
用于估计系统状态的方法和装置.pdf

秀华****魔王

1/10

2/10
3/10

4/10
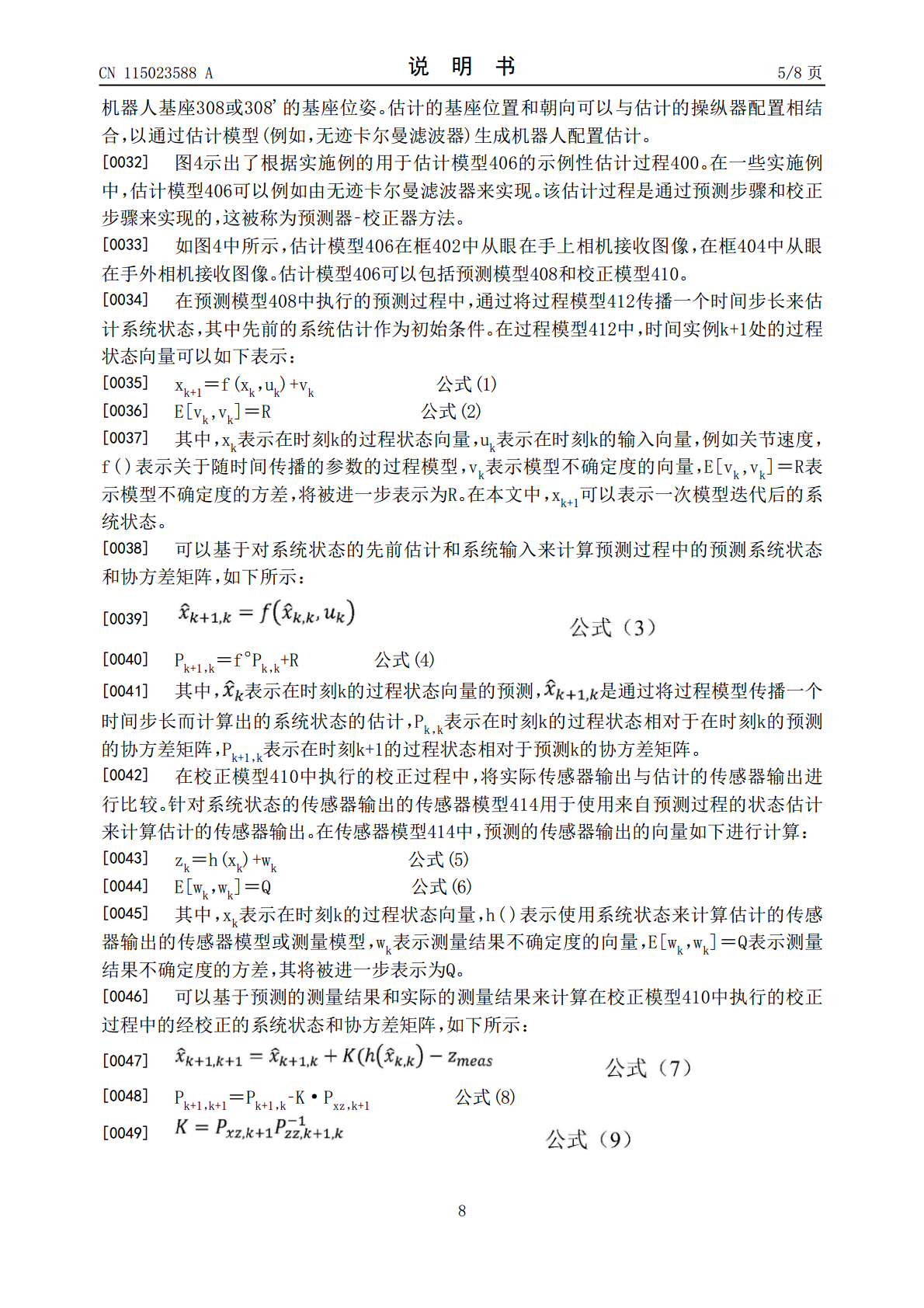
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于估计系统状态的方法和装置.pdf
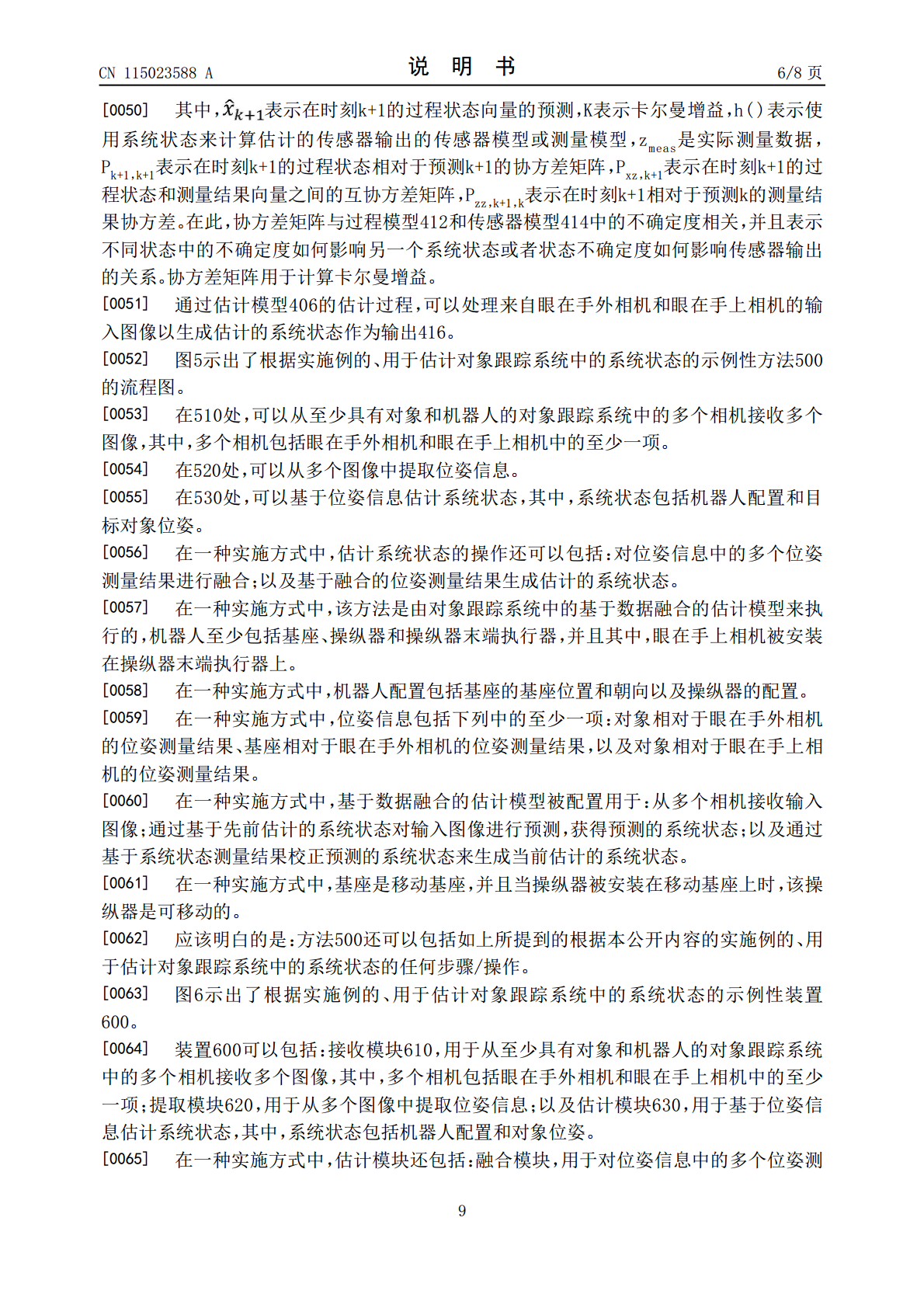
一种用于估计对象跟踪系统(100、200、300)中的系统状态的方法(500)和装置(600)。可以从具有至少一个对象和机器人的对象跟踪系统中的多个相机接收多个图像,其中,所述多个相机包括眼在手外相机和眼在手上相机中的至少一项(510)。可以从所述多个图像中提取位姿信息(520)。可以基于所述位姿信息估计系统状态,其中,所述系统状态包括机器人配置和目标对象位姿(530)。

用于估计车辆轮胎的气压状态的系统和方法.pdf
一种用于估计车辆轮胎的气压状态的系统和方法,其中,所述系统包括一个或更多个传感器单元以及控制器,每个传感器单元包括光学传感器,例如照相机,以获取对应车辆的至少一个车轮的至少一幅图像,所述控制器包括处理器以从所述传感器单元接收所述车辆的各个车轮的图像数据并利用特定的图像分析处理对其进行分析以估计所述车轮轮胎中的一个或更多个轮胎的气压状态。所述处理器还被配置成能够呈现各个对应轮胎的估计气压状态。
路面状态估计方法和路面状态估计装置.pdf
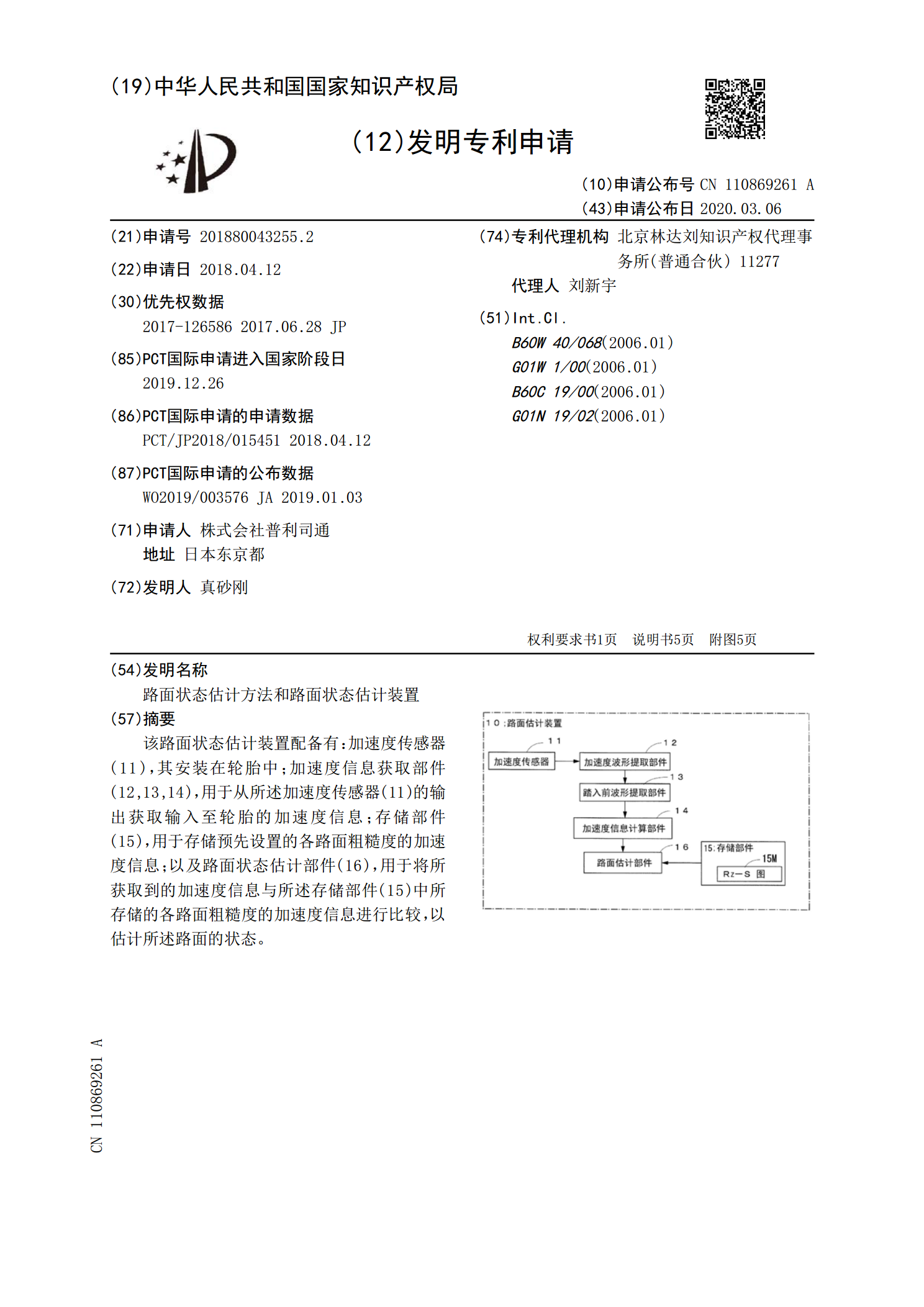
该路面状态估计装置配备有:加速度传感器(11),其安装在轮胎中;加速度信息获取部件(12,13,14),用于从所述加速度传感器(11)的输出获取输入至轮胎的加速度信息;存储部件(15),用于存储预先设置的各路面粗糙度的加速度信息;以及路面状态估计部件(16),用于将所获取到的加速度信息与所述存储部件(15)中所存储的各路面粗糙度的加速度信息进行比较,以估计所述路面的状态。
路面状态估计方法和路面状态估计装置.pdf
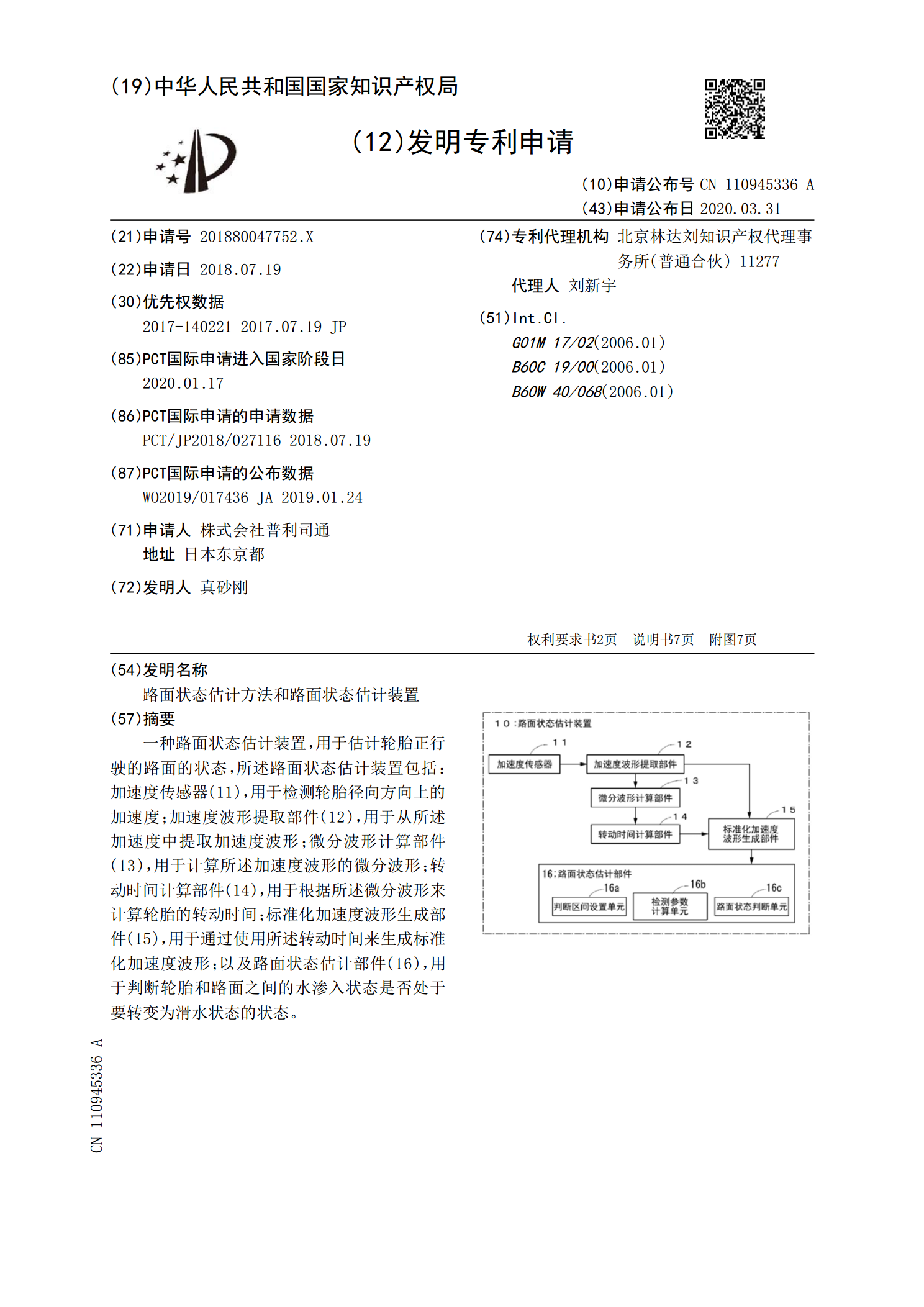
一种路面状态估计装置,用于估计轮胎正行驶的路面的状态,所述路面状态估计装置包括:加速度传感器(11),用于检测轮胎径向方向上的加速度;加速度波形提取部件(12),用于从所述加速度中提取加速度波形;微分波形计算部件(13),用于计算所述加速度波形的微分波形;转动时间计算部件(14),用于根据所述微分波形来计算轮胎的转动时间;标准化加速度波形生成部件(15),用于通过使用所述转动时间来生成标准化加速度波形;以及路面状态估计部件(16),用于判断轮胎和路面之间的水渗入状态是否处于要转变为滑水状态的状态。
用于改善位置估计的装置、系统和方法.pdf
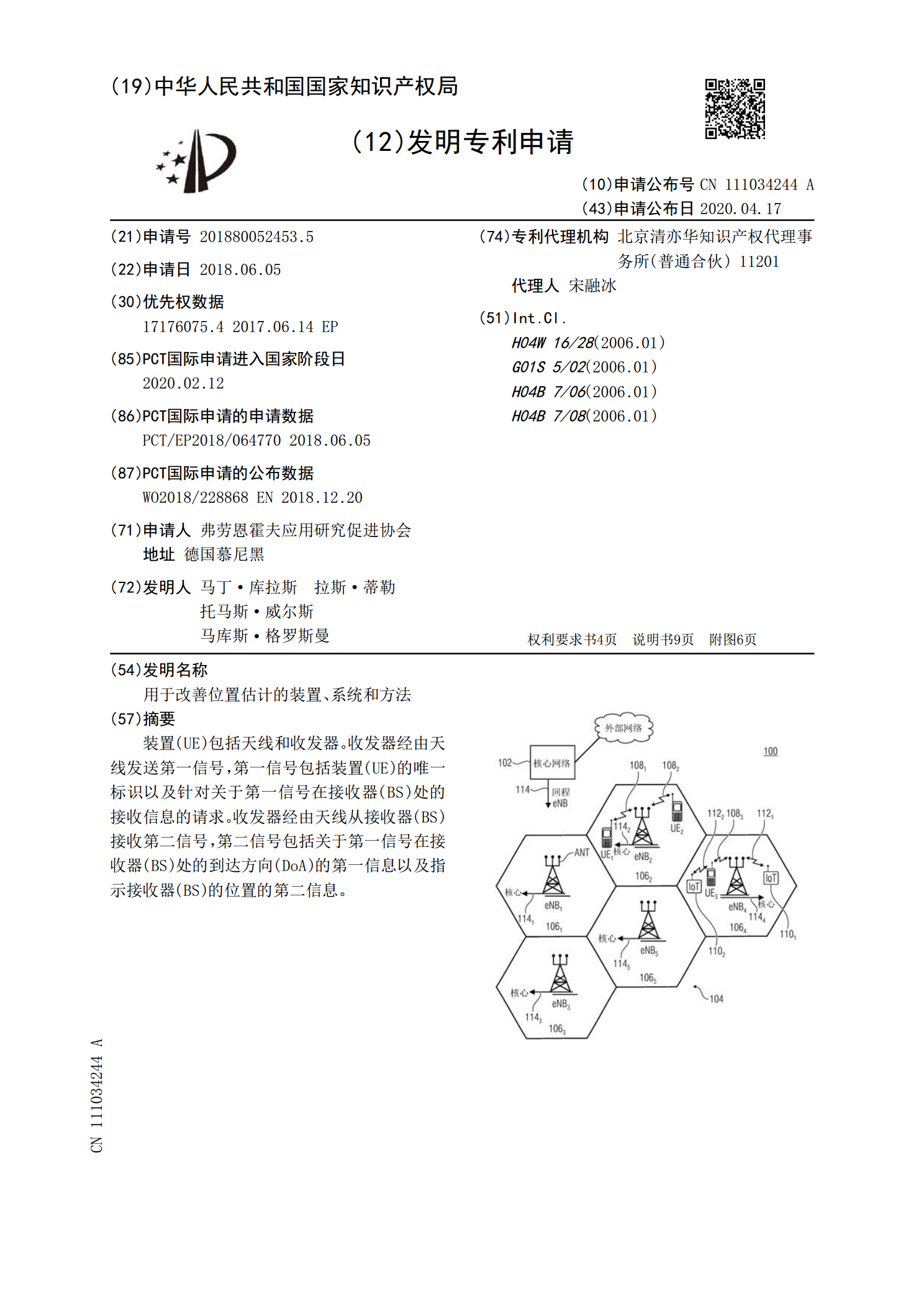
装置(UE)包括天线和收发器。收发器经由天线发送第一信号,第一信号包括装置(UE)的唯一标识以及针对关于第一信号在接收器(BS)处的接收信息的请求。收发器经由天线从接收器(BS)接收第二信号,第二信号包括关于第一信号在接收器(BS)处的到达方向(DoA)的第一信息以及指示接收器(BS)的位置的第二信息。