
无人驾驶车辆的控制方法、装置、电子设备和存储介质.pdf

一条****丹淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人驾驶车辆的控制方法、装置、电子设备和存储介质.pdf
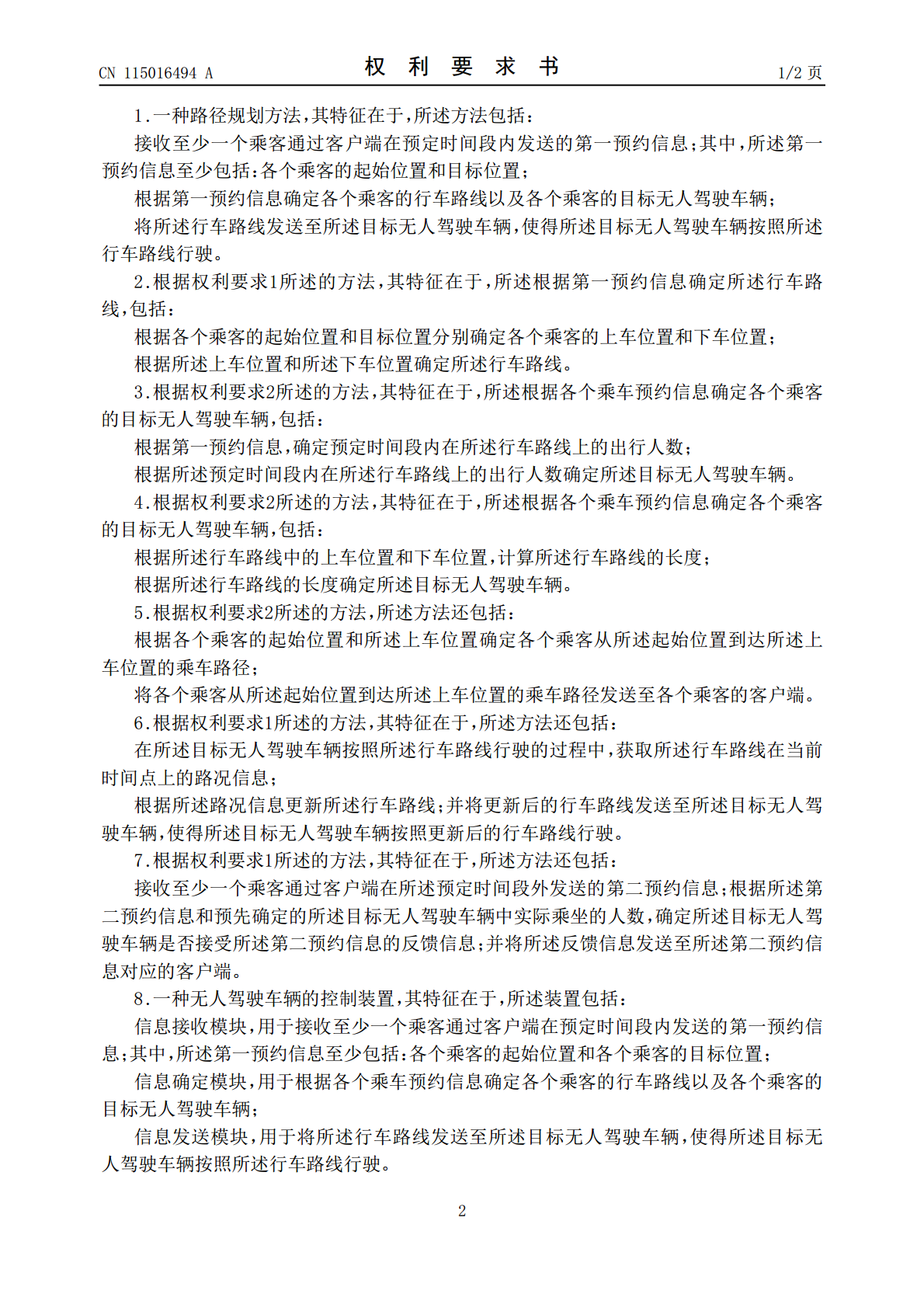
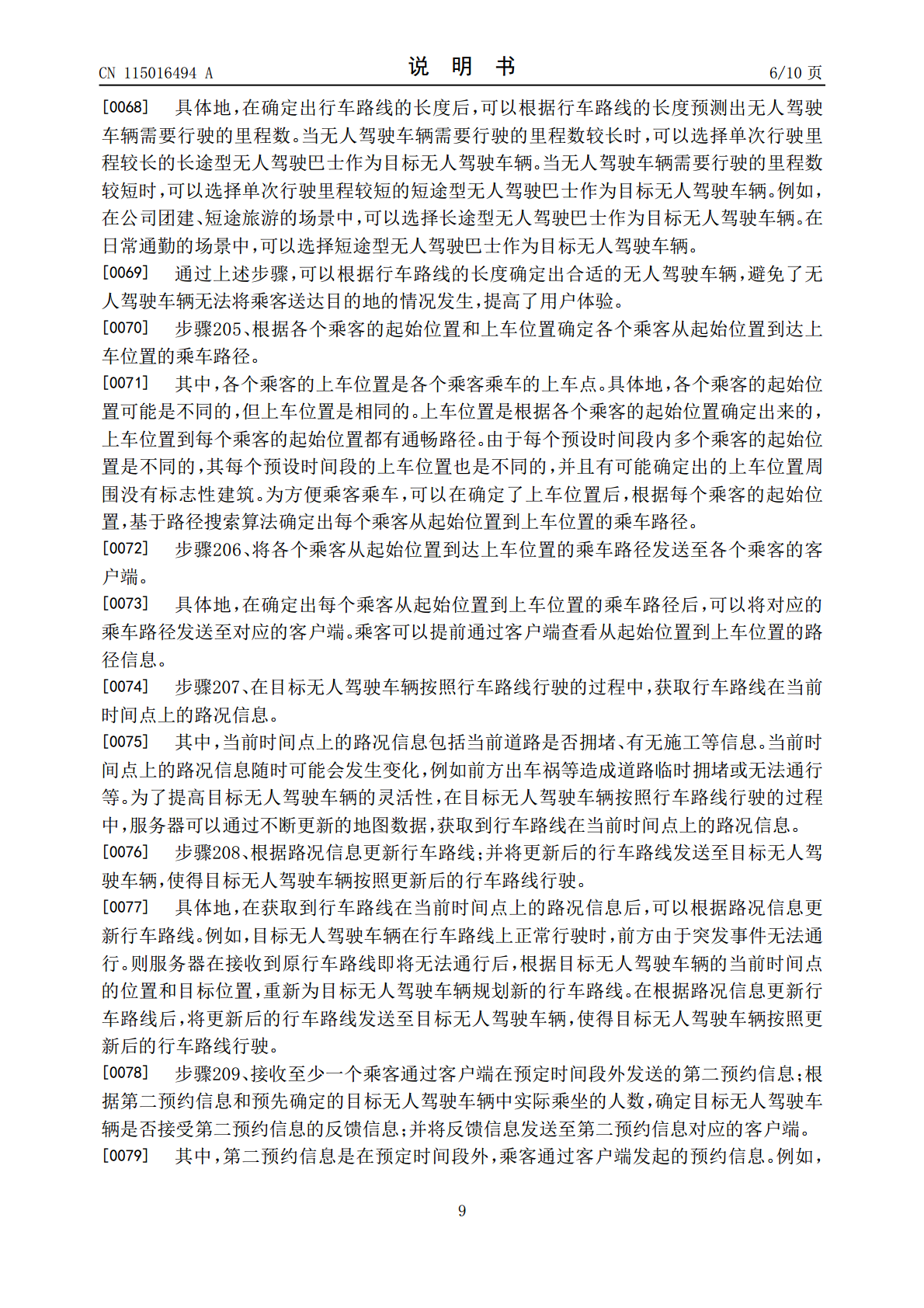
本发明实施例公开了一种无人驾驶车辆的控制方法、装置、电子设备和存储介质。该方法包括:接收至少一个乘客通过客户端在预定时间段内发送的第一预约信息;其中,第一预约信息至少包括:各个乘客的起始位置和各个乘客的目标位置;根据第一预约信息确定各个乘客的行车路线以及各个乘客的目标无人驾驶车辆;将行车路线发送至目标无人驾驶车辆,使得目标无人驾驶车辆按照行车路线行驶。本发明实施例的方法,可以根据多个乘客的预约信息,为多个乘客规划出一条合理的行车路线,实现快速高效的对多个乘客进行点对点的接送服务。并且可以根据预约信息确定出
车辆控制方法、装置、存储介质、电子设备和车辆.pdf
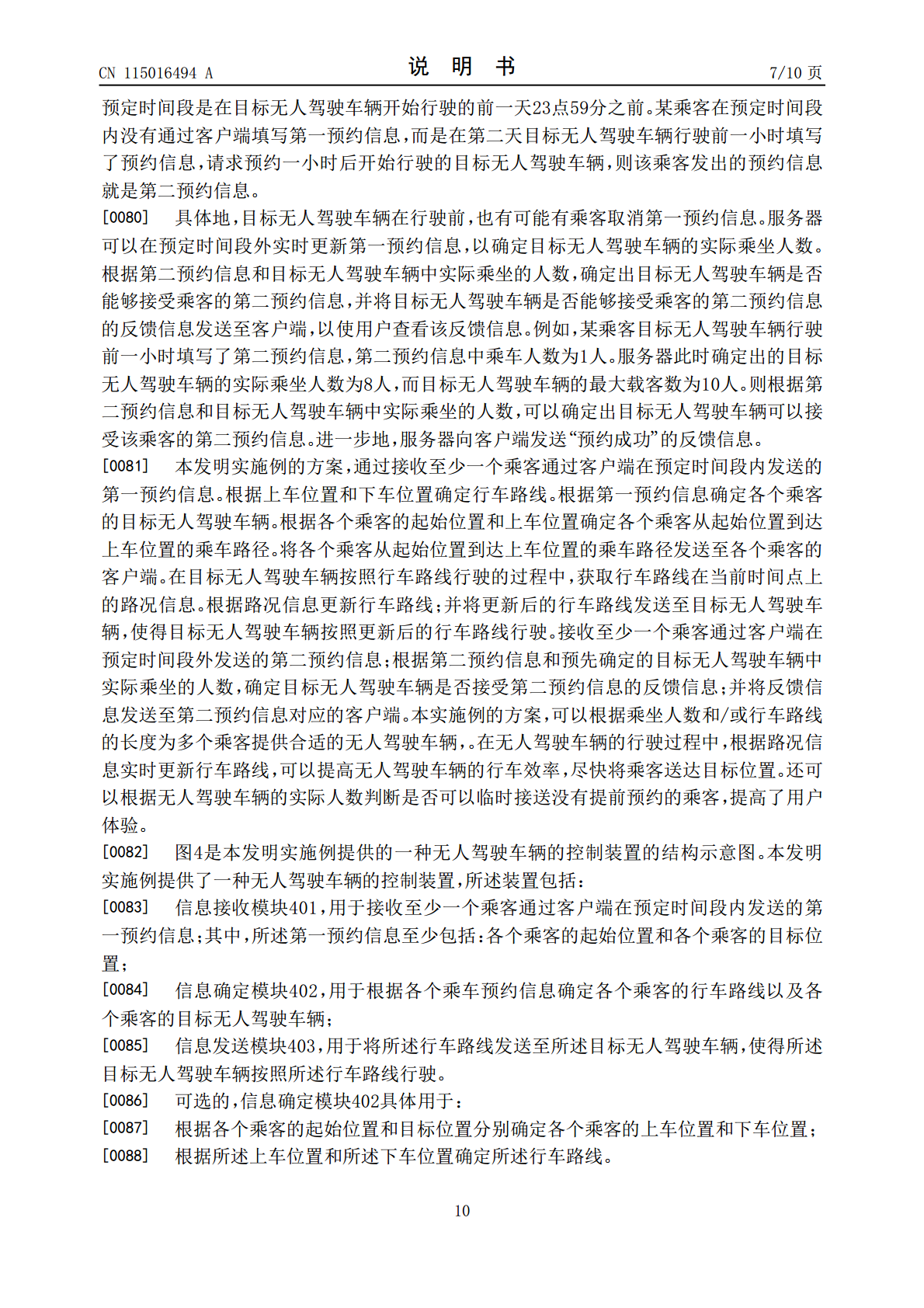
本发明公开了一种车辆控制方法、装置、存储介质、电子设备和车辆,其中,方法包括以下步骤:在车辆滑行降挡过程中,获取车辆的离合器所处的阶段,其中,阶段包括充油阶段、转速同步阶段和动力扭矩交互阶段;如果离合器处于充油阶段或转速同步阶段,且检测到油门踏板信号,则在离合器处于动力扭矩交互阶段时,获取车辆的发动机扭矩、下一挡离合器扭矩和标定的第一扭矩交互时间;根据发动机扭矩、下一挡离合器扭矩和标定的第一扭矩交互时间,对离合器进行控制。由此,实现离合器扭矩的平稳过渡变化,提高扭矩交换过程对外部激励的抗干扰能力,从而,改
车辆控制的方法、装置、存储介质、电子设备和车辆.pdf
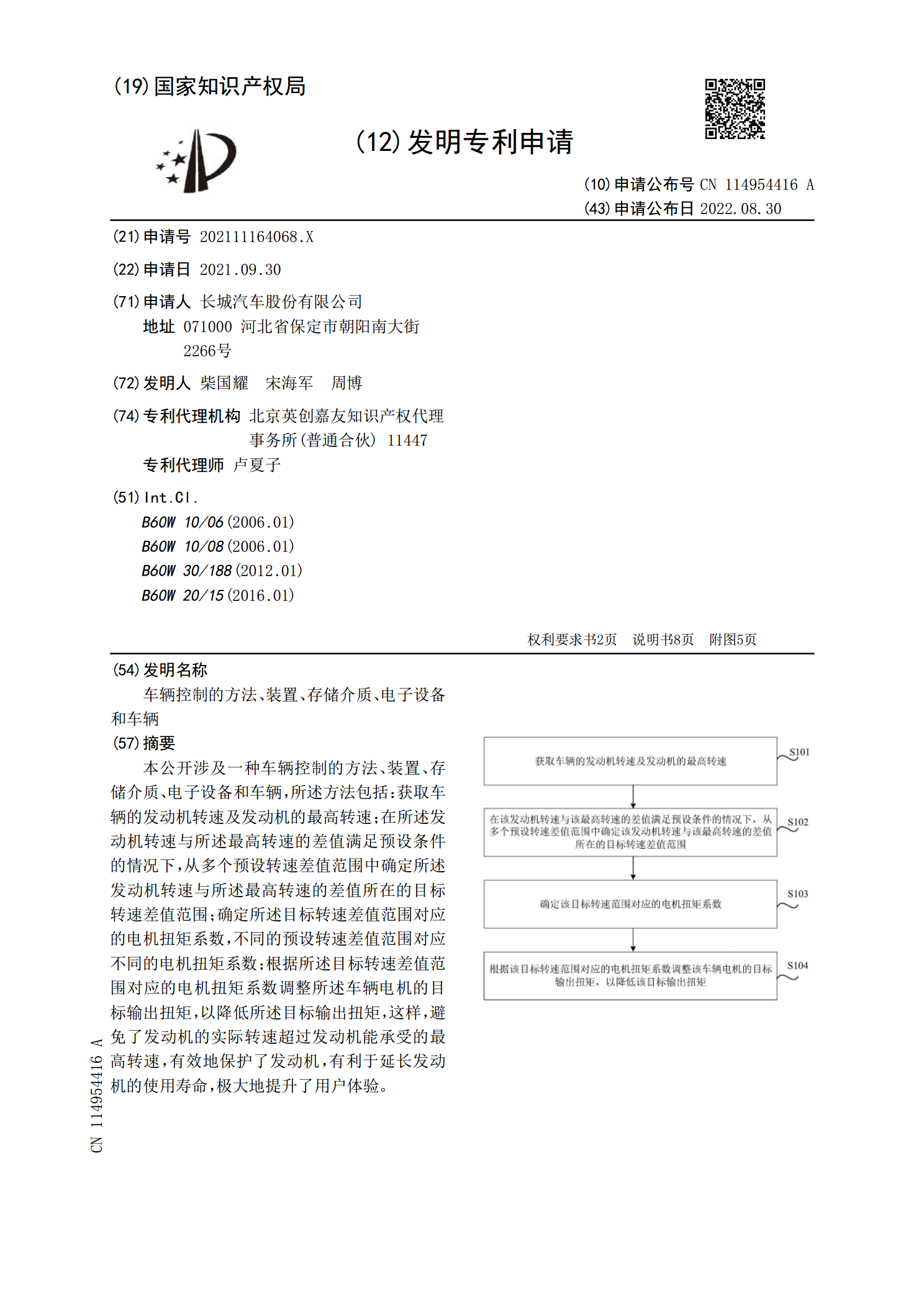
本公开涉及一种车辆控制的方法、装置、存储介质、电子设备和车辆,所述方法包括:获取车辆的发动机转速及发动机的最高转速;在所述发动机转速与所述最高转速的差值满足预设条件的情况下,从多个预设转速差值范围中确定所述发动机转速与所述最高转速的差值所在的目标转速差值范围;确定所述目标转速差值范围对应的电机扭矩系数,不同的预设转速差值范围对应不同的电机扭矩系数;根据所述目标转速差值范围对应的电机扭矩系数调整所述车辆电机的目标输出扭矩,以降低所述目标输出扭矩,这样,避免了发动机的实际转速超过发动机能承受的最高转速,有效地

车辆控制方法、装置、设备、无人驾驶车辆及存储介质.pdf
本发明实施例提供一种车辆控制方法、装置、设备、无人驾驶车辆及存储介质。本发明实施例的方法,通过根据用户的辆召唤指令获取召唤车辆的用户的身份标识信息和位置,控制车辆前往所述用户所在的位置,使得用户无需步行前往固定乘车地点乘车,在游乐场所内的任何位置均可以自主地召唤车辆;车载终端根据所述用户的身份标识信息,智能地识别出所述用户选定的行驶路线,并在接收到所述用户的发车指令后,自动控制所述车辆沿所述行驶路线行驶,车辆更加智能地为用户提供服务,改善用户体验。
仿真车辆控制方法、装置、电子设备和存储介质.pdf
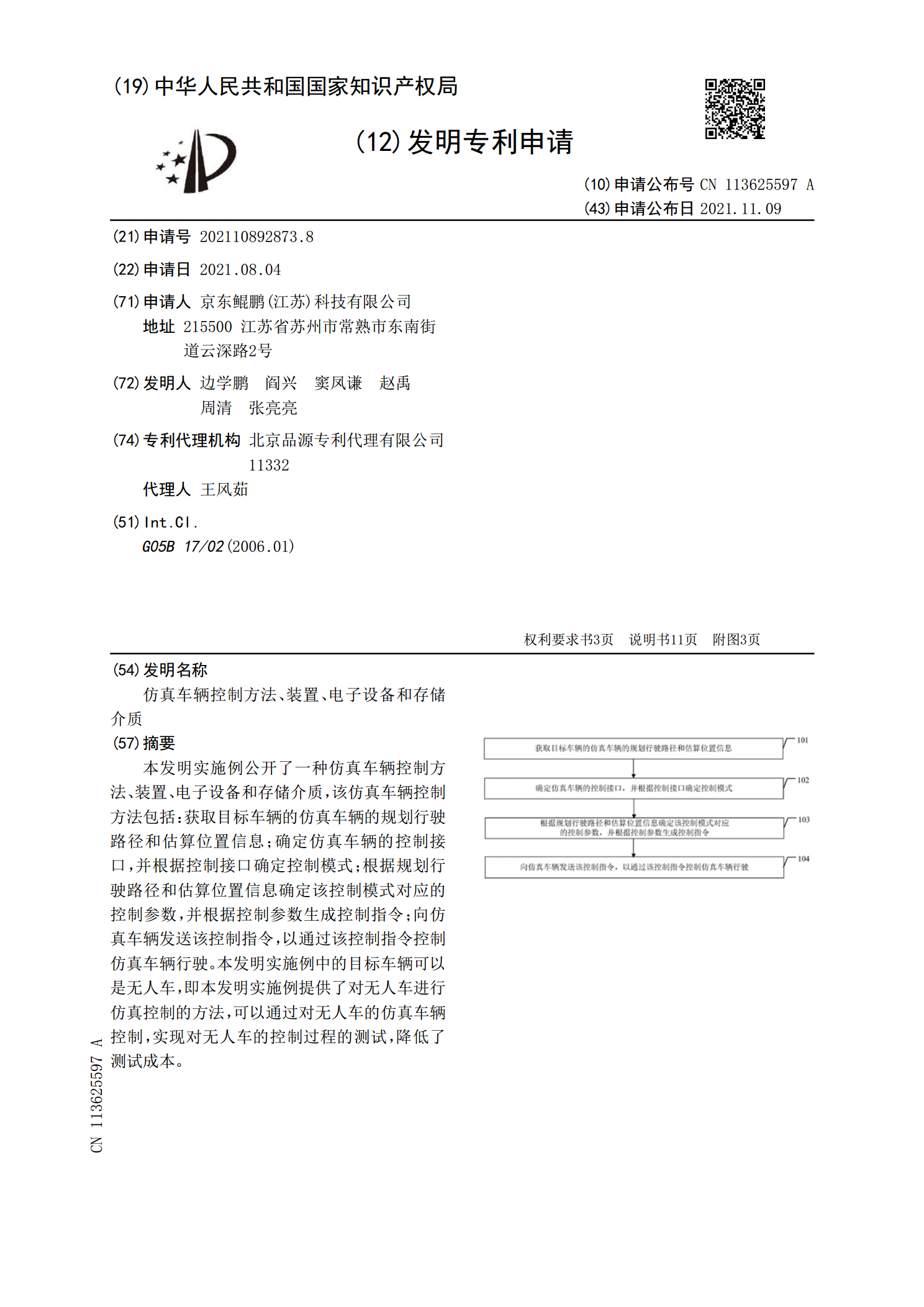
本发明实施例公开了一种仿真车辆控制方法、装置、电子设备和存储介质,该仿真车辆控制方法包括:获取目标车辆的仿真车辆的规划行驶路径和估算位置信息;确定仿真车辆的控制接口,并根据控制接口确定控制模式;根据规划行驶路径和估算位置信息确定该控制模式对应的控制参数,并根据控制参数生成控制指令;向仿真车辆发送该控制指令,以通过该控制指令控制仿真车辆行驶。本发明实施例中的目标车辆可以是无人车,即本发明实施例提供了对无人车进行仿真控制的方法,可以通过对无人车的仿真车辆控制,实现对无人车的控制过程的测试,降低了测试成本。