
装卸系统、输送系统、控制装置、存储介质及装卸方法.pdf

雨巷****莺莺

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

装卸系统、输送系统、控制装置、存储介质及装卸方法.pdf
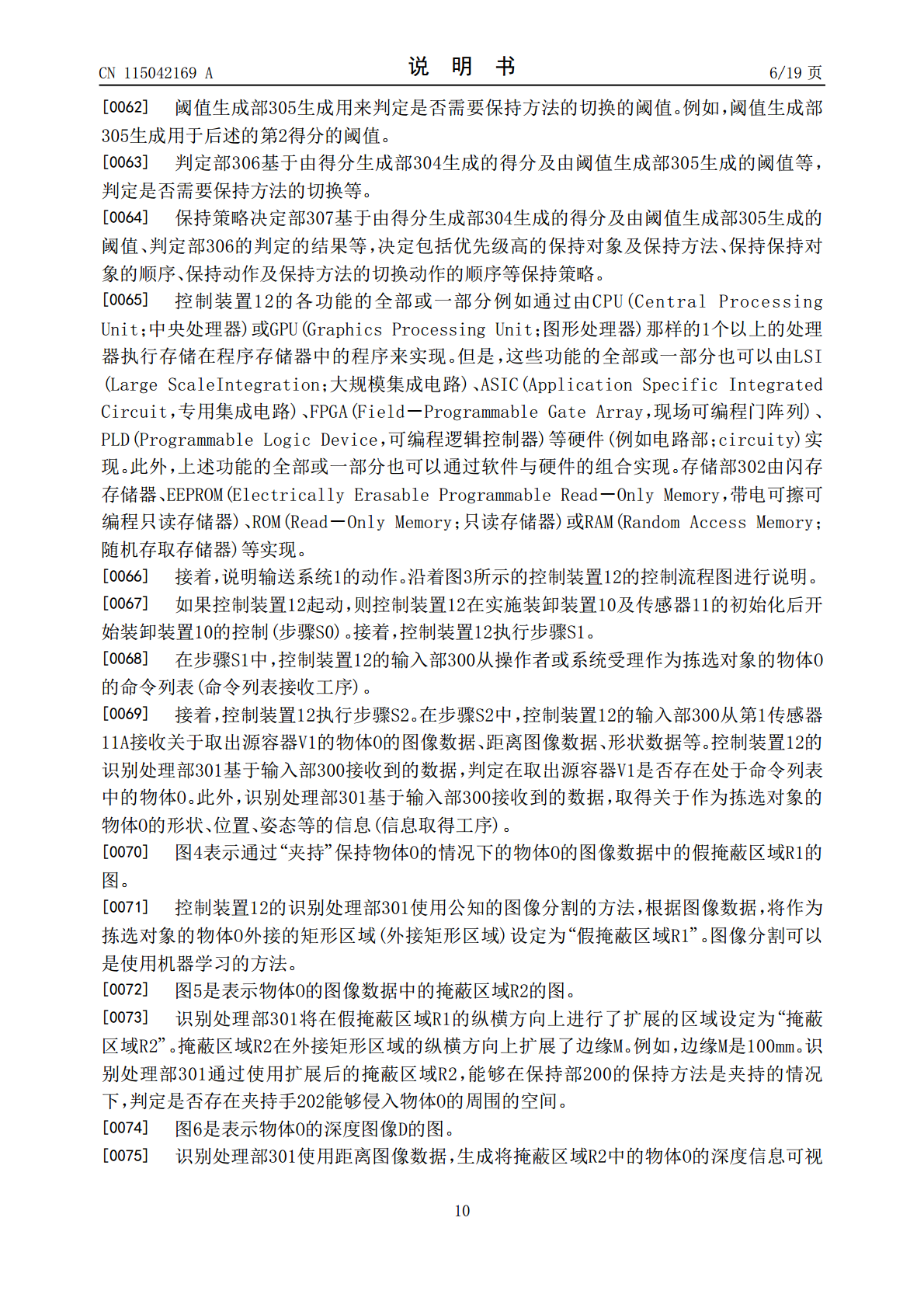
目的是提供一种能够缩短装卸装置的动作时间的装卸系统、输送系统、控制装置、控制程序及装卸方法。技术方案的装卸系统具有可动臂、保持部、传感器和控制部。上述保持部安装在上述可动臂,能够选择多个保持方法中的一个以上来保持物体。上述传感器能够检测多个上述物体。上述控制部控制上述可动臂及上述保持部。上述控制部基于从上述传感器取得的信息,针对每个上述物体及针对每个保持方法,计算以选择的保持方法为基准的得分。上述控制部基于上述得分,选择下个保持的上述物体及保持方法。上述控制部计算保持选择的上述物体的位置及上述可动臂的姿态
气冷堆燃料装卸系统燃料球计数方法、装置及存储介质.pdf
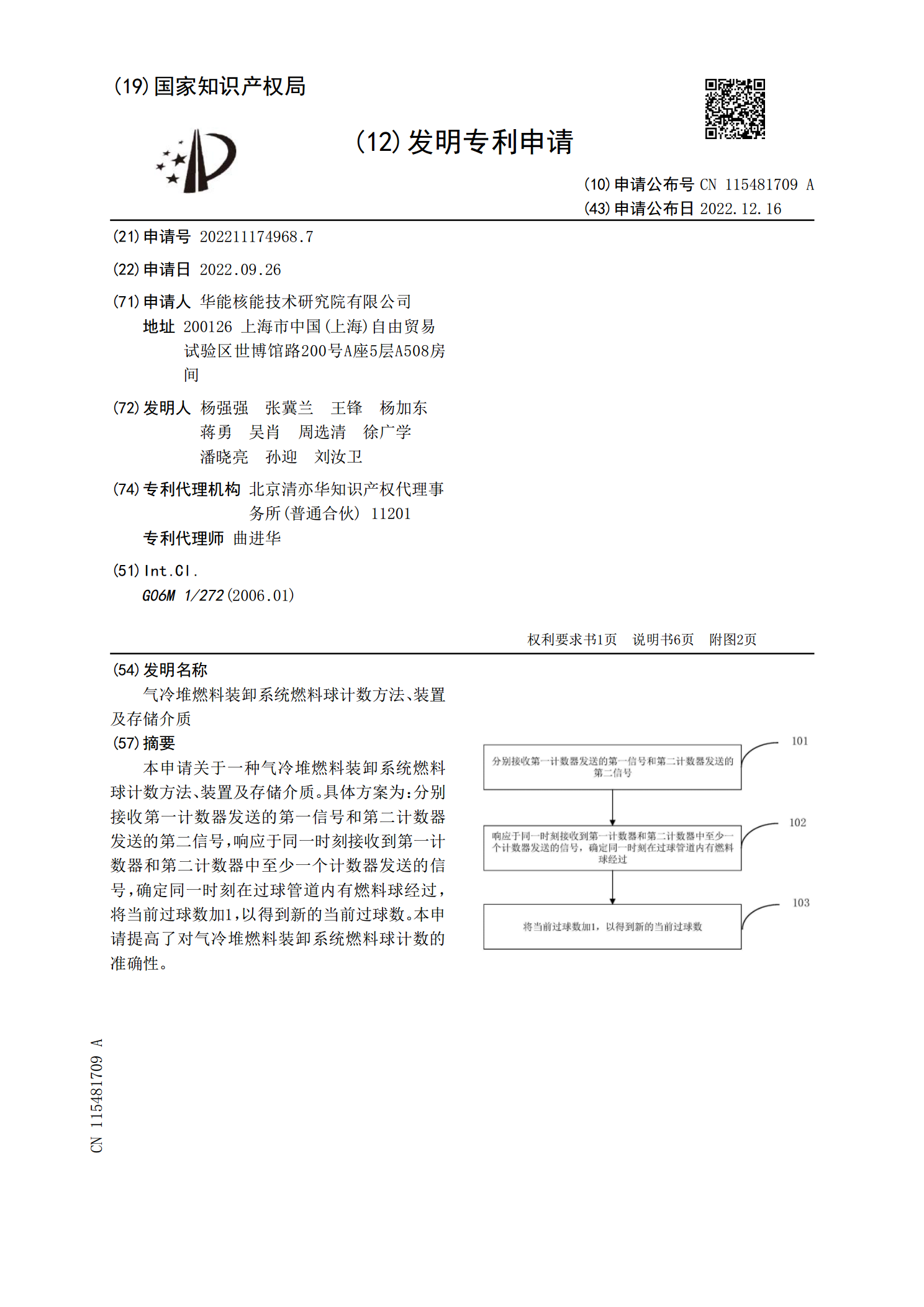
本申请关于一种气冷堆燃料装卸系统燃料球计数方法、装置及存储介质。具体方案为:分别接收第一计数器发送的第一信号和第二计数器发送的第二信号,响应于同一时刻接收到第一计数器和第二计数器中至少一个计数器发送的信号,确定同一时刻在过球管道内有燃料球经过,将当前过球数加1,以得到新的当前过球数。本申请提高了对气冷堆燃料装卸系统燃料球计数的准确性。
货物装卸监控方法、系统、设备及计算机存储介质.pdf
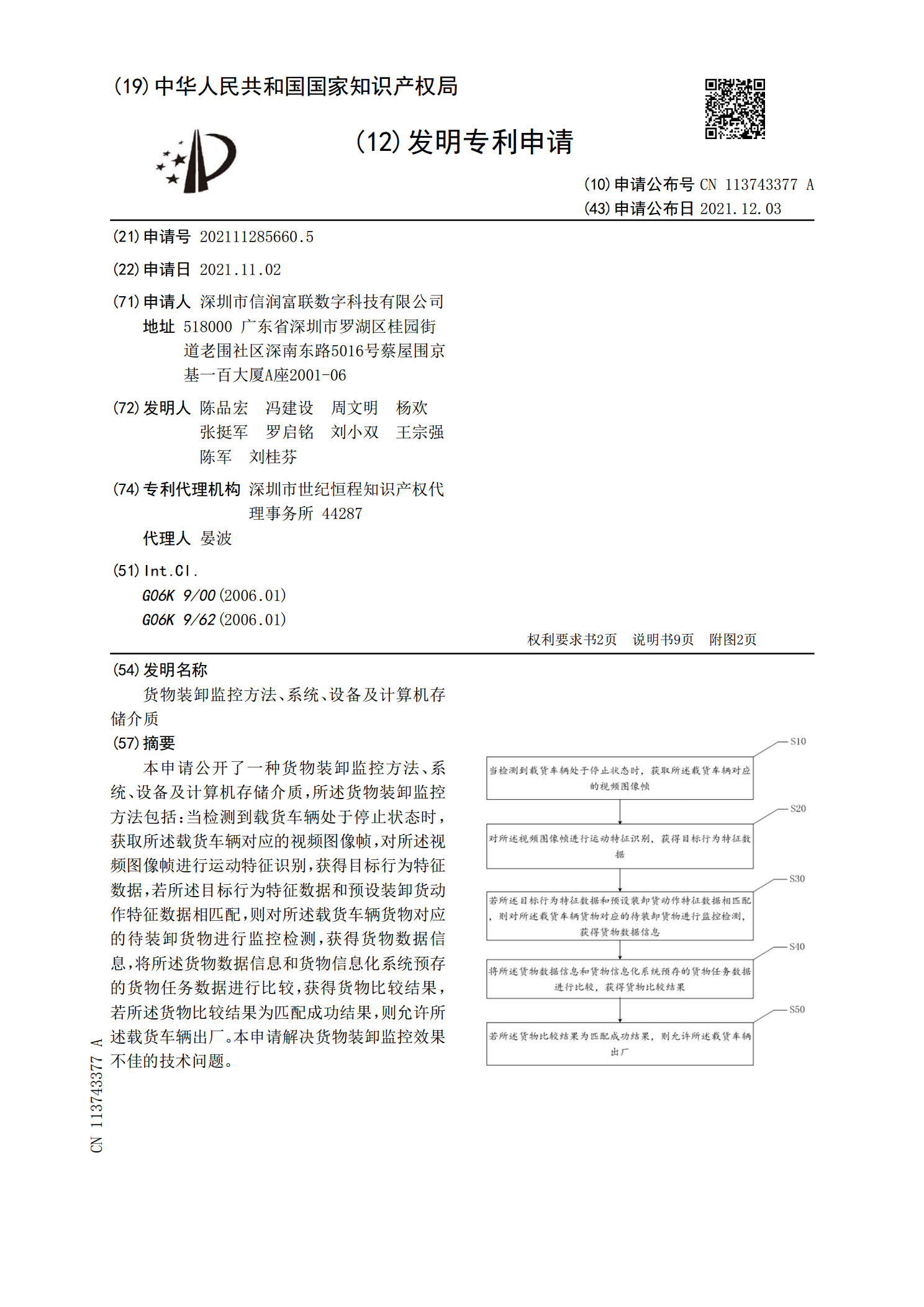
本申请公开了一种货物装卸监控方法、系统、设备及计算机存储介质,所述货物装卸监控方法包括:当检测到载货车辆处于停止状态时,获取所述载货车辆对应的视频图像帧,对所述视频图像帧进行运动特征识别,获得目标行为特征数据,若所述目标行为特征数据和预设装卸货动作特征数据相匹配,则对所述载货车辆货物对应的待装卸货物进行监控检测,获得货物数据信息,将所述货物数据信息和货物信息化系统预存的货物任务数据进行比较,获得货物比较结果,若所述货物比较结果为匹配成功结果,则允许所述载货车辆出厂。本申请解决货物装卸监控效果不佳的技术问题
货物装卸装置、货物输送设备和仓储系统.pdf
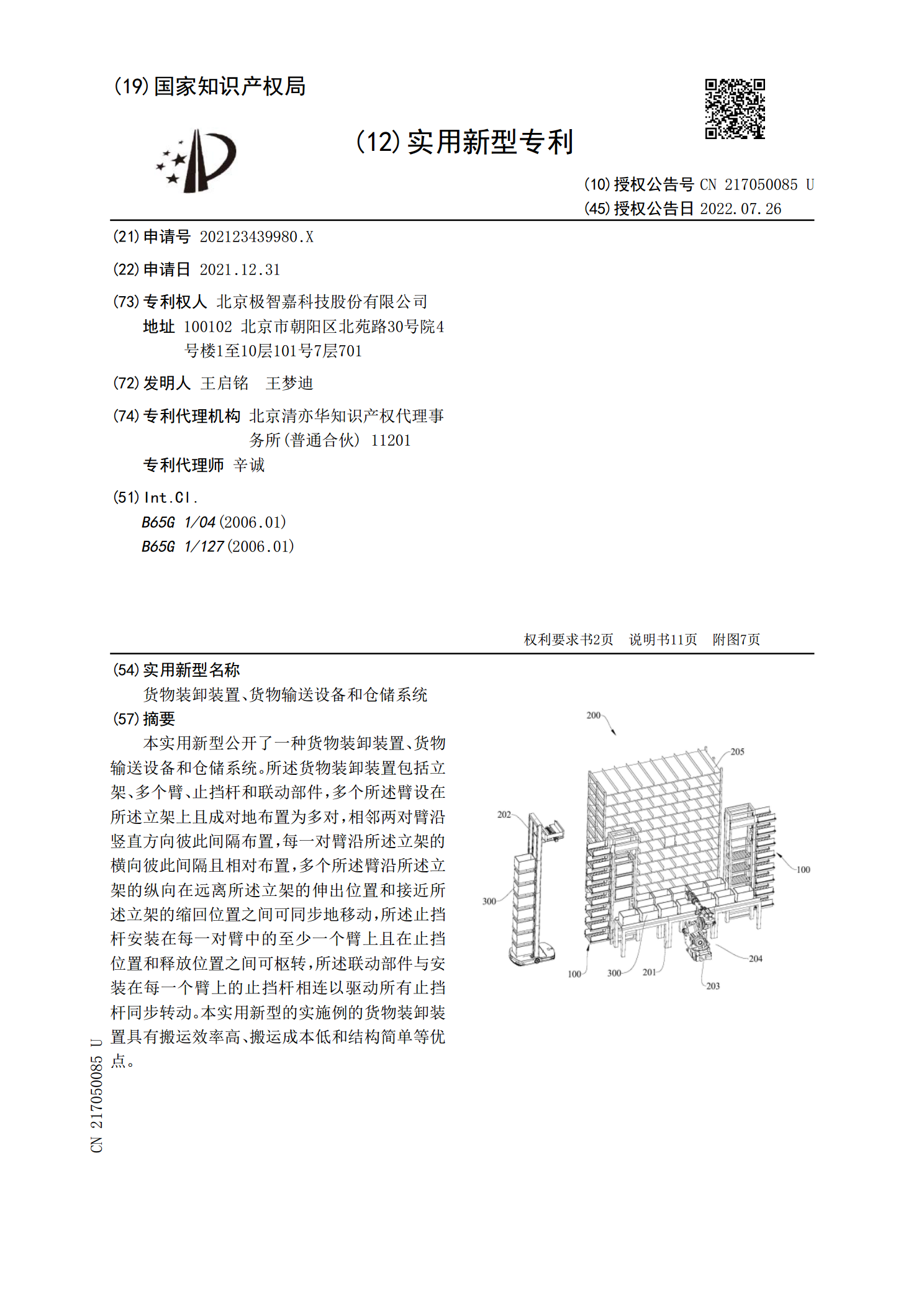
本实用新型公开了一种货物装卸装置、货物输送设备和仓储系统。所述货物装卸装置包括立架、多个臂、止挡杆和联动部件,多个所述臂设在所述立架上且成对地布置为多对,相邻两对臂沿竖直方向彼此间隔布置,每一对臂沿所述立架的横向彼此间隔且相对布置,多个所述臂沿所述立架的纵向在远离所述立架的伸出位置和接近所述立架的缩回位置之间可同步地移动,所述止挡杆安装在每一对臂中的至少一个臂上且在止挡位置和释放位置之间可枢转,所述联动部件与安装在每一个臂上的止挡杆相连以驱动所有止挡杆同步转动。本实用新型的实施例的货物装卸装置具有搬运效率
控制方法、装置、系统及存储介质.pdf
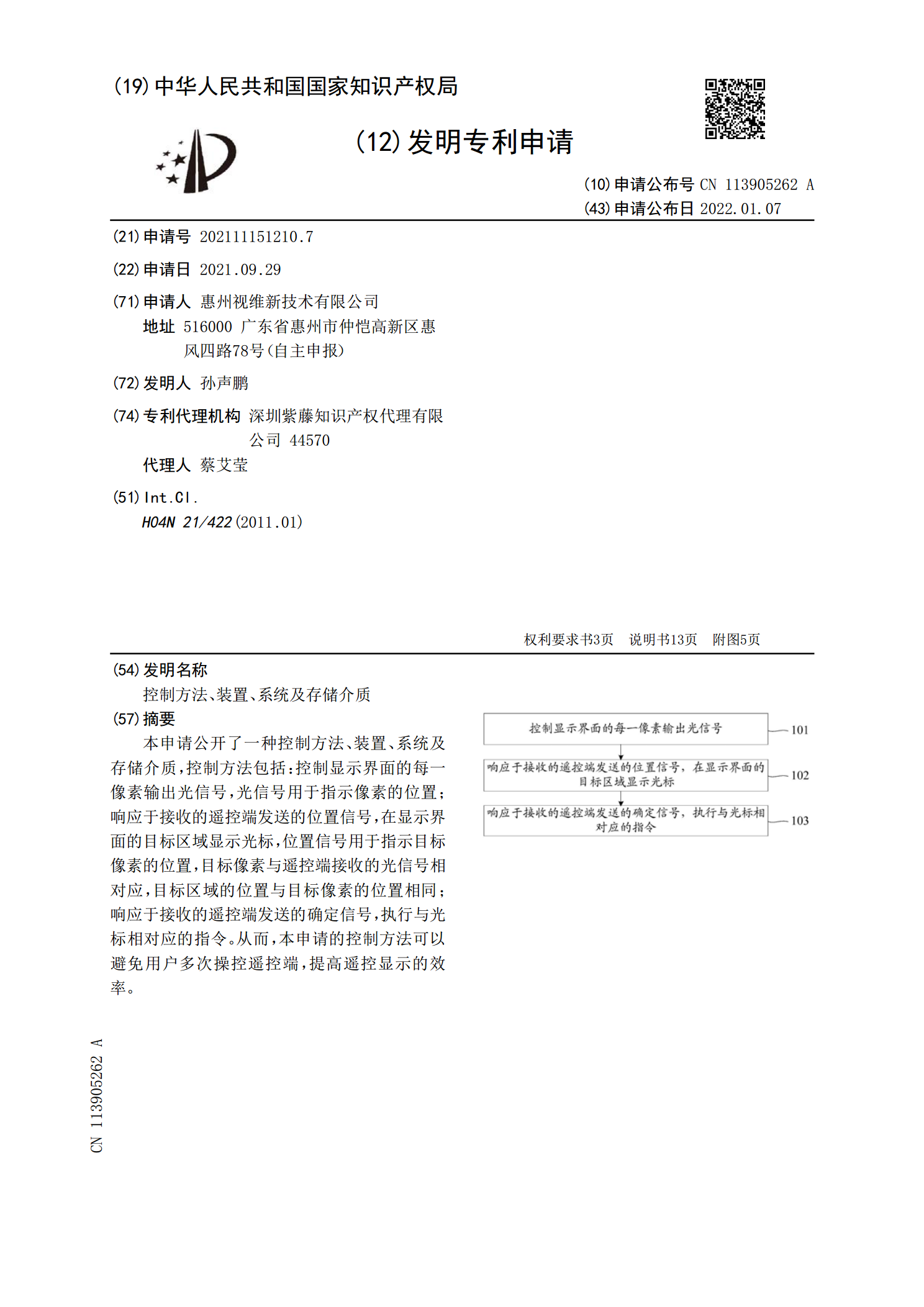
本申请公开了一种控制方法、装置、系统及存储介质,控制方法包括:控制显示界面的每一像素输出光信号,光信号用于指示像素的位置;响应于接收的遥控端发送的位置信号,在显示界面的目标区域显示光标,位置信号用于指示目标像素的位置,目标像素与遥控端接收的光信号相对应,目标区域的位置与目标像素的位置相同;响应于接收的遥控端发送的确定信号,执行与光标相对应的指令。从而,本申请的控制方法可以避免用户多次操控遥控端,提高遥控显示的效率。