
一种针对复杂曲面的机器人自动磨抛加工装备与加工方法.pdf

文宣****66

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种针对复杂曲面的机器人自动磨抛加工装备与加工方法.pdf
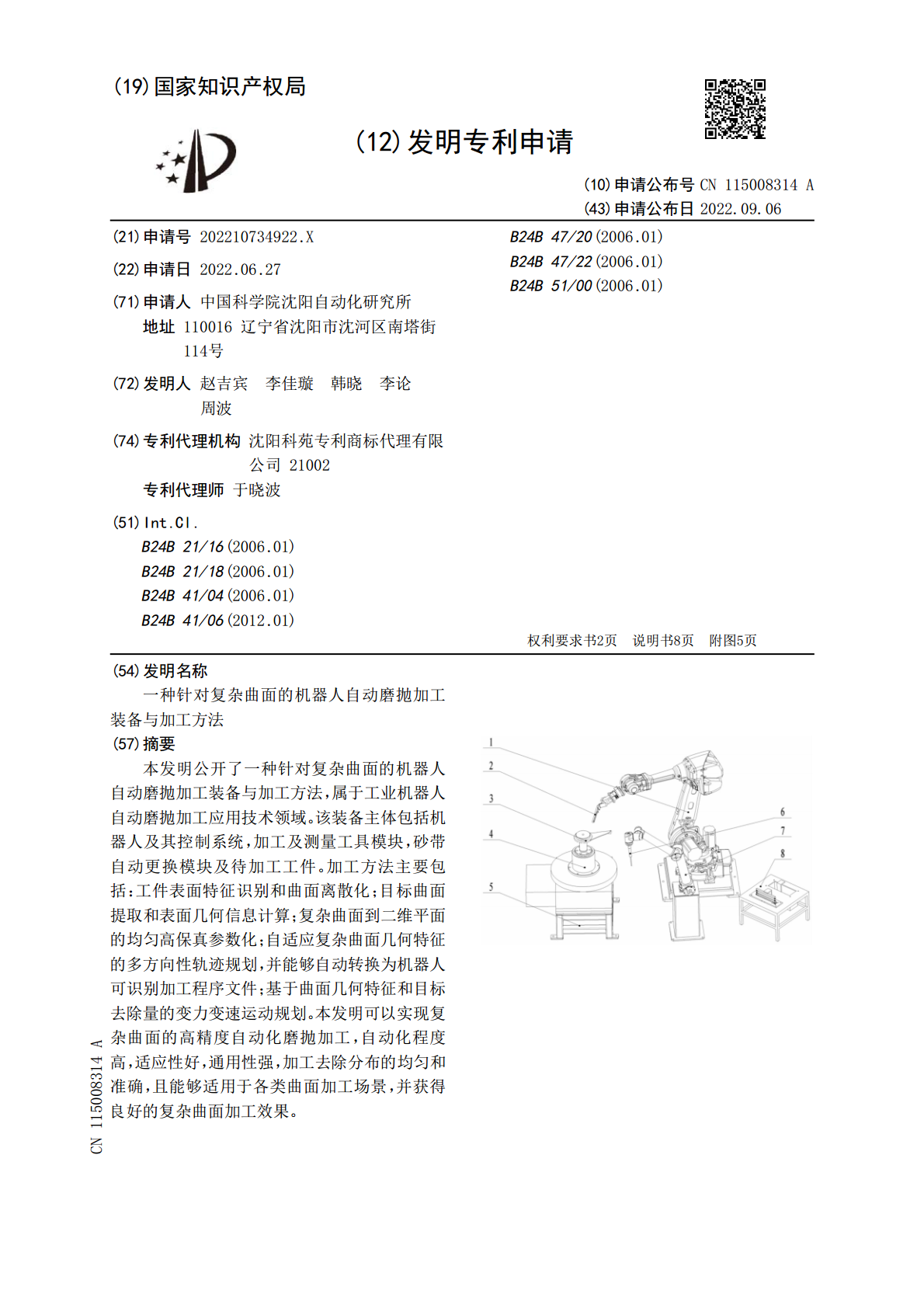
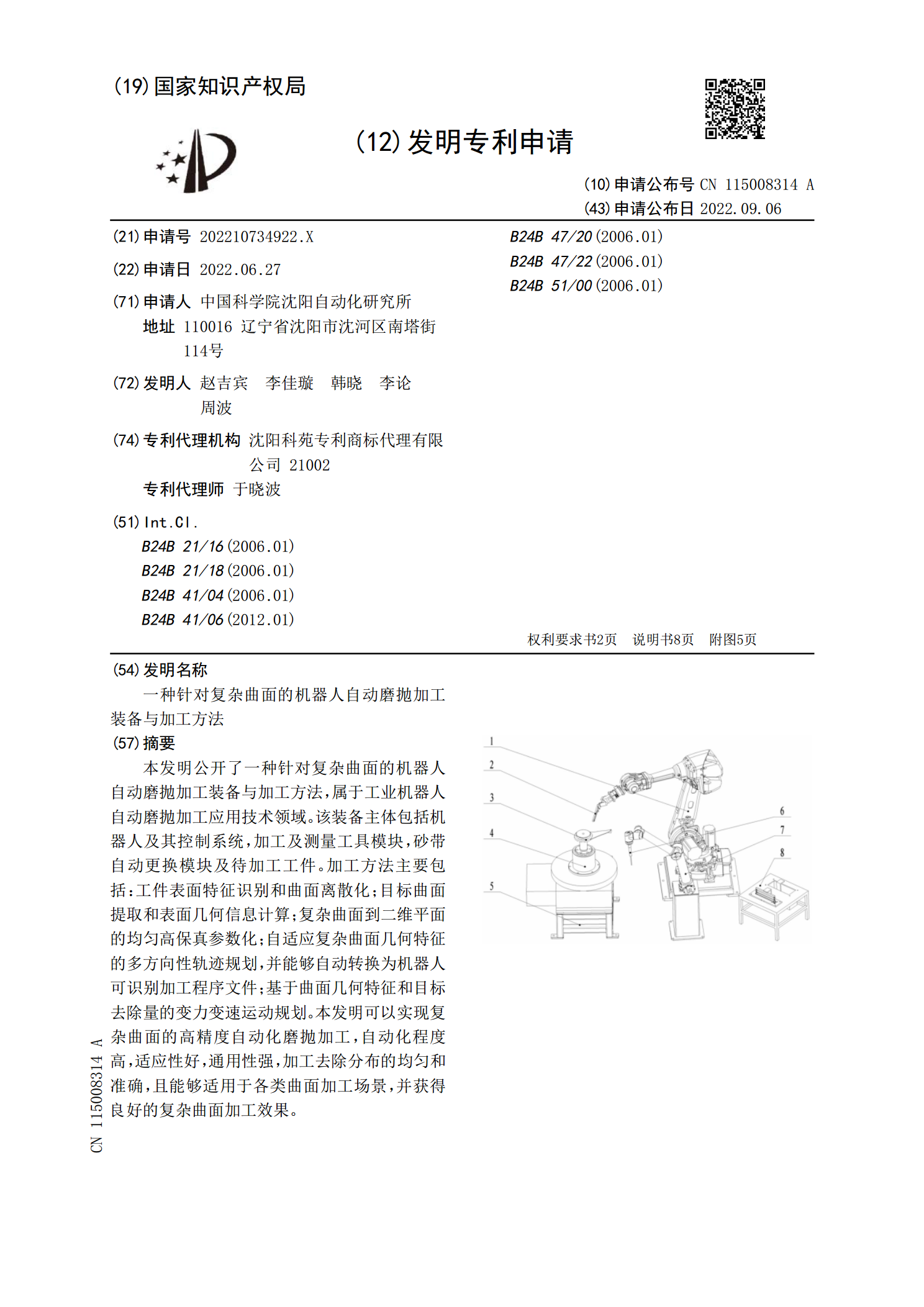
本发明公开了一种针对复杂曲面的机器人自动磨抛加工装备与加工方法,属于工业机器人自动磨抛加工应用技术领域。该装备主体包括机器人及其控制系统,加工及测量工具模块,砂带自动更换模块及待加工工件。加工方法主要包括:工件表面特征识别和曲面离散化;目标曲面提取和表面几何信息计算;复杂曲面到二维平面的均匀高保真参数化;自适应复杂曲面几何特征的多方向性轨迹规划,并能够自动转换为机器人可识别加工程序文件;基于曲面几何特征和目标去除量的变力变速运动规划。本发明可以实现复杂曲面的高精度自动化磨抛加工,自动化程度高,适应性好,通

一种涡轮冷效试验叶片复杂型面的覆盖及磨抛加工方法.pdf
本发明公开一种涡轮冷效试验叶片复杂型面的覆盖及磨抛加工方法,步骤一:埋设热电偶;步骤二:遮挡叶片;通过遮挡保护层对叶片表面局部区域进行遮护;步骤三:叶片清洁;对遮护后的叶片表面进行清洁,对遮护后的叶片表面进行吹砂、吹扫和清洗处理;步骤四:叶片表面喷涂;对清洁后的叶片表面喷涂金属涂层,覆盖热电偶并充满槽道,然后对热电偶阻值和绝缘进行检测;步骤五:叶片表面打磨;去除叶片表面的遮挡保护层,对叶片表面突出的金属涂层进行打磨。本发明不仅实现了对预埋热电偶的保护,实现了测温的准确性及稳定性,同时最大程度保持了叶片原有

全自动水钻磨抛加工中抛轮自动修磨装置.pdf
本发明涉及一种全自动水钻磨抛加工中抛轮自动修磨装置。它是在自动抛光加工的设备上,增加一套修磨刀具,由两套径向进给组件和一套轴向走刀组件组成,修磨刀具安装于轴向走刀组件上,轴向走刀组件安装于径向进给组件上。通过轴向走刀组件的电机驱动直线运动机构,实现刀具的轴向走刀;由步进电机驱动径向进给机构,根据PLC指令进行径向进给运动,实现抛轮修磨所需的进给量。本发明采用在自动加工的设备上配置自动修磨的装置,使抛轮的修磨无需从设备上拆卸下来,从而大大降低了修磨的时间,也无需重新调整,只需配置针排位置自动补偿装置,即可继

面向复杂型面的机器人磨抛定量去除方法研究.docx
面向复杂型面的机器人磨抛定量去除方法研究面向复杂型面的机器人磨抛定量去除方法研究摘要:机器人磨抛技术在现代制造业中得到了广泛应用,但面向复杂型面的机器人磨抛定量去除方法仍然存在一定的挑战和困难。针对这一问题,本文综述了近年来关于面向复杂型面的机器人磨抛定量去除方法的研究,并分析了存在的问题和挑战。在此基础上,本文提出了一种基于深度学习的机器人磨抛定量去除方法,并进行了实验验证。实验结果表明,该方法能够有效地实现面向复杂型面的磨抛定量去除,具有较好的应用前景。关键词:机器人磨抛;复杂型面;定量去除;深度学习

一种压气机叶片机器人砂带磨抛加工方法.pdf
本发明公开了一种压气机叶片机器人砂带磨抛加工方法,包括S100:搭建机器人磨抛系统,并对机器人进行标定和运动路径规划;S200:以砂带型号、粒度和磨抛机接触轮半径为已知量,以机器人进给速度、砂带线速度和磨削力作为磨抛变量,进行正交实验,并通过机器人磨抛系统对叶片进行磨抛实验;获得磨抛叶片样本;S300:测量所述磨抛叶片样本的磨削深度、表面粗糙度及表面形貌特征,并建立考虑切入切出过磨或欠磨现象的切入、中间、切出部分材料去除率模型;S400:根据所述材料去除率模型,分析其主要影响因素,优化调整切入、切出时所述