
机器人的轮毂电机系统及其控制方法.pdf

一吃****成益


1/10
2/10

3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人的轮毂电机系统及其控制方法.pdf
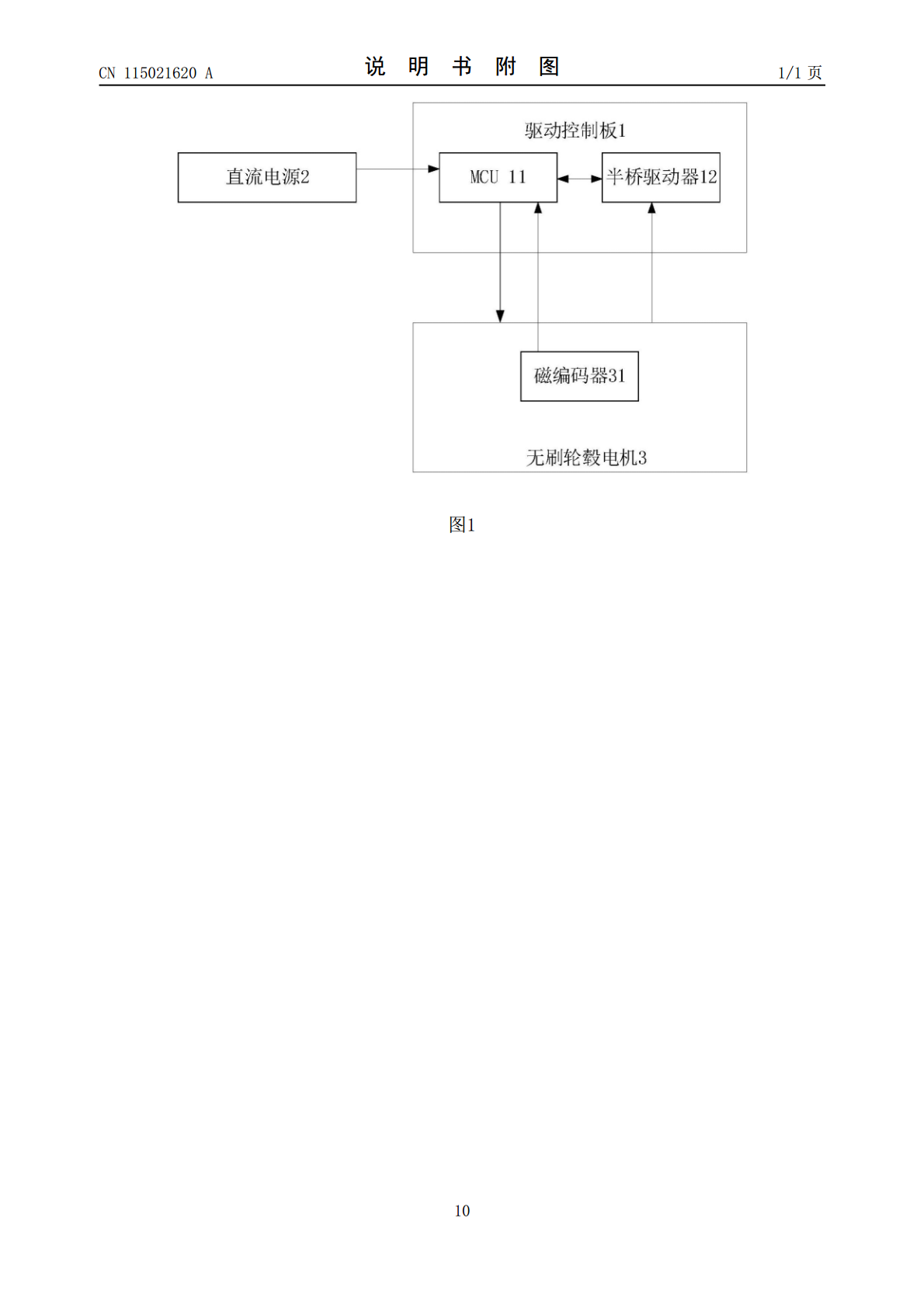
本发明的目的是提供一种机器人的轮毂电机系统及其控制方法,本发明通过半桥驱动器和磁编码器以增量编码的方式控制轮毂电机的方式,本发明包括驱动控制板、磁编码器以及无刷轮毂电机。本发明通过增加磁编码器,本发明通过增加磁编码器,磁编码器基于轮毂电机的转子转过的角度产生磁通量,磁通量会转化成电信号反馈给驱动控制板,驱动控制板可以根据电信号,准确、可靠的确定机器人当前所在的位置。

轮毂电机及其控制方法.pdf
一种轮毂电机及其控制方法,该轮毂电机包括电机轴(1)和定子(2),定子(2)外套设转子外壳(3),其前、后两端分别通过转子端盖(4)和轴承(5)可旋转固定在电机轴(1)上,转子端盖(4)的外侧与毂刹组件(9)相连,转子外壳(3)与轮毂(6)相连,轮毂电机的对应位置设有位置检测装置,所述的位置检测装置包括:固定在电机轴(1)上的保持架(7)和固定在转子端盖(4)上的磁钢环(11),保持架(7)上设有多个霍尔元件(10);电机轴(1)上设有伺服控制器(18);转子端盖(4)与电机轴(1)发生相对转动。本发明结
车辆及其轮毂电机散热系统、轮毂电机散热方法.pdf
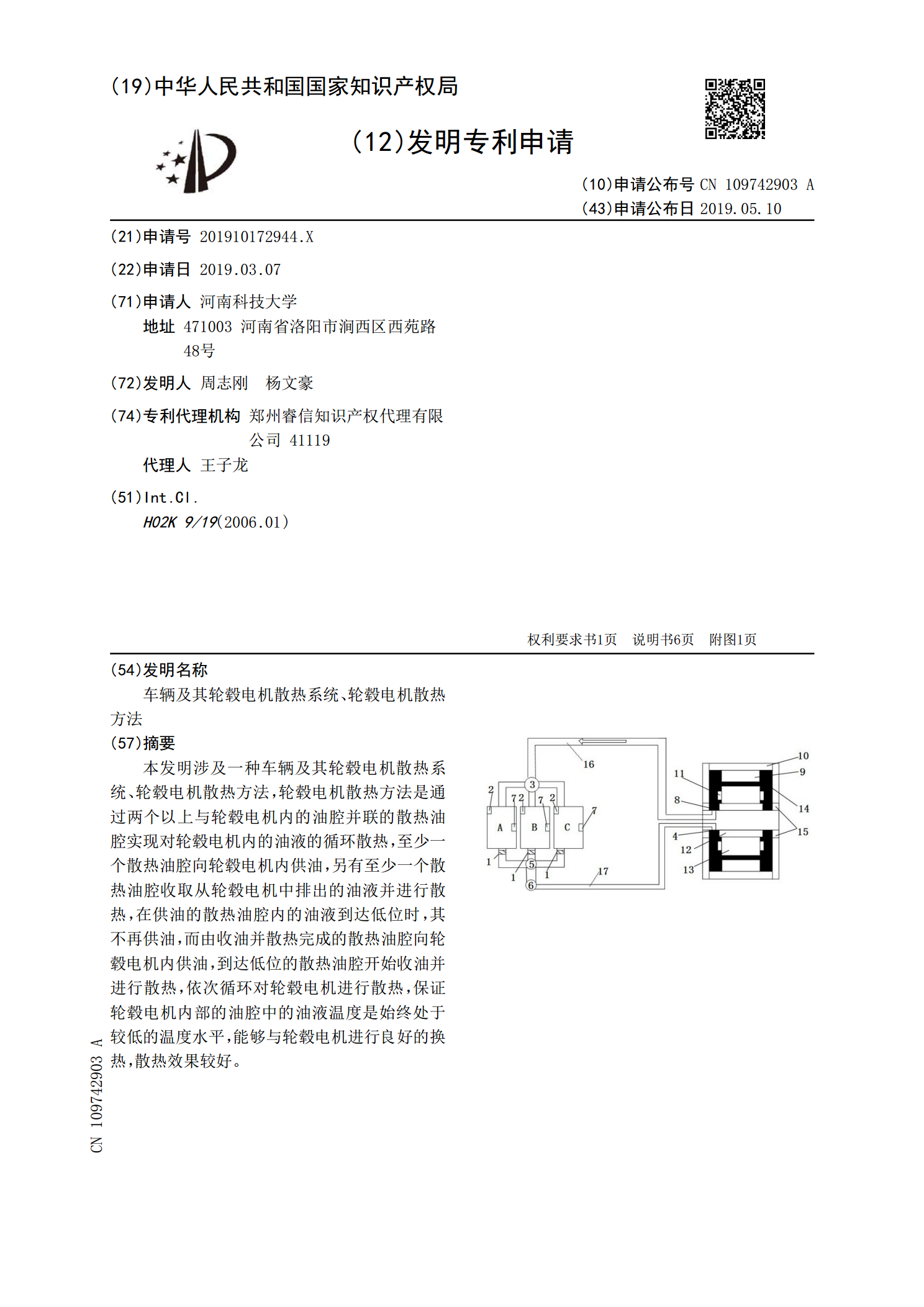
本发明涉及一种车辆及其轮毂电机散热系统、轮毂电机散热方法,轮毂电机散热方法是通过两个以上与轮毂电机内的油腔并联的散热油腔实现对轮毂电机内的油液的循环散热,至少一个散热油腔向轮毂电机内供油,另有至少一个散热油腔收取从轮毂电机中排出的油液并进行散热,在供油的散热油腔内的油液到达低位时,其不再供油,而由收油并散热完成的散热油腔向轮毂电机内供油,到达低位的散热油腔开始收油并进行散热,依次循环对轮毂电机进行散热,保证轮毂电机内部的油腔中的油液温度是始终处于较低的温度水平,能够与轮毂电机进行良好的换热,散热效果较好。

轮毂电机车辆的散热系统及其控制方法.pdf
本发明涉及一种轮毂电机车辆的散热系统,包括车架、多个轮毂电机、循环泵和冷却液箱,冷却液箱、循环泵均固定在车架上,每个轮毂电机内均设有温度传感器,循环泵的进口与所有轮毂电机的冷却管出口之间通过管路连通,循环泵的出口与冷却液箱的进口之间通过管路连通,冷却液箱的出口与所有轮毂电机的冷却管进口之间通过管路连通,与每个轮毂电机的冷却管进口连通的管路上均设有电控单向调节阀。本发明还公开了上述轮毂电机车辆的散热系统的控制方法。本发明的优点是:不但能够对车辆的所有轮毂电机进行有效的散热降温,而且能使得车辆的所有轮毂电机的

多功能轮毂电机控制系统及其工作方法.pdf
本发明涉及轮毂电机领域,具体为一种多功能轮毂电机控制系统及其工作方法,其中多功能轮毂电机控制系统,包括:控制模块,与控制模块电性连接的轮毂电机本体、散热装置和/或减速模块和/或制动装置;所述控制模块适于通过减速模块控制轮毂电机本体减速和/或所述控制模块适于通过散热装置降低轮毂电机本体的温度和/或所述控制模块适于通过制动装置对轮毂电机本体进行制动,实现了在复杂工况下提升轮毂电机本体的性能。