
位置姿态校准方法及装置、测量待测目标的方法、系统.pdf

佳晨****ng


1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
位置姿态校准方法及装置、测量待测目标的方法、系统.pdf
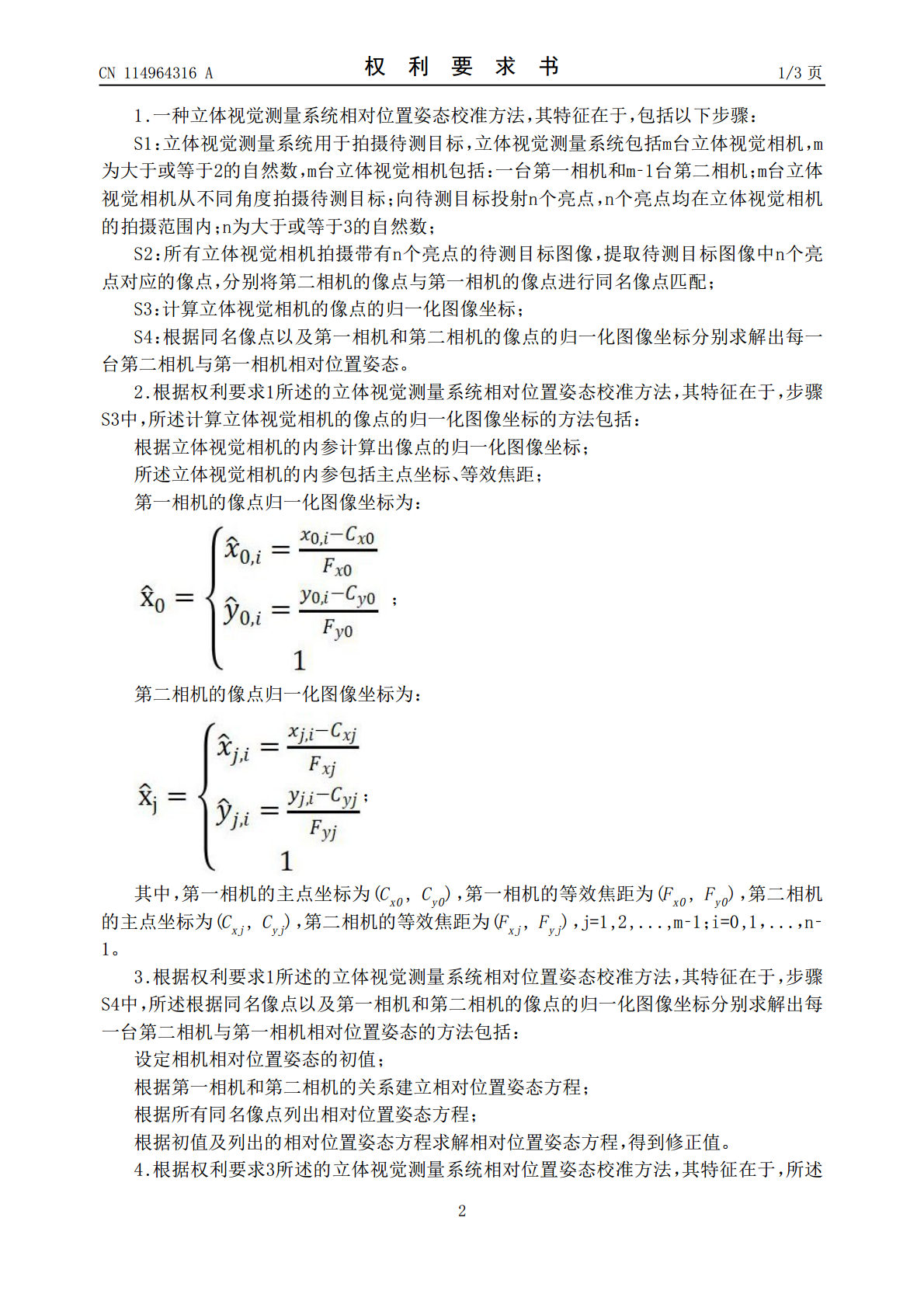
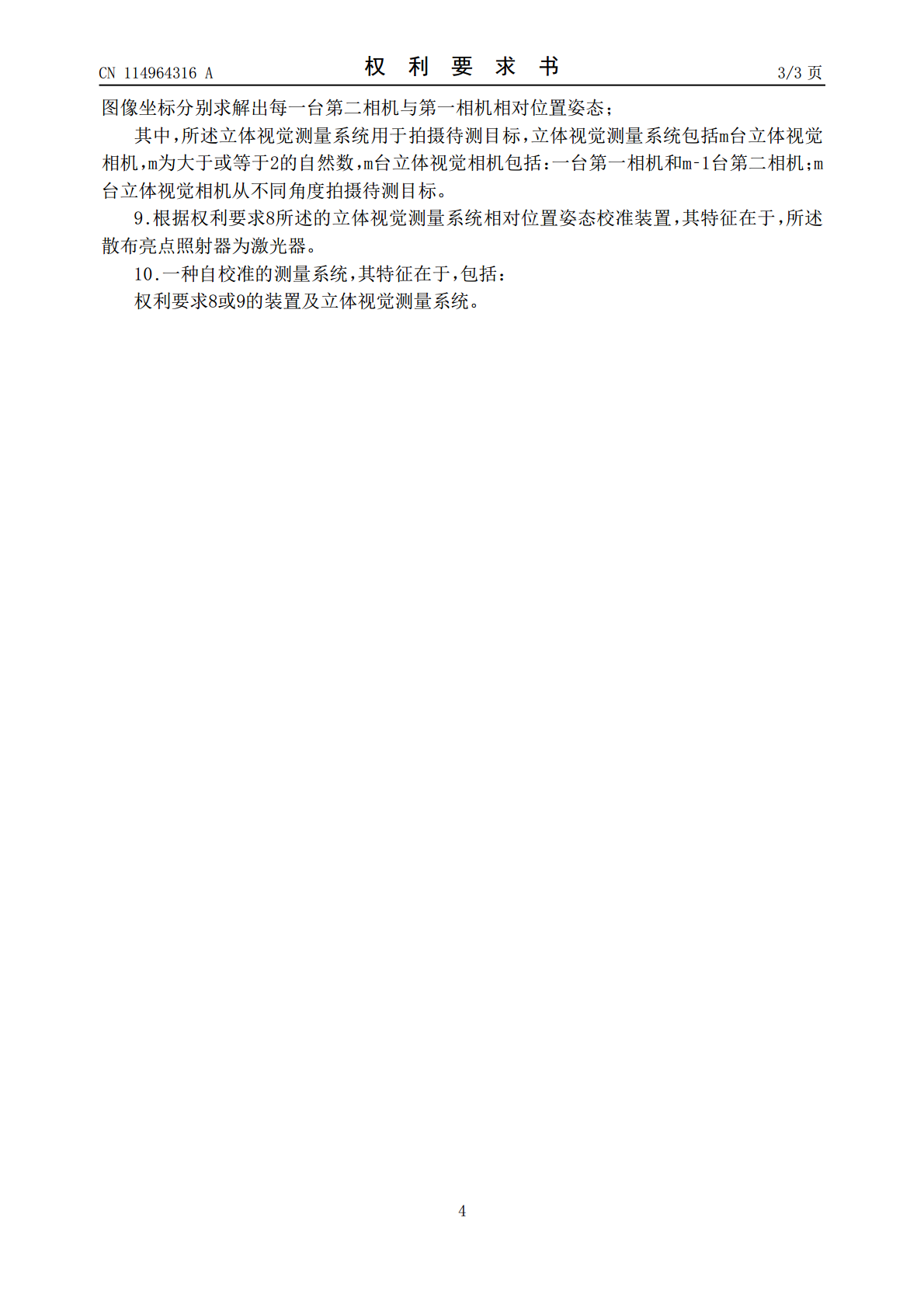
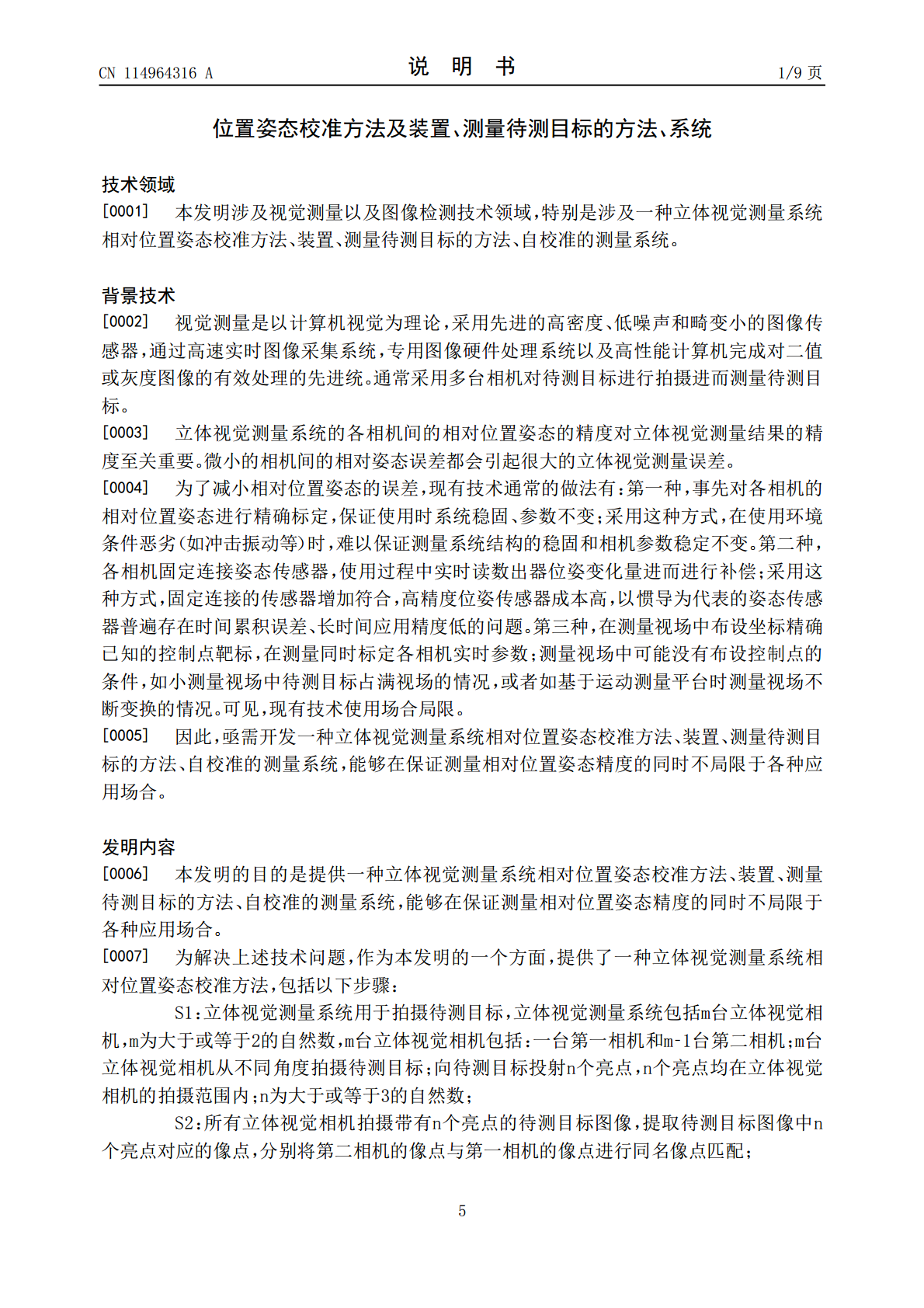
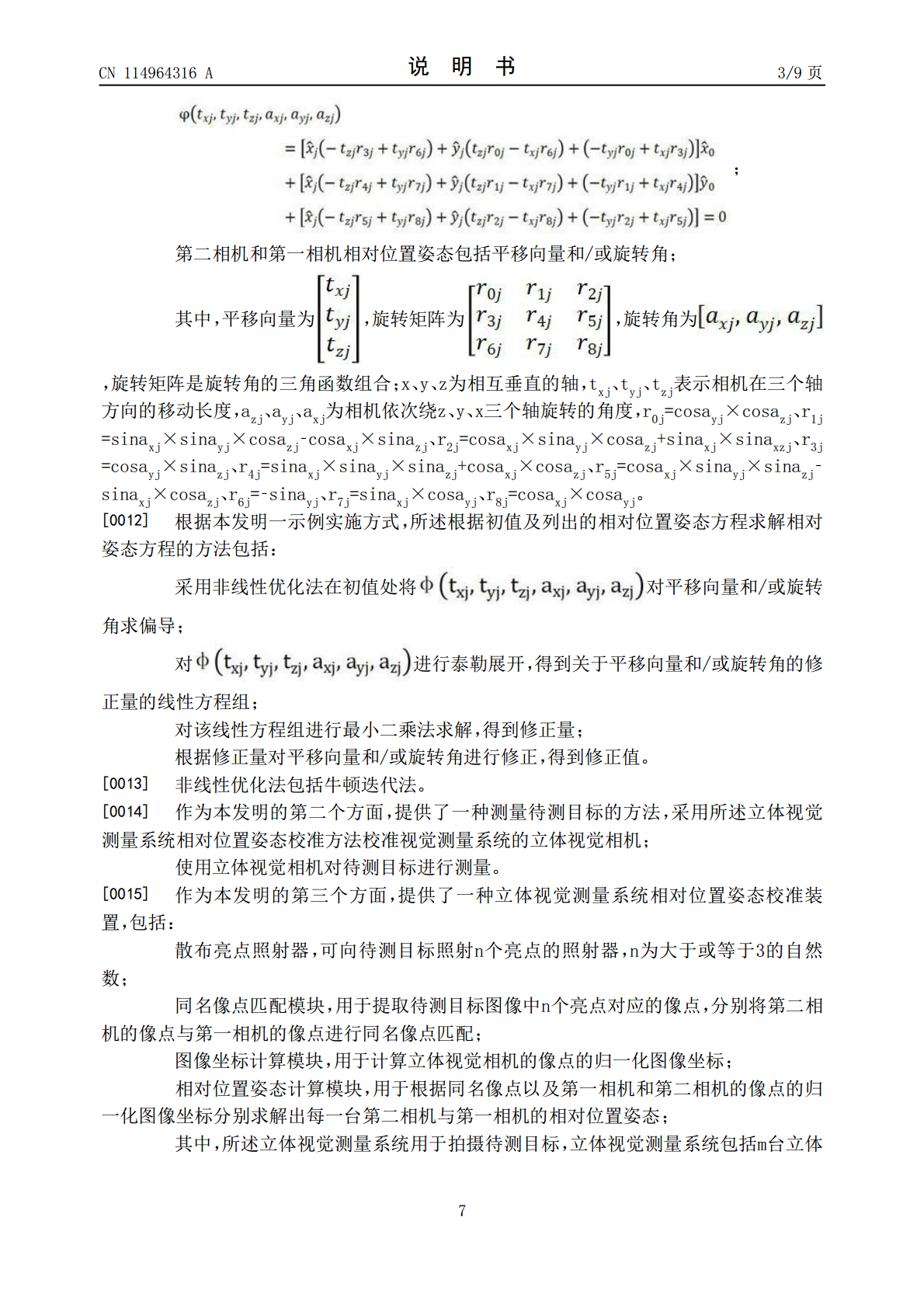
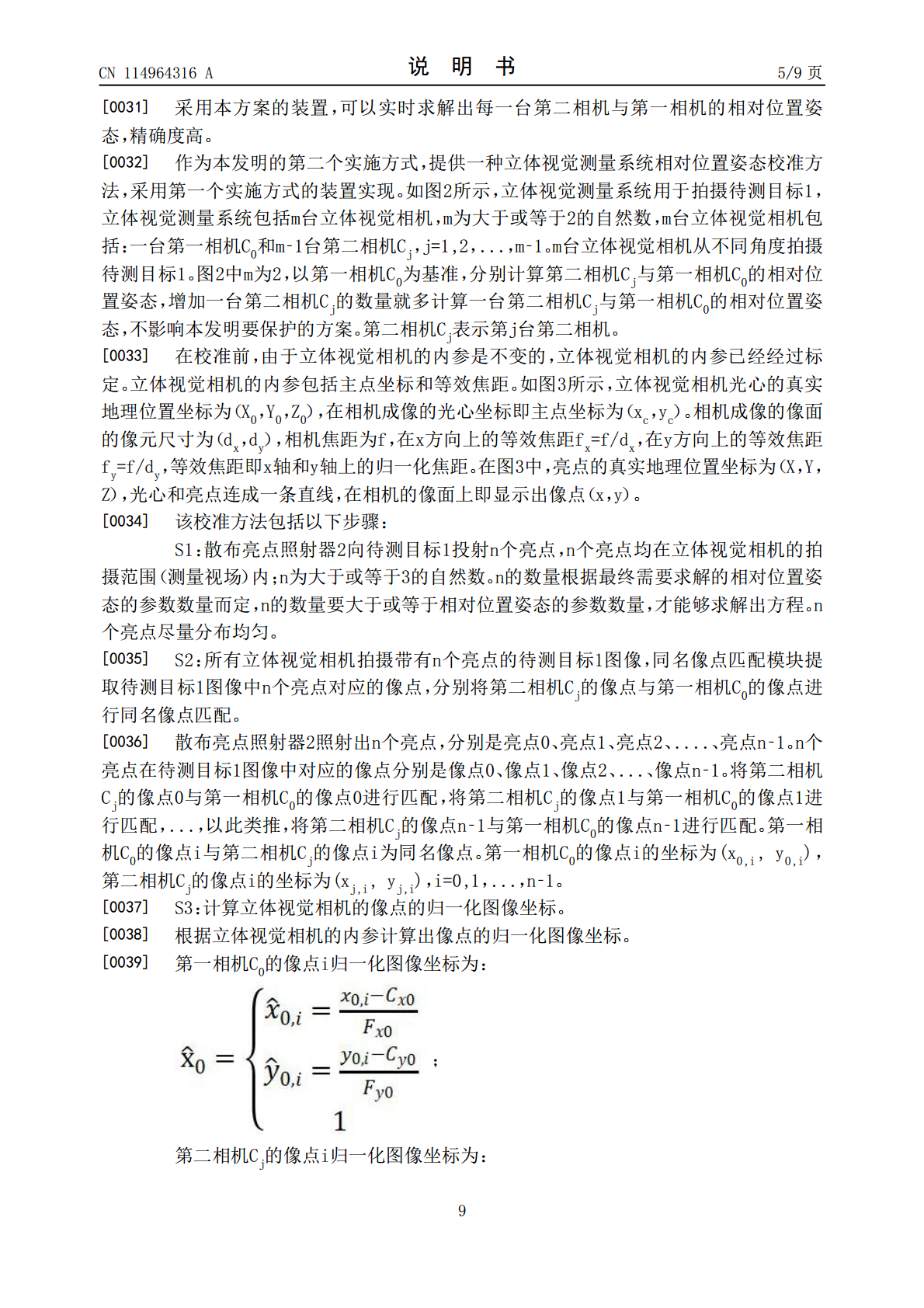
本发明涉及视觉测量以及图像检测技术领域,提供一种位置姿态校准方法及装置、测量待测目标的方法、系统。校准方法包括:立体视觉测量系统包括第一相机和第二相机,向待测目标投射n个亮点,立体视觉相机拍摄带有n个亮点的待测目标图像,提取待测目标图像中n个亮点对应的像点,分别将第二相机的像点与第一相机的像点进行同名像点匹配;计算立体视觉相机的像点的归一化图像坐标;根据同名像点以及第一相机和第二相机的像点的归一化图像坐标分别求解出每一台第二相机与第一相机相对位置姿态。本方案能够在保证测量相对位置姿态精度的同时不局限于各种

单目立体视觉测量系统位置姿态校准方法、装置、系统.pdf
本发明涉及视觉测量以及图像检测技术领域,提供一种单目立体视觉测量系统位置姿态校准方法、装置、系统。校准方法包括:单目立体视觉测量系统包括一台相机,该相机运动至2个以上运动位置拍摄被测目标;2个以上运动位置包括:基准运动位置和相对运动位置;向被测目标投射3个以上亮点;该相机运动至2各个以上运动位置,分别拍摄带有3个以上亮点的被测目标图像,提取被测目标图像中的像点,分别将像点进行同名像点匹配;计算相机在各个运动位置拍摄的像点的归一化图像坐标;根据同名像点以及各个运动位置拍摄的像点的归一化图像坐标分别求解出相机
用于待测设备的通用校准的方法和系统.pdf
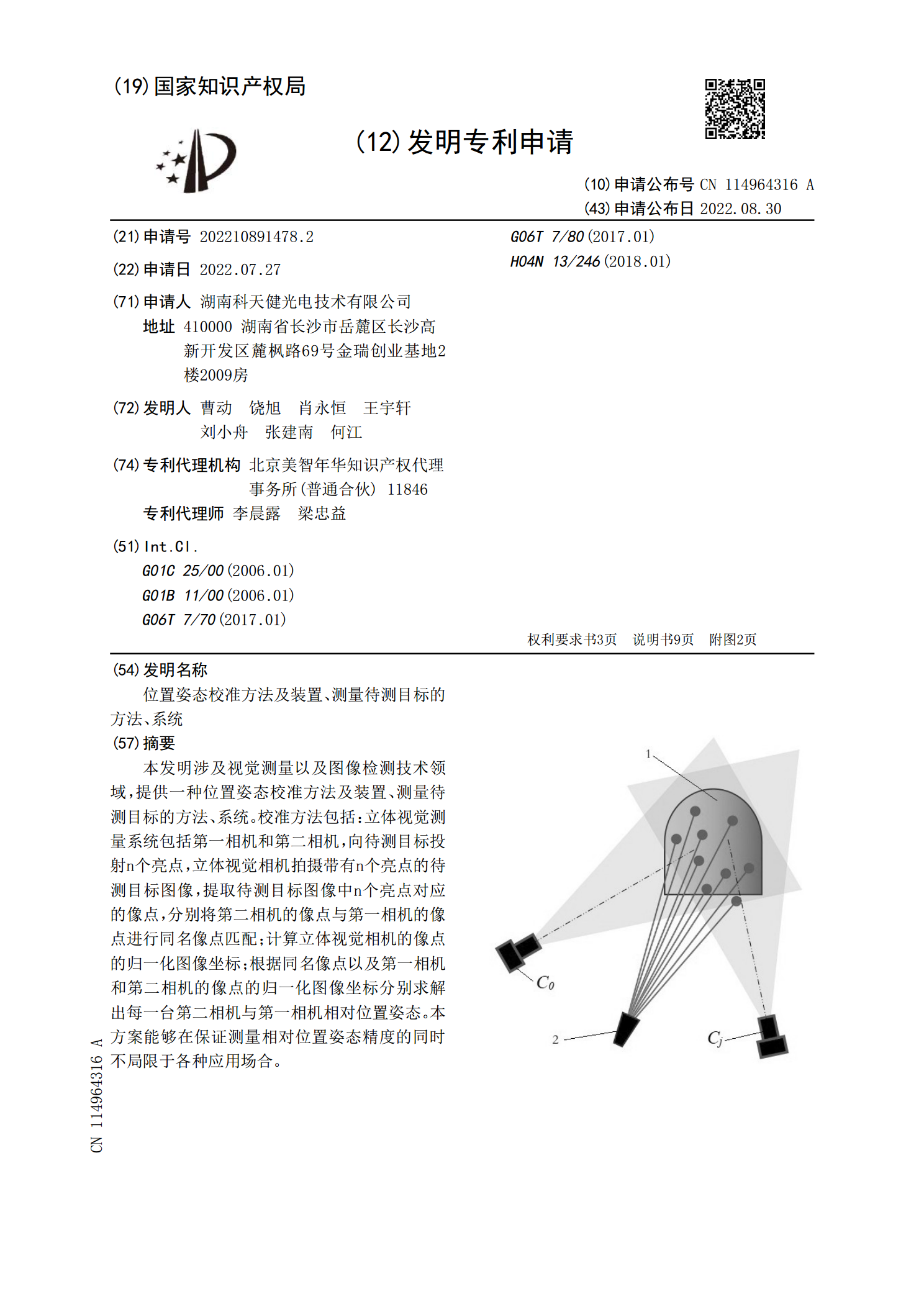
本发明公开了方法和系统,方法和系统包括通用的设备不可知校准过程,其中由待测设备(DUT)输出的测量指示(或从其得出的校正指示或转换指示)可与用于待校准的任何类型的DUT的校准阈值进行比较。因此实现了完整、通用且可延展的校准过程,该校准过程能够相似地适应常规校准场景和复杂校准场景。不考虑该特定的待测设备,可为所有待校准设备生成共同统计值集合,并且可评估该共同统计值集合中的统计值以确定该DUT的校准状态。另外,本文所公开的方法和系统提供生成综合测量记录集合,该综合测量记录集合可例如根据允许对所执行的每一次测量

容纳待测量工具的工具架及测量系统和其校准方法.pdf
本发明涉及一种容纳待测量工具的工具架及测量系统和其校准方法。该工具架用于对测量系统中有待测量工具进行容纳。该工具架例如可以是主轴或者是工具预调装置的装入主轴内的适配件。该测量系统用于测量工具以及该方法用于根据工具零点校准这种测量系统。工具架首先包括旋转对称的可被夹紧的基体(20),其对称轴线(22)限定了工具架的竖直轴线。为工具架分配工具零点(23),它表现为对于有待容纳的工具的基准点。工具架此外包括可从外部辨识的校准标志(24),其距工具零点(23)具有水平距离和竖直距离。依据本发明,校准标志(24)在
位置测量系统、用于位置测量的处理装置和处理方法.pdf
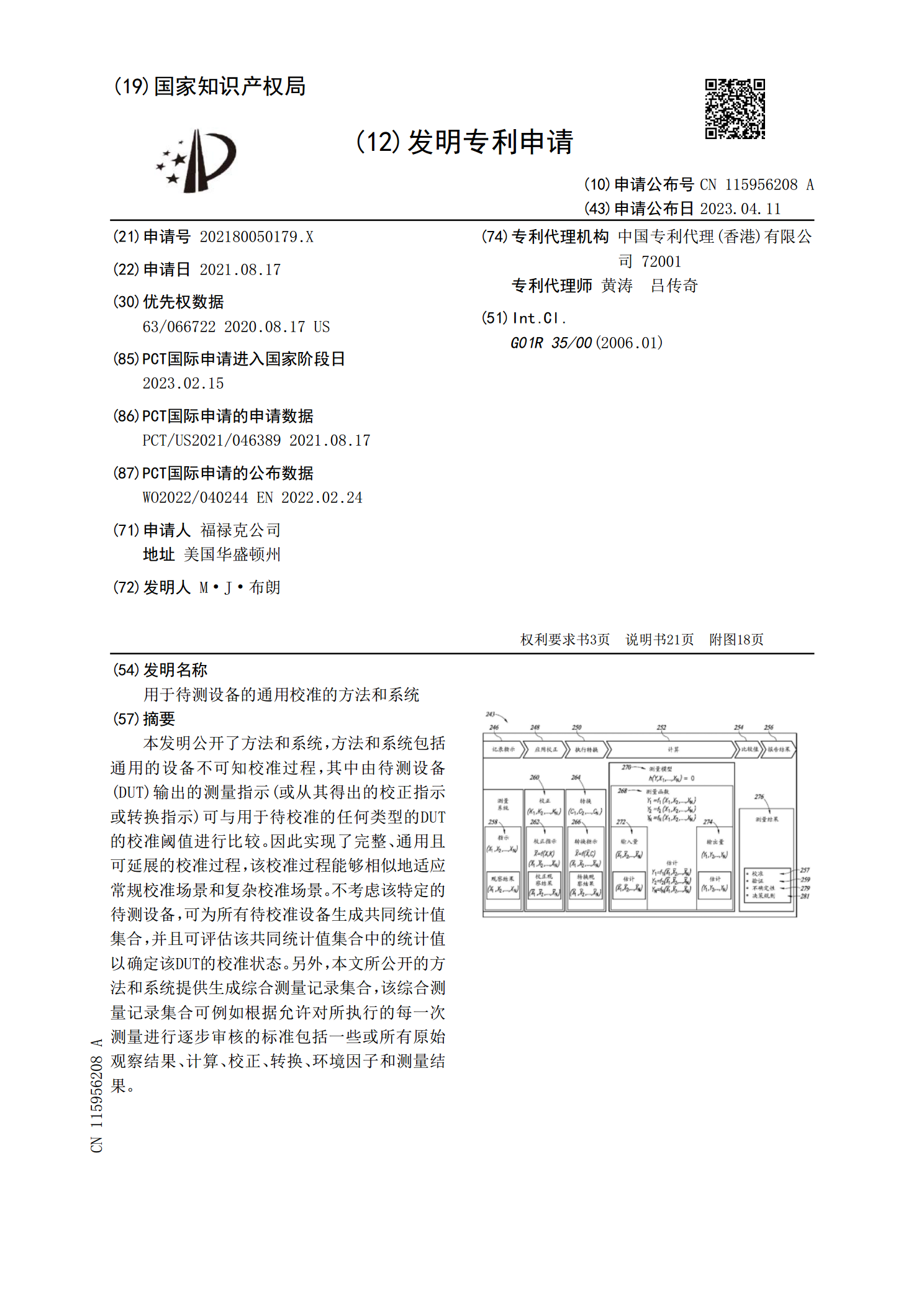
本发明公开了一种位置测量系统、用于位置测量的处理装置和处理方法,所述位置测量系统包括:标识组,其具有位置关系已知并且安装到物体的第二区域上的三个或更多个基本标识,所述物体包含具有作用部分的第一区域和与所述第一区域连续的所述第二区域;摄像装置,其具有拍摄所述标识组的图像的二维摄像元件;记录装置,其记录所述作用部分相对于所述标识组的坐标;以及处理装置,其利用基于所述摄像装置所拍摄的所述标识组的图像而确定的所述标识组的位置和角度以及记录在所述记录装置中的所述作用部分相对于所述标识组的坐标来计算所述作用部分的三维