设备及存储介质.pdf
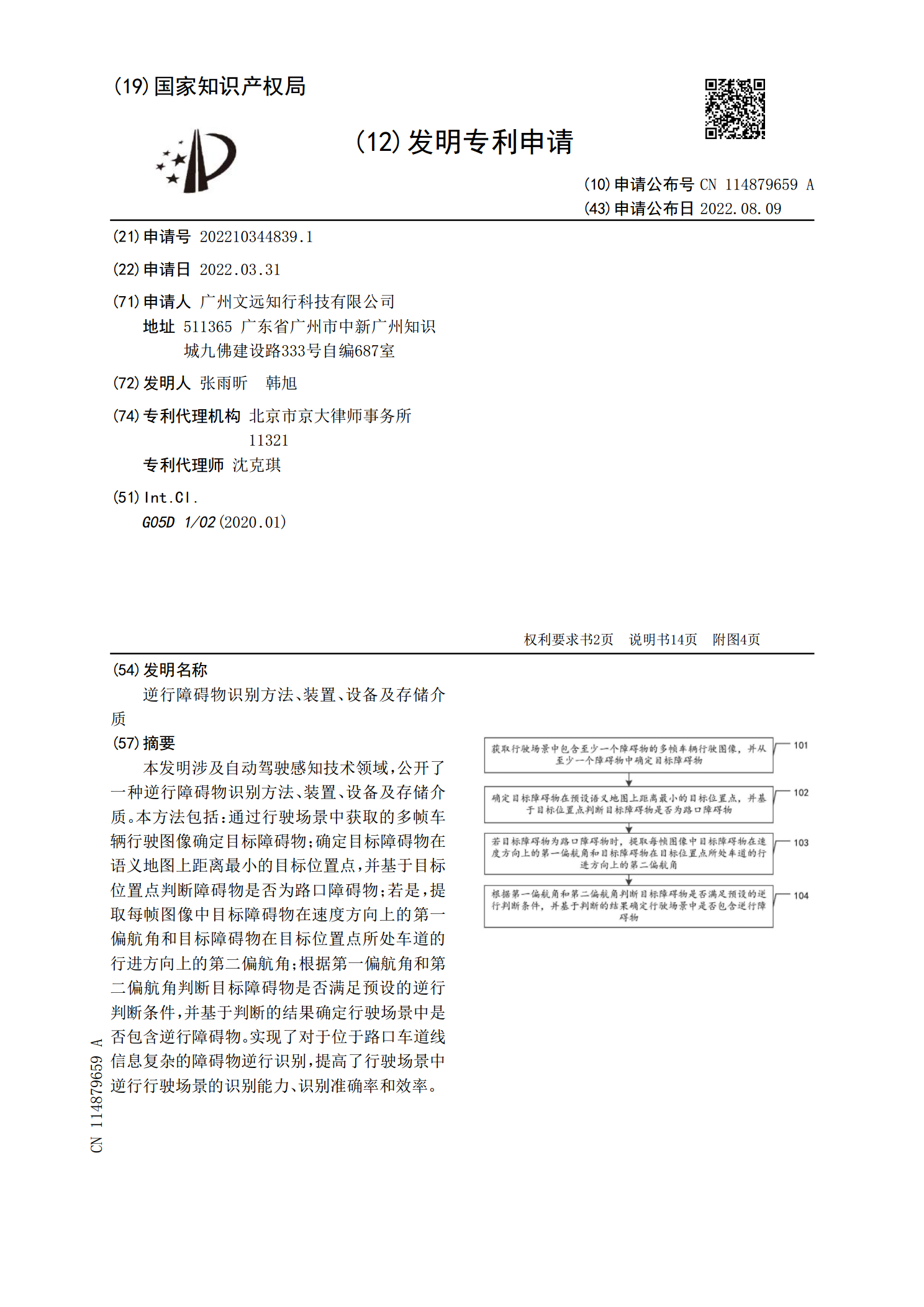
本发明涉及自动驾驶感知技术领域,公开了一种逆行障碍物识别方法、装置、设备及存储介质。本方法包括:通过行驶场景中获取的多帧车辆行驶图像确定目标障碍物;确定目标障碍物在语义地图上距离最小的目标位置点,并基于目标位置点判断障碍物是否为路口障碍物;若是,提取每帧图像中目标障碍物在速度方向上的第一偏航角和目标障碍物在目标位置点所处车道的行进方向上的第二偏航角;根据第一偏航角和第二偏航角判断目标障碍物是否满足预设的逆行判断条件,并基于判断的结果确定行驶场景中是否包含逆行障碍物。实现了对于位于路口车道线信息复杂的障碍物
障碍物位置识别方法、装置、终端设备及可读存储介质.pdf
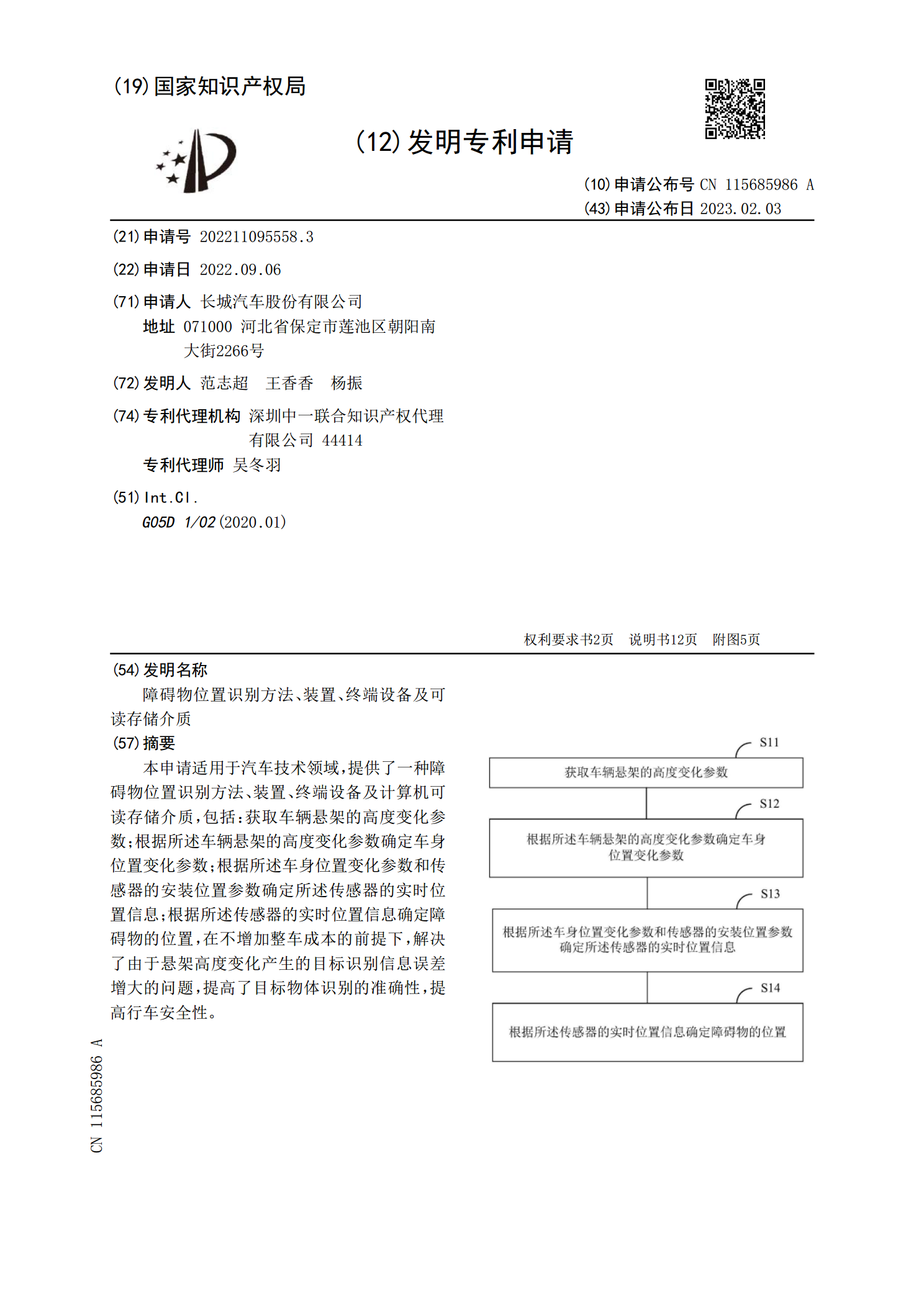
本申请适用于汽车技术领域,提供了一种障碍物位置识别方法、装置、终端设备及计算机可读存储介质,包括:获取车辆悬架的高度变化参数;根据所述车辆悬架的高度变化参数确定车身位置变化参数;根据所述车身位置变化参数和传感器的安装位置参数确定所述传感器的实时位置信息;根据所述传感器的实时位置信息确定障碍物的位置,在不增加整车成本的前提下,解决了由于悬架高度变化产生的目标识别信息误差增大的问题,提高了目标物体识别的准确性,提高行车安全性。
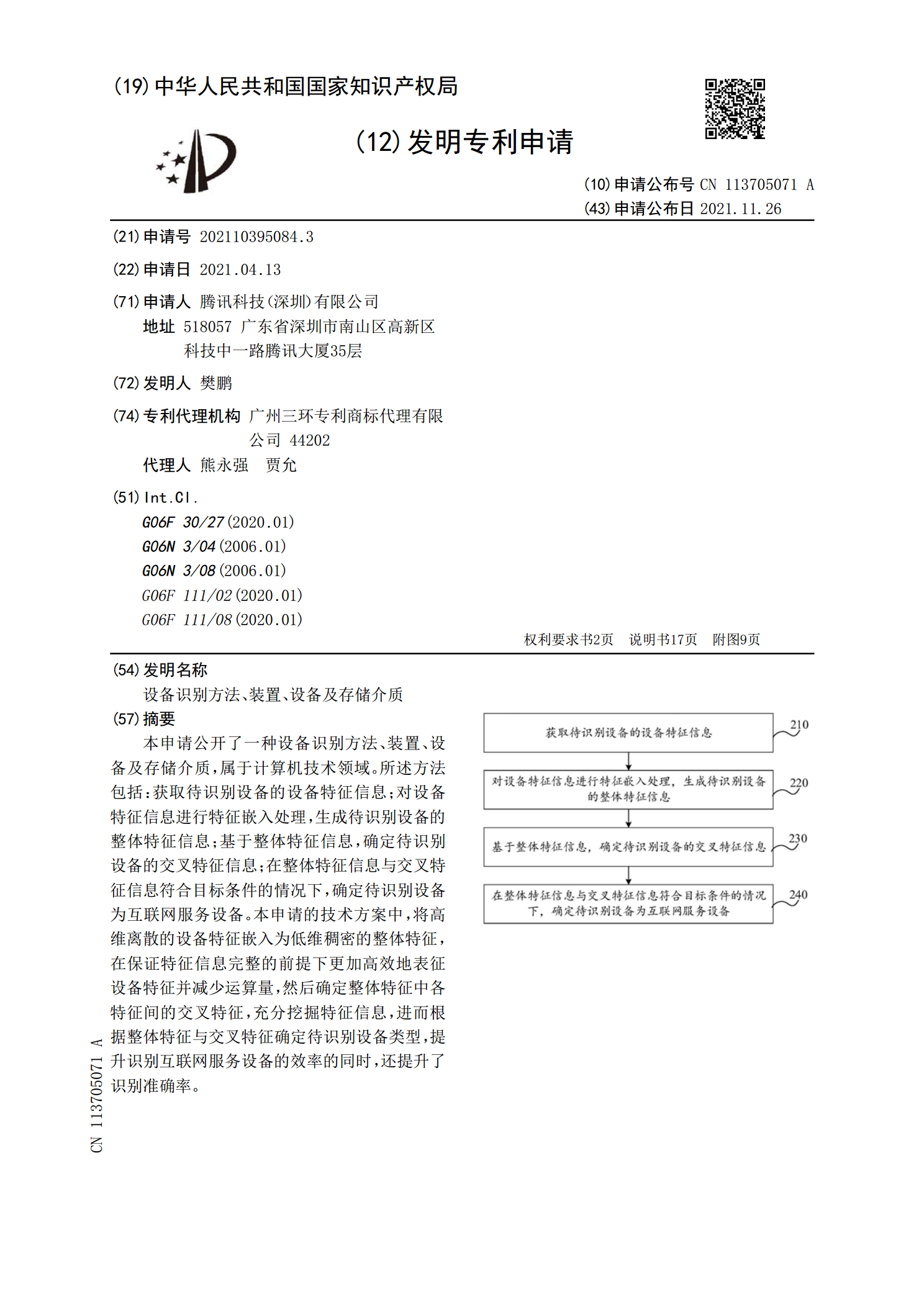
设备识别方法、装置、设备及存储介质.pdf
本申请公开了一种设备识别方法、装置、设备及存储介质,属于计算机技术领域。所述方法包括:获取待识别设备的设备特征信息;对设备特征信息进行特征嵌入处理,生成待识别设备的整体特征信息;基于整体特征信息,确定待识别设备的交叉特征信息;在整体特征信息与交叉特征信息符合目标条件的情况下,确定待识别设备为互联网服务设备。本申请的技术方案中,将高维离散的设备特征嵌入为低维稠密的整体特征,在保证特征信息完整的前提下更加高效地表征设备特征并减少运算量,然后确定整体特征中各特征间的交叉特征,充分挖掘特征信息,进而根据整体特征与

障碍物确定方法、装置、设备以及存储介质.pdf
本发明公开了一种障碍物确定方法、装置、设备以及存储介质。该方法包括:确定目标车辆所处场景的候选障碍物相对于目标车辆的相对位置;根据所述相对位置,以及所述目标车辆所处场景的实际车道线或虚拟车道线,从目标车辆所处场景的候选障碍物中确定目标障碍物。通过上述技术方案,节省了自动驾驶系统的计算资源,可以更快更准确的筛选出感兴趣的目标障碍物,从而增加自动驾驶的安全性。
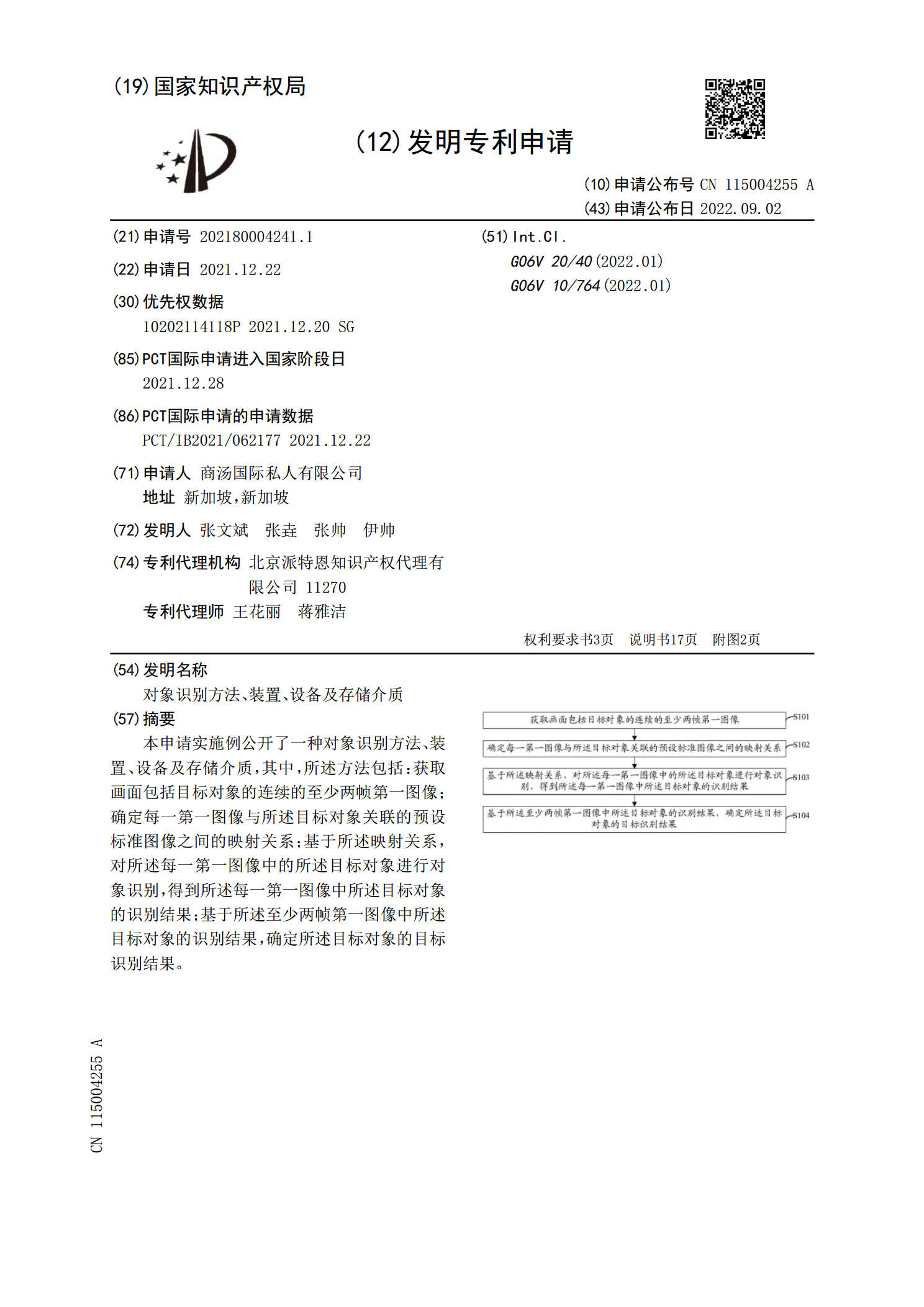
对象识别方法、装置、设备及存储介质.pdf
本申请实施例公开了一种对象识别方法、装置、设备及存储介质,其中,所述方法包括:获取画面包括目标对象的连续的至少两帧第一图像;确定每一第一图像与所述目标对象关联的预设标准图像之间的映射关系;基于所述映射关系,对所述每一第一图像中的所述目标对象进行对象识别,得到所述每一第一图像中所述目标对象的识别结果;基于所述至少两帧第一图像中所述目标对象的识别结果,确定所述目标对象的目标识别结果。