
单目立体视觉测量系统位置姿态校准方法、装置、系统.pdf

子安****吖吖


1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单目立体视觉测量系统位置姿态校准方法、装置、系统.pdf
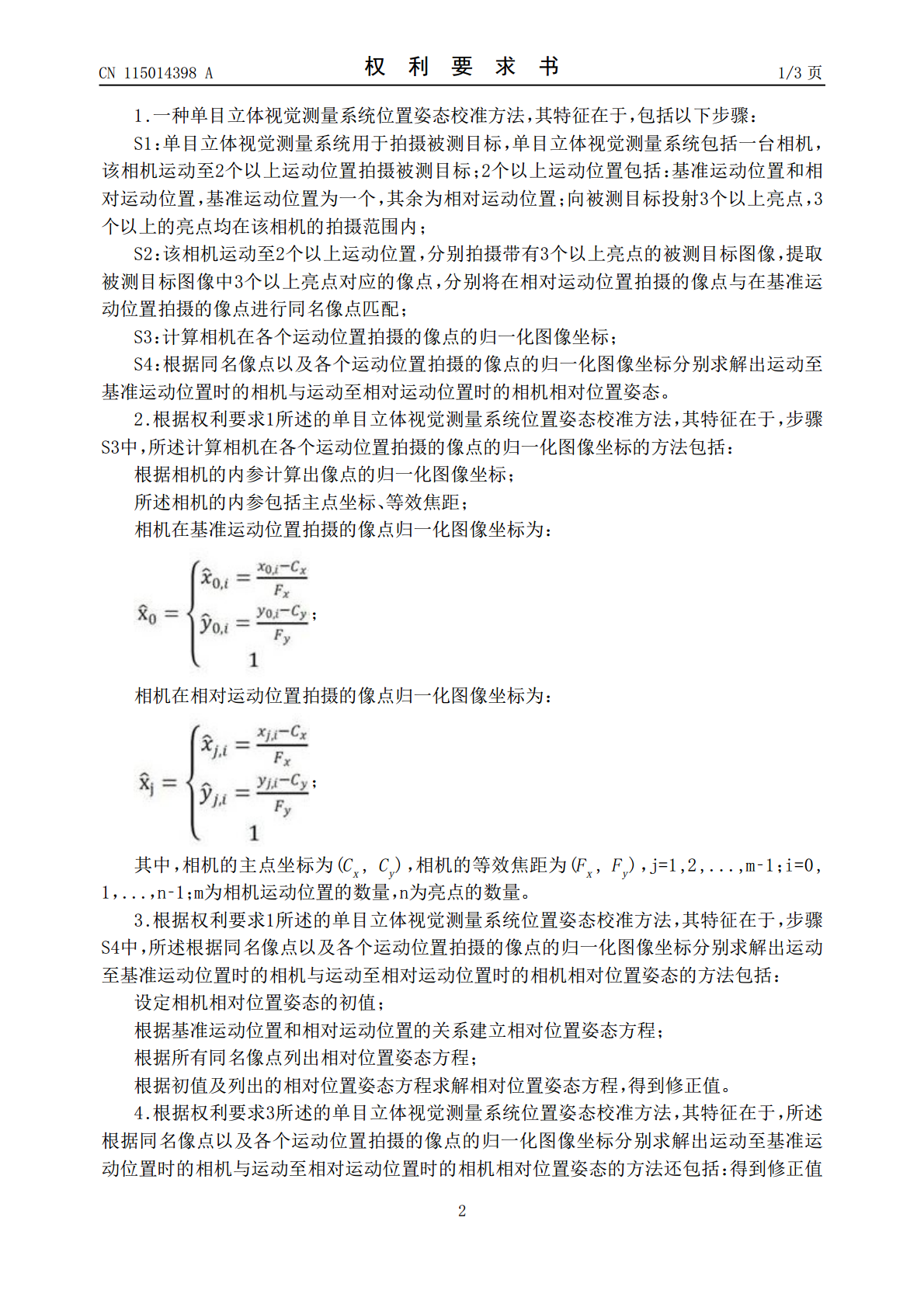
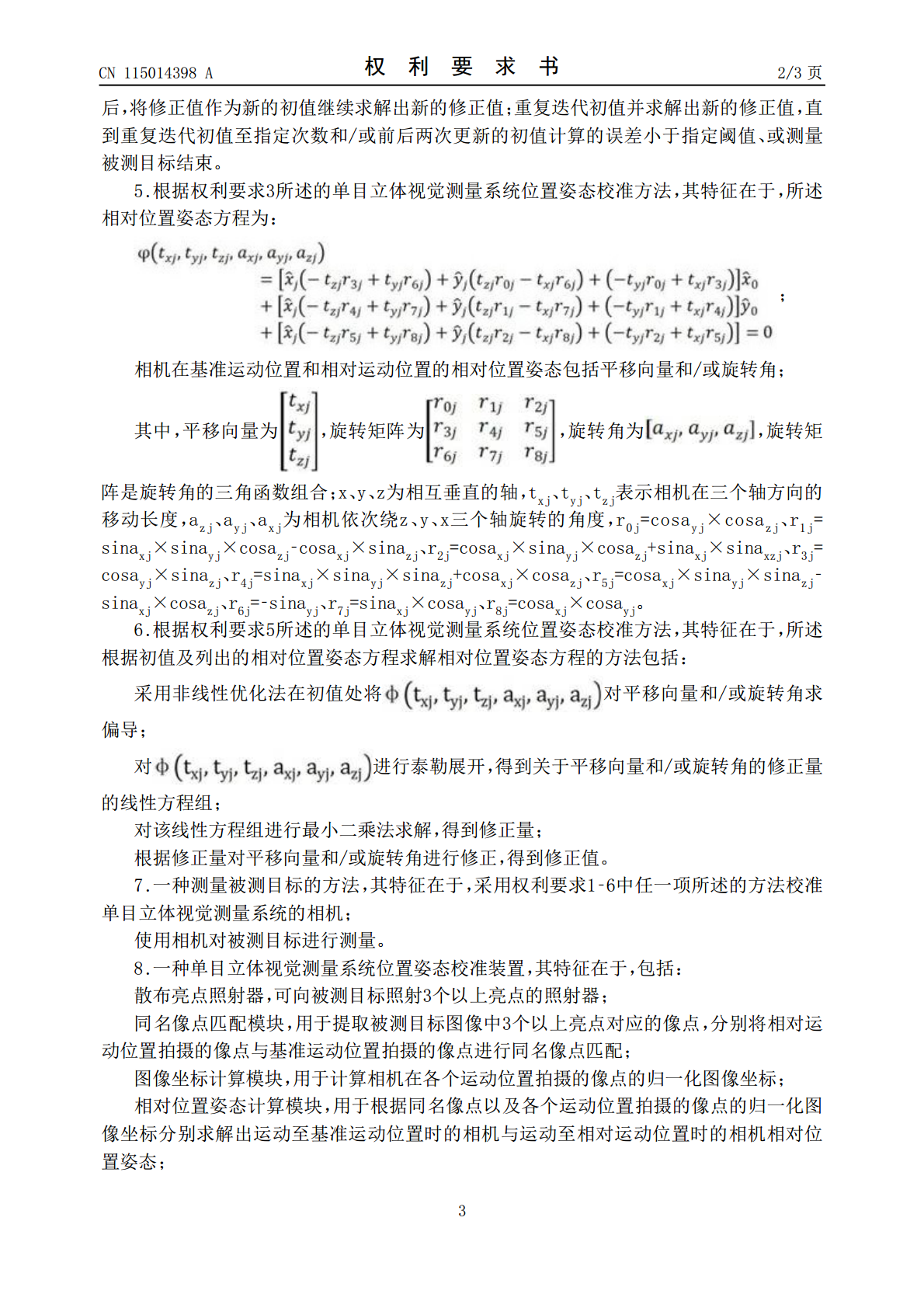
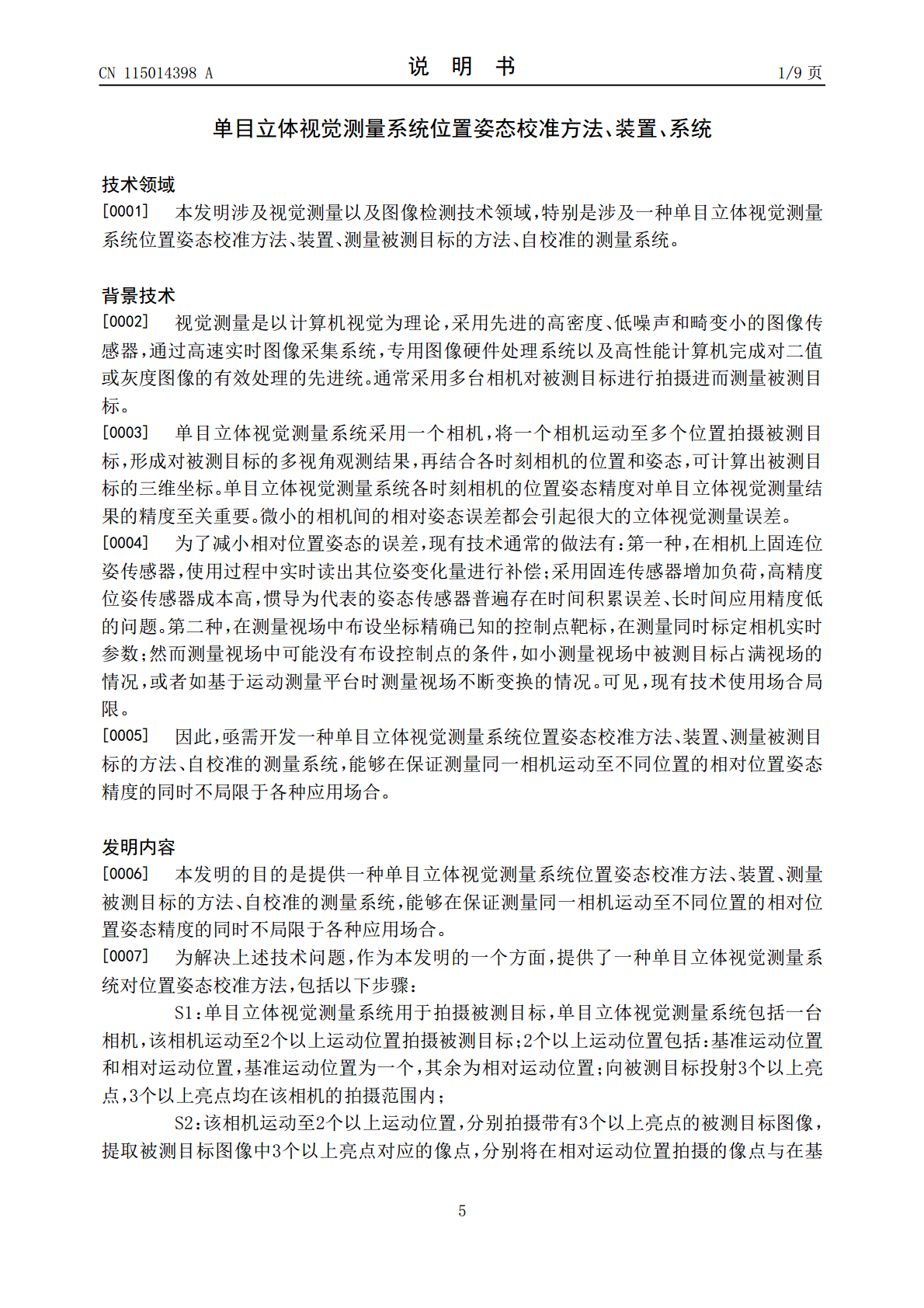
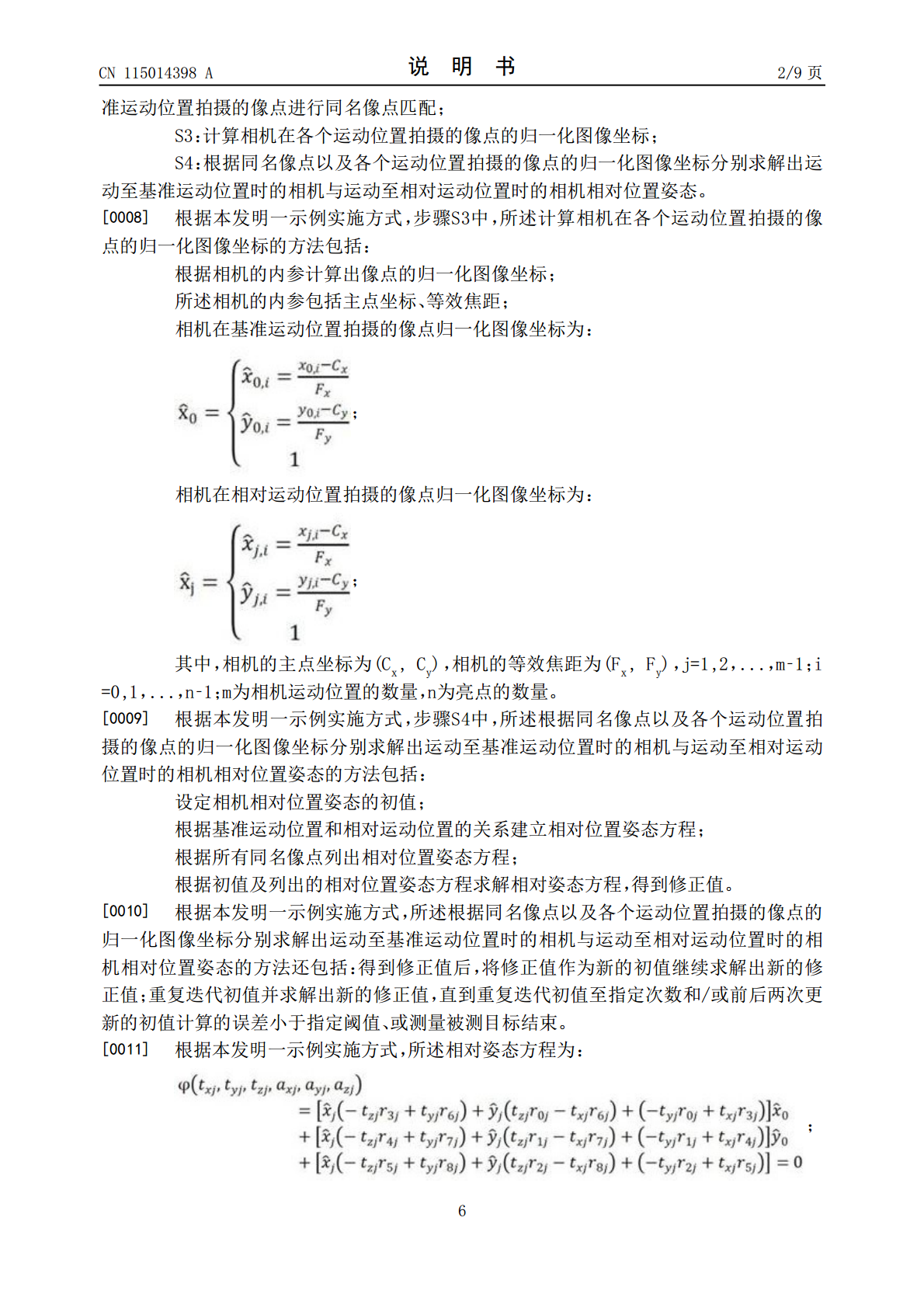
本发明涉及视觉测量以及图像检测技术领域,提供一种单目立体视觉测量系统位置姿态校准方法、装置、系统。校准方法包括:单目立体视觉测量系统包括一台相机,该相机运动至2个以上运动位置拍摄被测目标;2个以上运动位置包括:基准运动位置和相对运动位置;向被测目标投射3个以上亮点;该相机运动至2各个以上运动位置,分别拍摄带有3个以上亮点的被测目标图像,提取被测目标图像中的像点,分别将像点进行同名像点匹配;计算相机在各个运动位置拍摄的像点的归一化图像坐标;根据同名像点以及各个运动位置拍摄的像点的归一化图像坐标分别求解出相机
位置姿态校准方法及装置、测量待测目标的方法、系统.pdf
本发明涉及视觉测量以及图像检测技术领域,提供一种位置姿态校准方法及装置、测量待测目标的方法、系统。校准方法包括:立体视觉测量系统包括第一相机和第二相机,向待测目标投射n个亮点,立体视觉相机拍摄带有n个亮点的待测目标图像,提取待测目标图像中n个亮点对应的像点,分别将第二相机的像点与第一相机的像点进行同名像点匹配;计算立体视觉相机的像点的归一化图像坐标;根据同名像点以及第一相机和第二相机的像点的归一化图像坐标分别求解出每一台第二相机与第一相机相对位置姿态。本方案能够在保证测量相对位置姿态精度的同时不局限于各种

基于单目视觉的位置姿态测量系统精度检校方法.docx
基于单目视觉的位置姿态测量系统精度检校方法基于单目视觉的位置姿态测量系统精度检校方法摘要:单目视觉是一种常用的位置姿态测量技术,广泛应用于机器人、无人机和虚拟现实等领域。然而,单目视觉系统存在着精度不足的问题,为了提高其测量精度,本文提出了一种基于单目视觉的位置姿态测量系统精度检校方法。该方法主要通过对标定板的图像信息进行分析和处理,计算出相机的内外参数,从而获得更加准确的测量结果。实验结果表明,该方法能够有效提高单目视觉系统的测量精度,具有较高的可行性和实用性。关键词:单目视觉;位置姿态测量;精度检校;

全景立体球视觉装置的镜头位置校准方法研究.docx
全景立体球视觉装置的镜头位置校准方法研究全景立体球视觉装置是一种高级的视觉设备,它集成了多个摄像头、光学透镜和图像处理器,可以同时捕捉整个场景的360度全景图像,并将其转换为立体图像,实现三维空间的效果。然而,由于每个摄像头的位置和方向都不同,这些图像可能存在畸变和重叠,并且需要对其进行校准。本文将介绍几种常见的全景立体球视觉装置的镜头位置校准方法,并探讨其优劣之处。一、传统的基于物体特征的校准方法这种方法是最早引入的校准方法。它通过检测相邻图像的特征点,如边缘、直线、角点等,来确定相机的位置和方向。这个

基于单目显微视觉的微球姿态测量方法.docx
基于单目显微视觉的微球姿态测量方法基于单目显微视觉的微球姿态测量方法摘要本文介绍了一种基于单目显微视觉的微球姿态测量方法。该方法通过分析球的图像特征来计算出球的姿态角度,准确度高,可应用于纳米粒子的研究。关键词:单目显微视觉,微球姿态测量,图像处理,粒子分析引言微球是微纳米领域中常用的粒子。研究微球的姿态可以得到关于微观结构和物质性质的信息。因此,发展一种可靠的微球姿态测量方法是非常重要的。目前已有不少研究采用了基于双目或多目相机的姿态测量方法。然而,由于设备复杂,价格昂贵,这些方法并不适用于低成本的研究