
掘进机控制方法及装置、掘进机.pdf

一条****彩妍


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

掘进机控制方法及装置、掘进机.pdf
本发明涉及机械控制领域,提供一种掘进机控制方法及装置、掘进机,其中方法包括:采集掘进机的至少一个输料设备的目标信息,其中,所述输料设备的目标信息用于表征所述输料设备的输料情况;基于所述至少一个输料设备的目标信息,控制所述掘进机的截割作业。解决了现有技术中截割速度会影响掘进机的输料设备,经常会造成掘进机的输料设备的故障,导致截割作业的效率降低的问题,基于该至少一个输料设备的目标信息,来自动控制掘进机的截割作业,无需人工控制,提升了自动化率,可以自动适应输料设备的输料情况,从而可以提升掘进机的截割作业的控制的
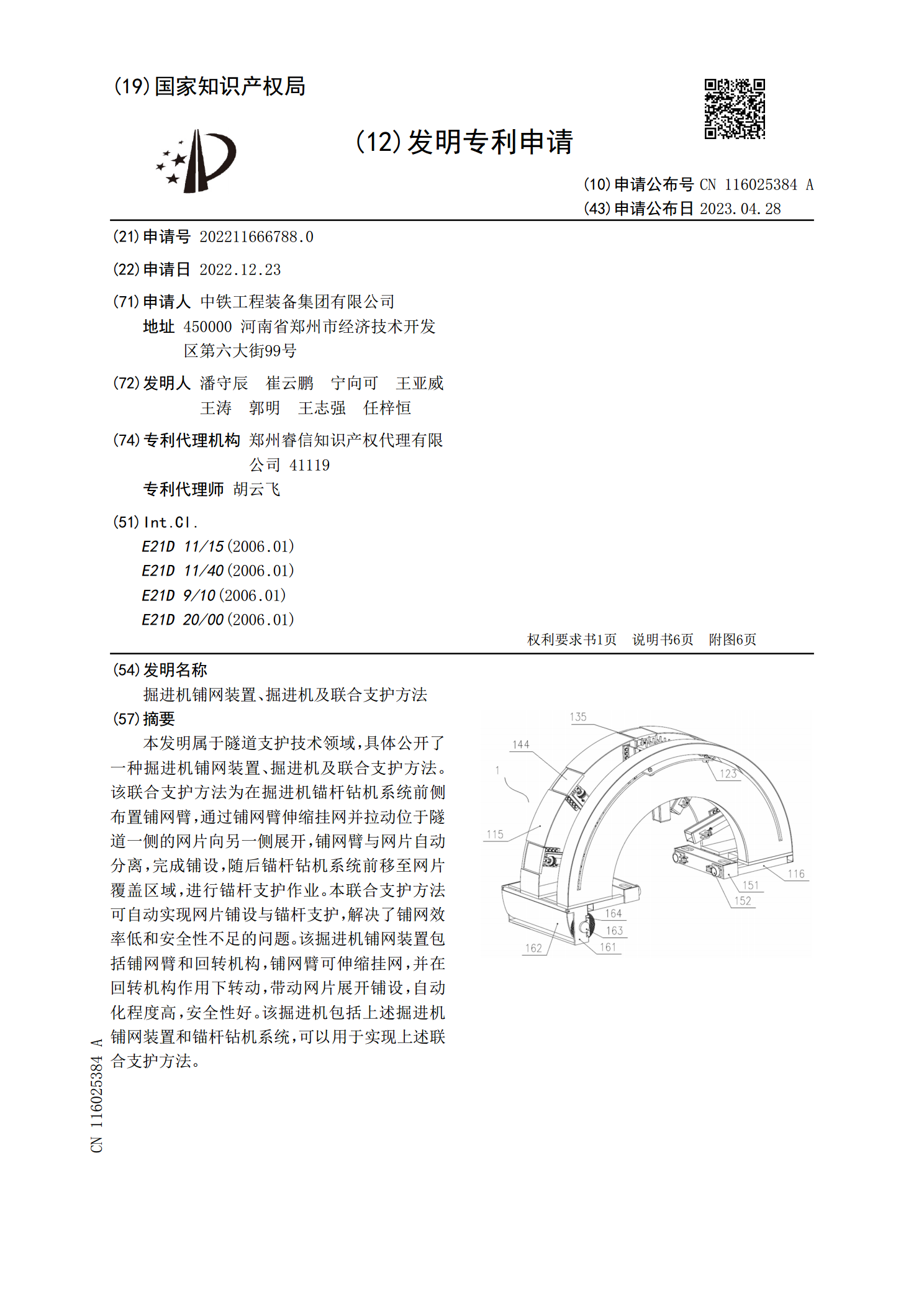
掘进机铺网装置、掘进机及联合支护方法.pdf
本发明属于隧道支护技术领域,具体公开了一种掘进机铺网装置、掘进机及联合支护方法。该联合支护方法为在掘进机锚杆钻机系统前侧布置铺网臂,通过铺网臂伸缩挂网并拉动位于隧道一侧的网片向另一侧展开,铺网臂与网片自动分离,完成铺设,随后锚杆钻机系统前移至网片覆盖区域,进行锚杆支护作业。本联合支护方法可自动实现网片铺设与锚杆支护,解决了铺网效率低和安全性不足的问题。该掘进机铺网装置包括铺网臂和回转机构,铺网臂可伸缩挂网,并在回转机构作用下转动,带动网片展开铺设,自动化程度高,安全性好。该掘进机包括上述掘进机铺网装置和锚
掘进机截割臂伸缩控制方法及装置.pdf
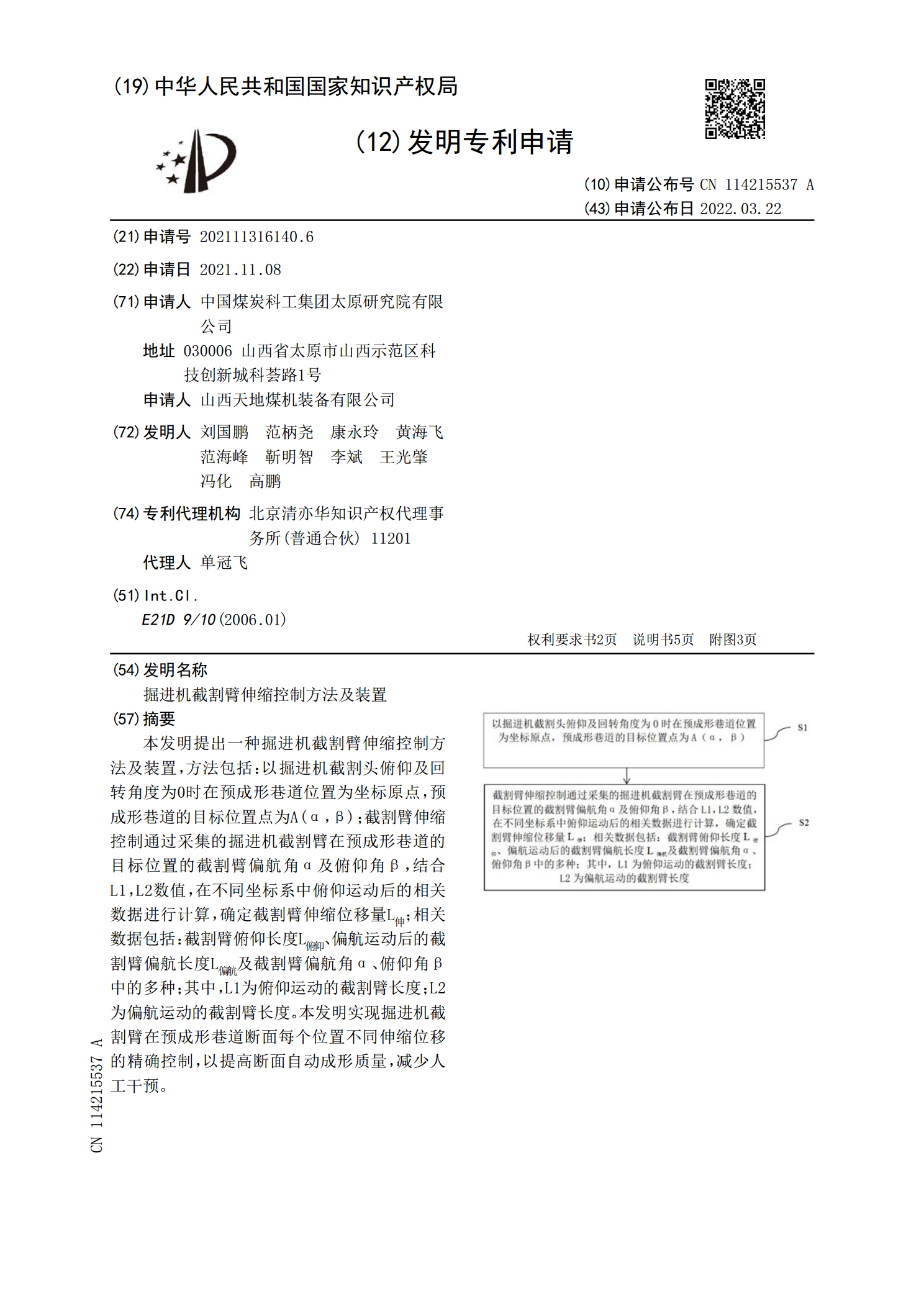
本发明提出一种掘进机截割臂伸缩控制方法及装置,方法包括:以掘进机截割头俯仰及回转角度为0时在预成形巷道位置为坐标原点,预成形巷道的目标位置点为A(α,β);截割臂伸缩控制通过采集的掘进机截割臂在预成形巷道的目标位置的截割臂偏航角α及俯仰角β,结合L1,L2数值,在不同坐标系中俯仰运动后的相关数据进行计算,确定截割臂伸缩位移量L

掘进机用管片拼装机旋转控制方法及装置.pdf
本发明公开了一种掘进机用管片拼装机旋转控制方法及装置,所述方法包括步骤:通过设在管片拼装机的移动架(7)上的两个第一感应元件(2)输出的波形图来分别判断管片拼装机的正反旋转方向;通过两个第一感应元件(2)输出的波形图来计算设在管片拼装机的回转支承(6)上的检测齿轮(3)所转过的齿数,以及根据检测齿轮(3)所转过的齿数来计算管片拼装机实时的转动角度。

掘进机控制方法及系统、可移动智能终端和掘进机.pdf
本公开提供一种掘进机控制方法及系统、可移动智能终端和掘进机,涉及矿山安全技术领域,能够解决现有的掘进机控制方式不够灵活、局限性较高的问题。具体技术方案为:判断可移动智能终端是否进入矿井设定的工作区域内;若是,则获取目标掘进机当前设置的工作模式,其中的目标掘进机与可移动智能终端通过专用5G网络通信,该工作模式包括本地模式、遥控模式或智能终端模式;当判断出可移动智能终端进入矿井设定的工作区域内且目标掘进机当前设置的工作模式为智能终端模式时,根据第一预设规则激活可移动智能终端中的掘进机智能控制功能;在掘进机智能