
一种基于航迹关联的目标意图判断方法.pdf

鸿朗****ka

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于航迹关联的目标意图判断方法.pdf
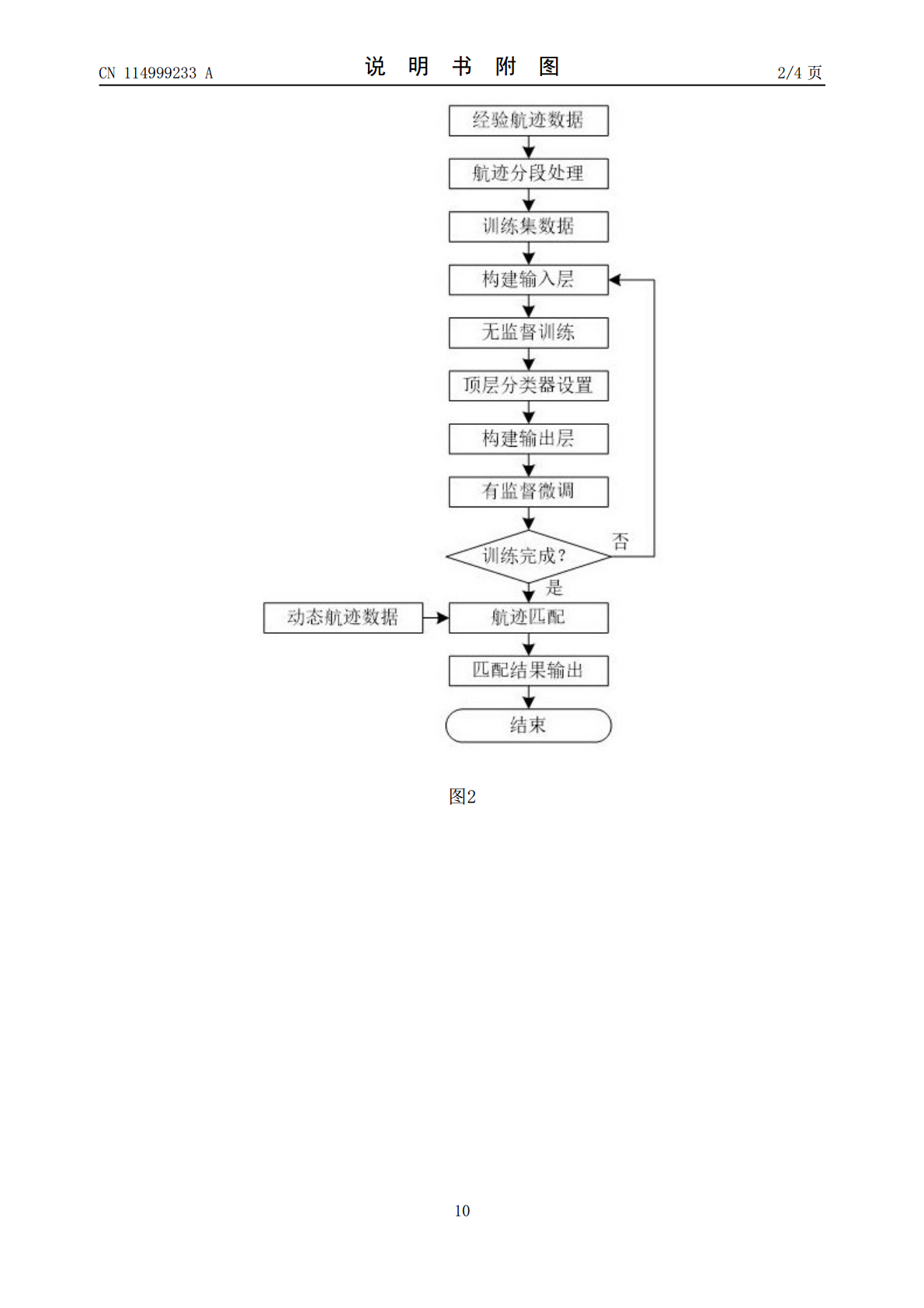
本发明公开了一种基于航迹关联的目标意图判断方法,采用深度置信网络(DBN)模型对目标动态航迹进行匹配,将历史航迹量测数据中的坐标、速度、加速度以及航向作为航迹匹配的特征,构建DBN模型,网络输入层为航迹匹配算法中的各项特征,输出层为匹配结果,得出最佳的航迹匹配网络结构,从而实现对目标动态航迹与经验航迹的匹配,完成目标意图的有效判断。本发明利用DBN模型,当航迹间复杂的相互作用被学习后,能够实现航迹的匹配且匹配正确率较高。
一种基于辅助信息的航迹关联剔除虚假目标的方法.pdf
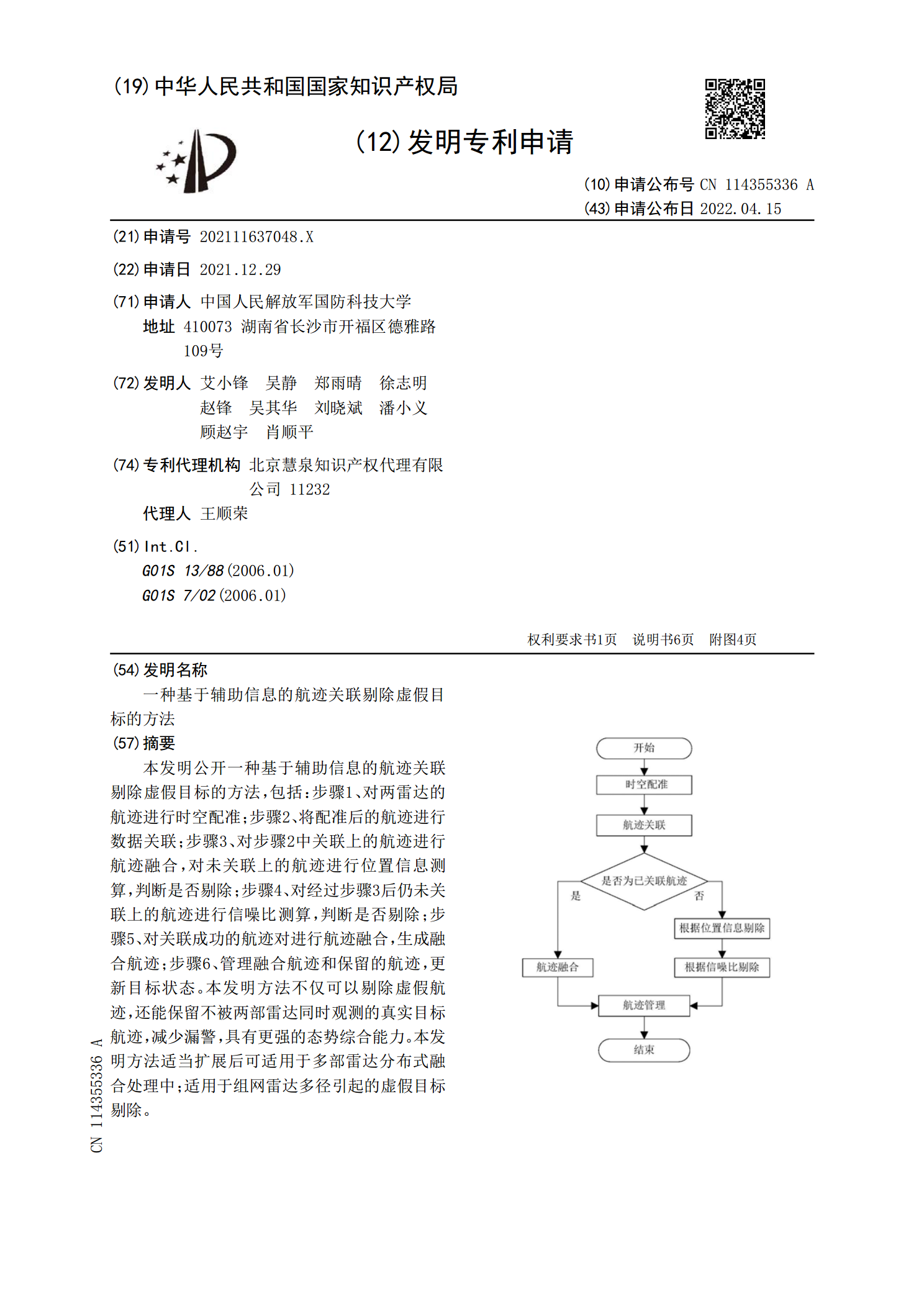
本发明公开一种基于辅助信息的航迹关联剔除虚假目标的方法,包括:步骤1、对两雷达的航迹进行时空配准;步骤2、将配准后的航迹进行数据关联;步骤3、对步骤2中关联上的航迹进行航迹融合,对未关联上的航迹进行位置信息测算,判断是否剔除;步骤4、对经过步骤3后仍未关联上的航迹进行信噪比测算,判断是否剔除;步骤5、对关联成功的航迹对进行航迹融合,生成融合航迹;步骤6、管理融合航迹和保留的航迹,更新目标状态。本发明方法不仅可以剔除虚假航迹,还能保留不被两部雷达同时观测的真实目标航迹,减少漏警,具有更强的态势综合能力。本发
一种基于航迹关联的多假设自动跟踪方法.pdf
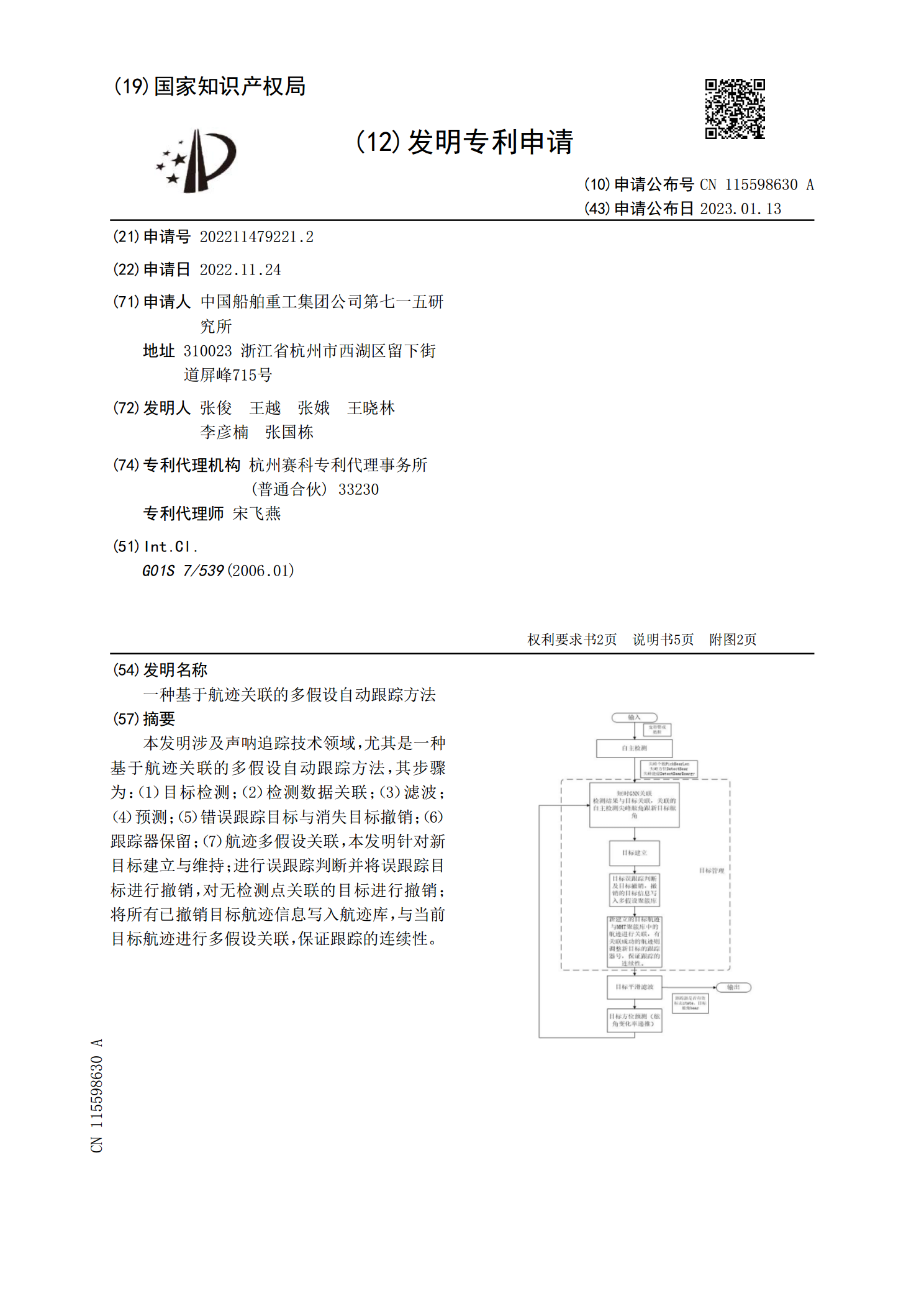
本发明涉及声呐追踪技术领域,尤其是一种基于航迹关联的多假设自动跟踪方法,其步骤为:(1)目标检测;(2)检测数据关联;(3)滤波;(4)预测;(5)错误跟踪目标与消失目标撤销;(6)跟踪器保留;(7)航迹多假设关联,本发明针对新目标建立与维持;进行误跟踪判断并将误跟踪目标进行撤销,对无检测点关联的目标进行撤销;将所有已撤销目标航迹信息写入航迹库,与当前目标航迹进行多假设关联,保证跟踪的连续性。
一种基于纯角度信息的航迹关联方法.pdf
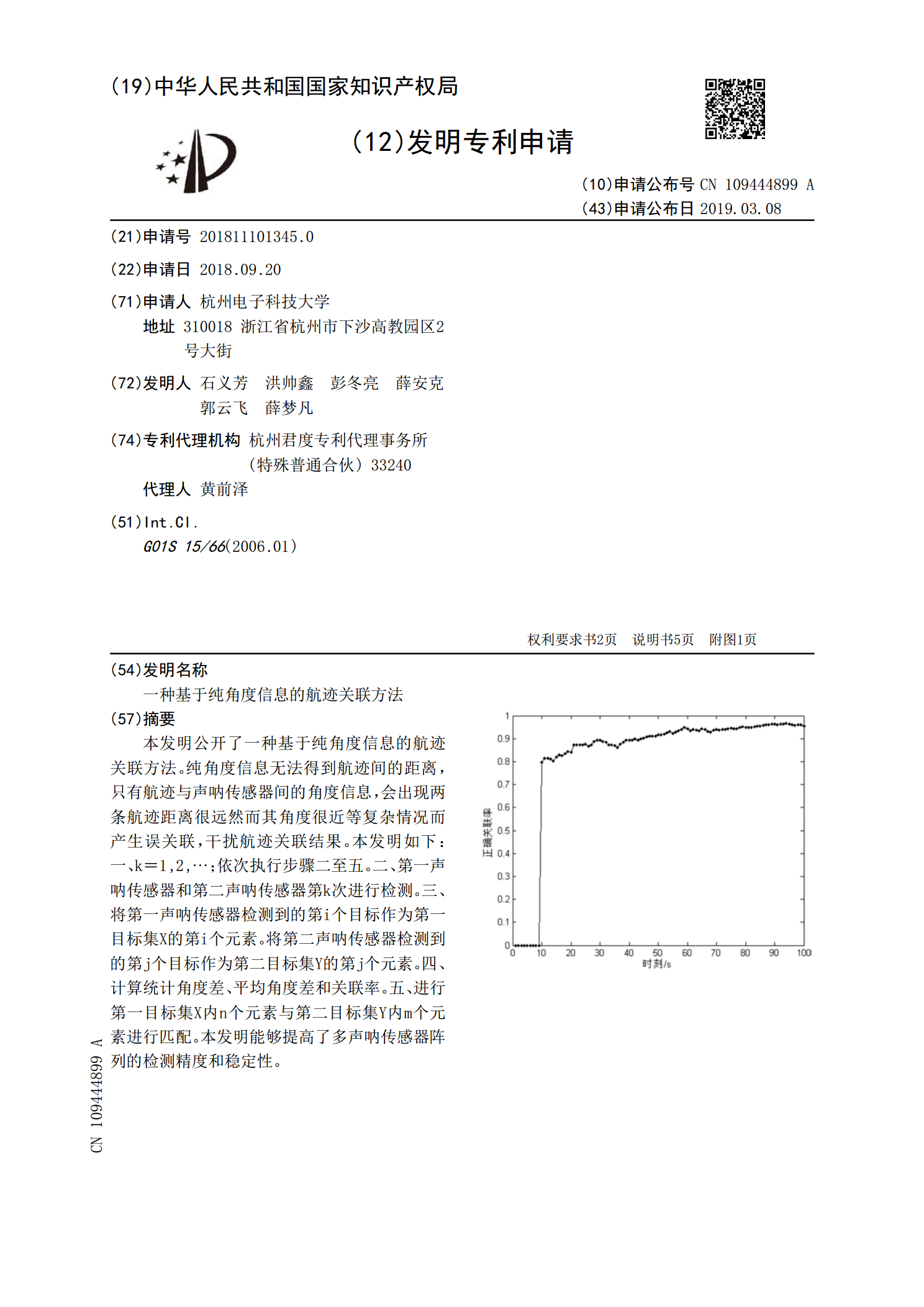
本发明公开了一种基于纯角度信息的航迹关联方法。纯角度信息无法得到航迹间的距离,只有航迹与声呐传感器间的角度信息,会出现两条航迹距离很远然而其角度很近等复杂情况而产生误关联,干扰航迹关联结果。本发明如下:一、k=1,2,…;依次执行步骤二至五。二、第一声呐传感器和第二声呐传感器第k次进行检测。三、将第一声呐传感器检测到的第i个目标作为第一目标集X的第i个元素。将第二声呐传感器检测到的第j个目标作为第二目标集Y的第j个元素。四、计算统计角度差、平均角度差和关联率。五、进行第一目标集X内n个元素与第二目标集Y内

基于数据拟合的航迹关联方法.docx
基于数据拟合的航迹关联方法基于数据拟合的航迹关联方法摘要:航迹关联是航空交通管理(ATM)领域中一个关键的问题,它用于将多个航空器在时间和空间上进行关联,以便进行有效的交通管理。本论文将介绍基于数据拟合的航迹关联方法,重点在于利用数据拟合技术来准确地匹配和关联多个航迹,以提高航空交通的安全性和效率。1.引言航空交通管理涉及到大量航空器在空中的运动,而正确地将这些航迹进行关联对于确保航空安全和提高效率至关重要。传统的航迹关联方法主要基于数学模型或启发式规则,而这些方法在特定条件下可能会出现短板。数据拟合技术