
掘进机用管片拼装机旋转控制方法及装置.pdf

星菱****23


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

掘进机用管片拼装机旋转控制方法及装置.pdf
本发明公开了一种掘进机用管片拼装机旋转控制方法及装置,所述方法包括步骤:通过设在管片拼装机的移动架(7)上的两个第一感应元件(2)输出的波形图来分别判断管片拼装机的正反旋转方向;通过两个第一感应元件(2)输出的波形图来计算设在管片拼装机的回转支承(6)上的检测齿轮(3)所转过的齿数,以及根据检测齿轮(3)所转过的齿数来计算管片拼装机实时的转动角度。

一种小型隧道掘进机用管片拼装装置.pdf
本发明公开了一种小型隧道掘进机用管片拼装装置,驱动装置、固定架、回转支撑轴承、回转架、提升装置、滑动架、滑动油缸和防摇油缸,固定架一端固定在盾构体上,另一端与回转支撑轴承的外环连接固定;驱动装置动力输出端的小齿轮与回转支撑轴承内齿圈啮合;回转架套置于回转支撑轴承内齿圈上;回转架下端固定有提升装置;采用了上述技术方案的本发明结构简单,紧凑,重量轻。在满足管片拼装的同时,保证了空间布局的要求,给排碴等部件的安装提供了足够的空间,极为适合小型掘进机施工时使用。

掘进机控制方法及装置、掘进机.pdf
本发明涉及机械控制领域,提供一种掘进机控制方法及装置、掘进机,其中方法包括:采集掘进机的至少一个输料设备的目标信息,其中,所述输料设备的目标信息用于表征所述输料设备的输料情况;基于所述至少一个输料设备的目标信息,控制所述掘进机的截割作业。解决了现有技术中截割速度会影响掘进机的输料设备,经常会造成掘进机的输料设备的故障,导致截割作业的效率降低的问题,基于该至少一个输料设备的目标信息,来自动控制掘进机的截割作业,无需人工控制,提升了自动化率,可以自动适应输料设备的输料情况,从而可以提升掘进机的截割作业的控制的

一种管片拼装机抓取装置.pdf
本发明涉及隧道掘进用的管片拼装机技术领域,具体涉及一种管片拼装机抓取装置,管片拼装机抓取装置包括抓取梁,抓取梁中部转动装配有转轴,还包括驱动转轴旋转的第一驱动机构和位于抓取梁下方的压盘,压盘和抓取梁之间连接有驱动压盘上下移动的第二驱动机构;转轴包括贯穿压盘的转动杆,转动杆下端设有穿过管片上的插入口伸入管片的抓取腔中并进行转动的抓取头,抓取头位于压盘下方,抓取头具有朝上设置的与抓取腔上腔壁挡止配合的挡止面,压盘具有朝下设置的压紧管片表面与挡止面配合以夹紧管片的压紧面。本发明可以实现自动化操作,不需要人工先将
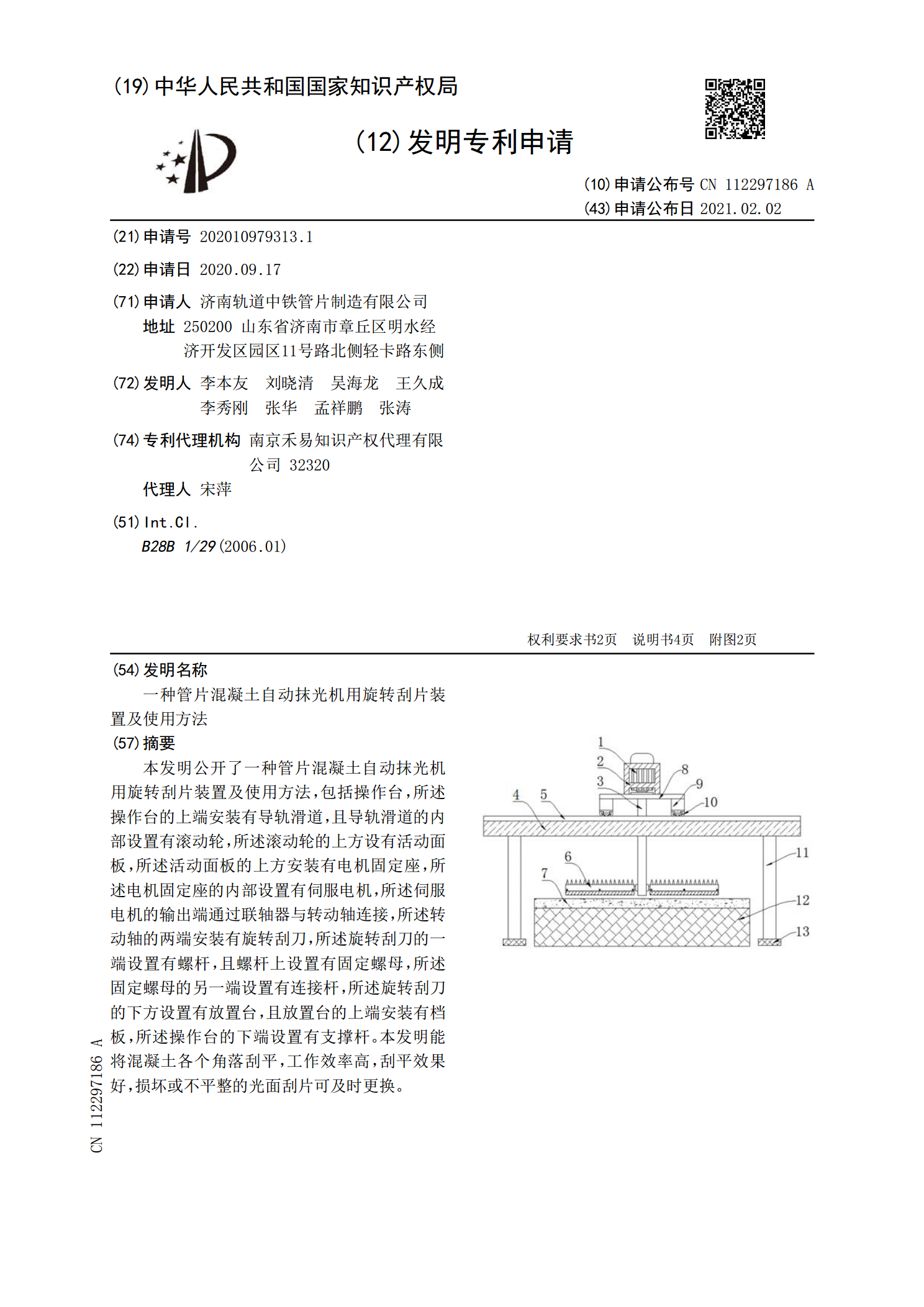
一种管片混凝土自动抹光机用旋转刮片装置及使用方法.pdf
本发明公开了一种管片混凝土自动抹光机用旋转刮片装置及使用方法,包括操作台,所述操作台的上端安装有导轨滑道,且导轨滑道的内部设置有滚动轮,所述滚动轮的上方设有活动面板,所述活动面板的上方安装有电机固定座,所述电机固定座的内部设置有伺服电机,所述伺服电机的输出端通过联轴器与转动轴连接,所述转动轴的两端安装有旋转刮刀,所述旋转刮刀的一端设置有螺杆,且螺杆上设置有固定螺母,所述固定螺母的另一端设置有连接杆,所述旋转刮刀的下方设置有放置台,且放置台的上端安装有档板,所述操作台的下端设置有支撑杆。本发明能将混凝土各个