
用于改善位置估计的装置、系统和方法.pdf

婀娜****aj

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于改善位置估计的装置、系统和方法.pdf
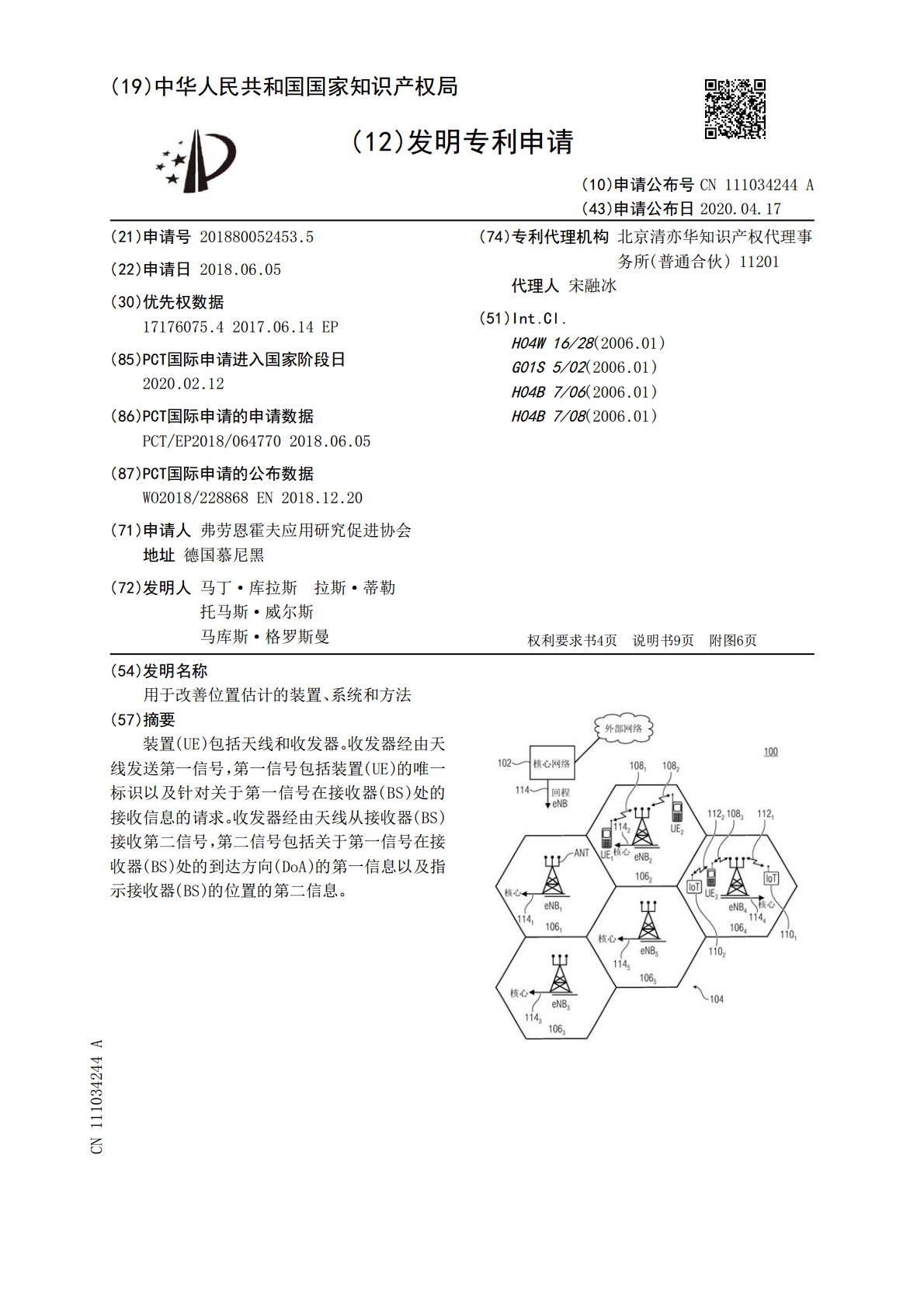
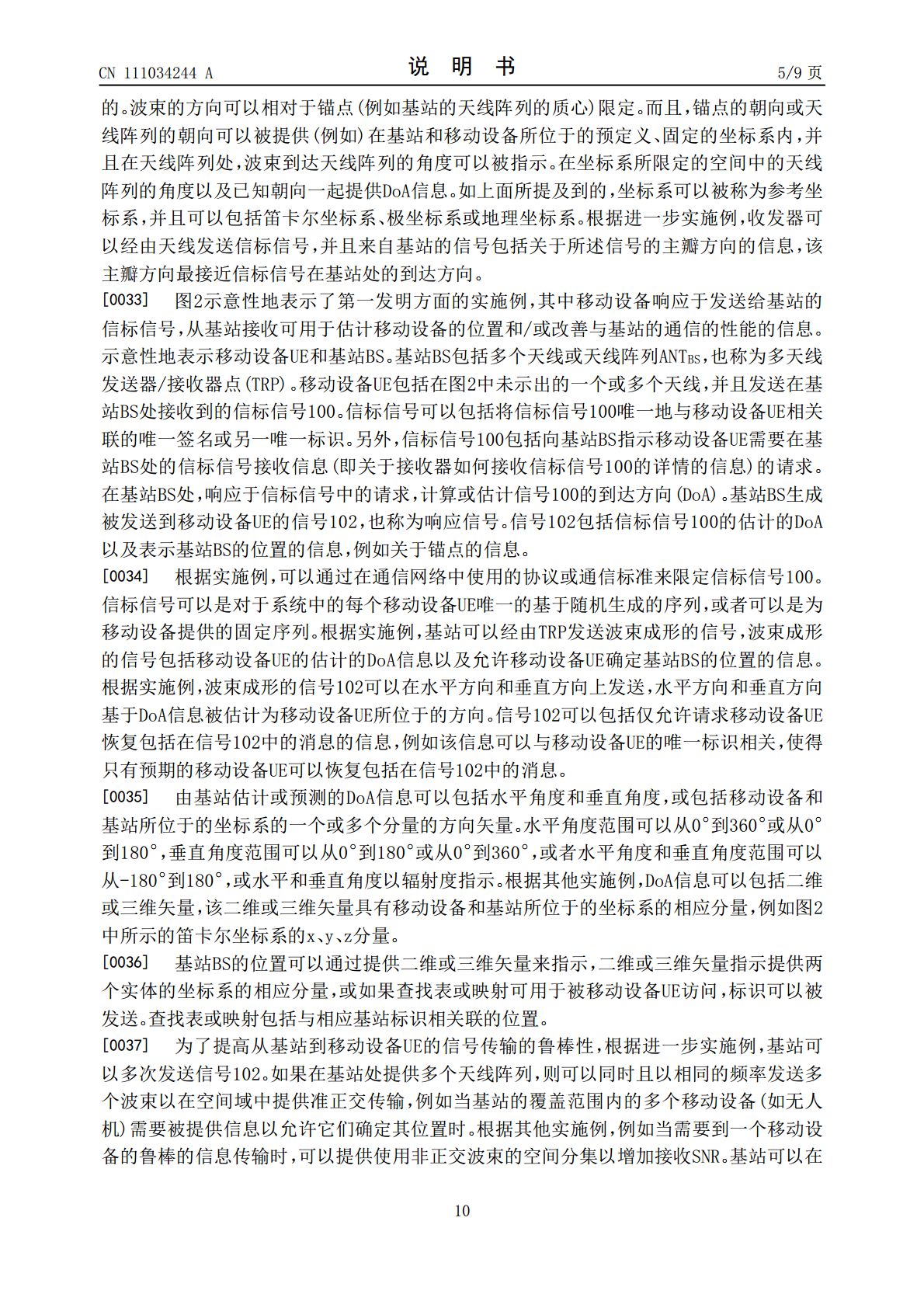
装置(UE)包括天线和收发器。收发器经由天线发送第一信号,第一信号包括装置(UE)的唯一标识以及针对关于第一信号在接收器(BS)处的接收信息的请求。收发器经由天线从接收器(BS)接收第二信号,第二信号包括关于第一信号在接收器(BS)处的到达方向(DoA)的第一信息以及指示接收器(BS)的位置的第二信息。
用于估计蜂窝塔位置的方法和装置.pdf
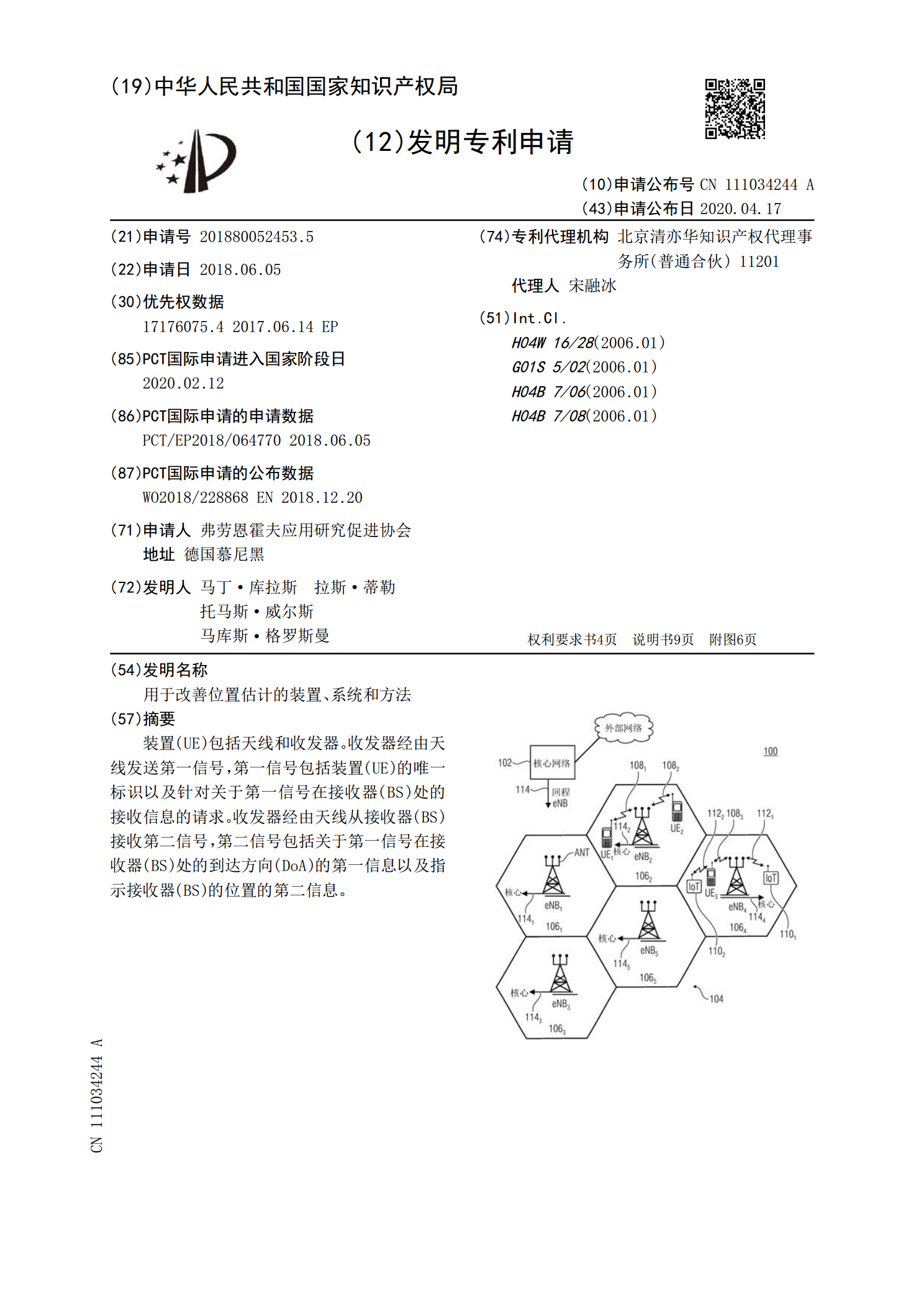
一种用于采集和分析各个地理位置处的蜂窝标识(ID)号以便估计蜂窝塔位置的方法和装置。该方法可以包括采集由采集移动设备在多个地理位置获得的蜂窝ID号,然后计算包括具有相同蜂窝标识号的地理位置点的集合的最小边界圆。如果位置点集合的蜂窝ID号指示蜂窝塔是全向,则最小边界圆的中心是估计的蜂窝塔位置。如果蜂窝ID号指示蜂窝塔是多扇区的,则该装置可以把估计的蜂窝塔位置计算为从多个相关的最小边界圆的中心延伸的线彼此相交以便形成等角的位置。
用于估计心脏泵的位置的系统和方法.pdf
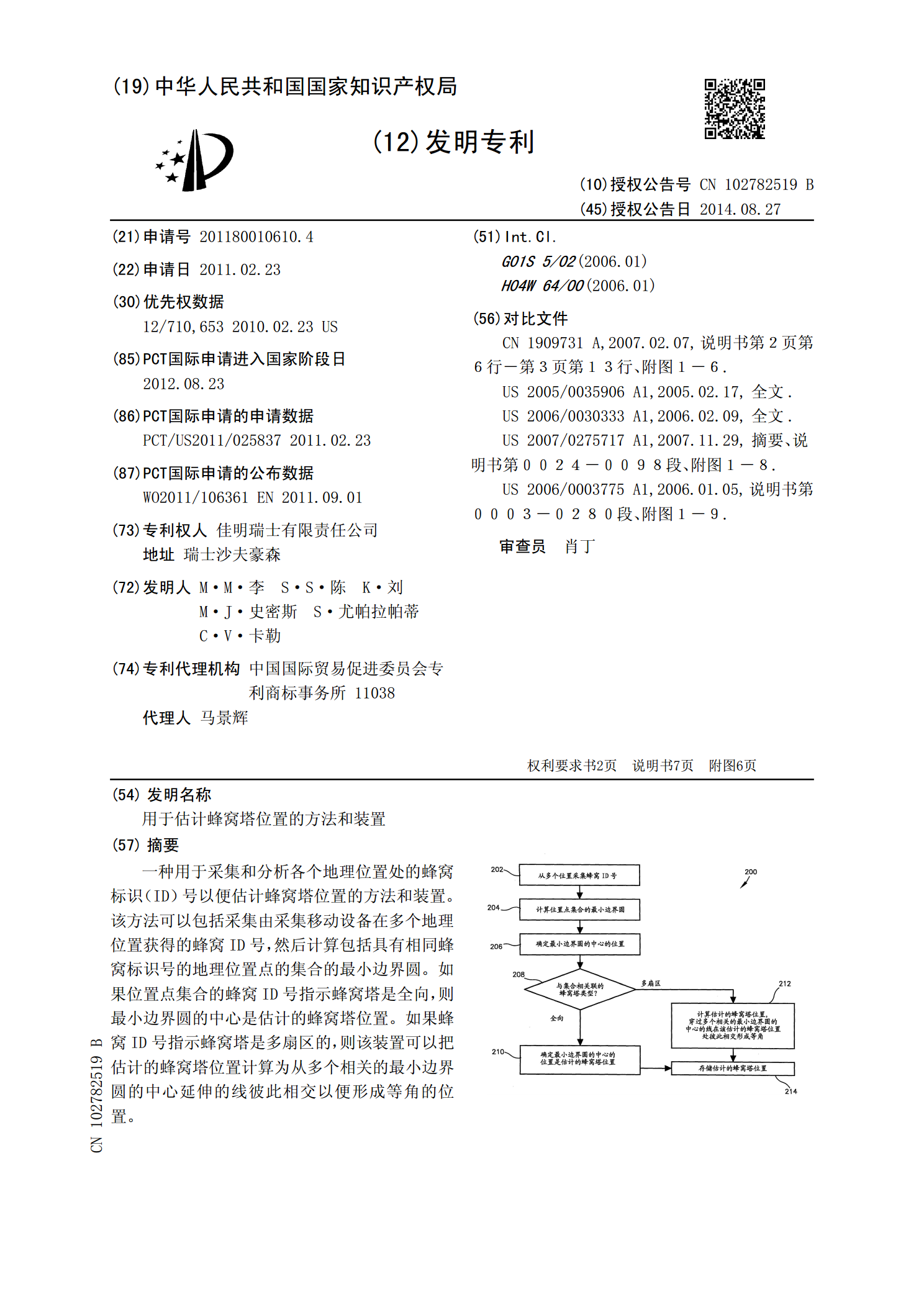
本文提供了用于估计心脏泵系统在患者中的位置的系统和方法。所述系统首先接收指示第一时间段期间的时变电机电流的第一数据。电机电流对应于当心脏泵系统在患者中运行时递送到电机的电流量。所述系统接收指示第一时间段期间的时变压差的第二数据。压差指示心脏泵系统相对于患者心脏的位置。所述系统接收指示第二时间段期间的时变电机电流的第三数据,并从第三数据及第一数据与第二数据之间的关系来确定第二时间段期间的时变压差的估计值。该估计值可用于预测心脏泵系统在患者中的位置。
用于估计系统状态的方法和装置.pdf
一种用于估计对象跟踪系统(100、200、300)中的系统状态的方法(500)和装置(600)。可以从具有至少一个对象和机器人的对象跟踪系统中的多个相机接收多个图像,其中,所述多个相机包括眼在手外相机和眼在手上相机中的至少一项(510)。可以从所述多个图像中提取位姿信息(520)。可以基于所述位姿信息估计系统状态,其中,所述系统状态包括机器人配置和目标对象位姿(530)。

注视位置估计系统、注视位置估计系统的控制方法、注视位置估计装置、注视位置估计装置的控制方法、程序以及信息存储介质.pdf
本发明提供注视位置估计系统,其不用检测虹膜中心位置或者估计眼球中心的投影位置就能够估计用户的注视位置。摄影部(17)拍摄观看显示单元所显示的画面的用户的面部。区域检测部(32)从摄影部(17)的摄影图像检测用户的面部区域与用户的眼睛以外的规定部位区域的至少一方和用户的眼睛区域。面积/位置信息取得部(60)取得眼睛区域的面积信息和位置信息、面部区域与规定部位区域中的至少一方的面积信息和位置信息。注视位置估计部(62)根据由面积/位置信息取得部(60)取得的面积信息和位置信息,估计用户正在注视的画面内的位置。