
一种VR设备透视的方法、装置、VR设备及介质.pdf

努力****亚捷

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种VR设备透视的方法、装置、VR设备及介质.pdf
本申请公开了一种VR设备透视的方法、装置、VR设备及介质,涉及虚拟现实技术领域。该方法包括:获取待采集对象在当前位置时P‑Sensor的值;根据预先建立的P‑Sensor的值与对应的图像之间的关系确定待采集对象在当前位置时P‑Sensor的值对应的图像。由此可见,该方法中根据预先建立的P‑Sensor的值与对应的图像之间的关系得到待采集对象在当前位置时P‑Sensor的值对应的图像,使得即使物体位于双目相机中间的灰色地带,也可以将图像模拟出来,解决了因CameraFOV导致透过VR设备无法了解到外部环境

基于VR的自由活动方法、VR装置、设备及存储介质.pdf
本发明涉及计算机视觉识别技术领域,公开了一种基于VR的自由活动方法、装置、设备及存储介质,通过根据真实空间中所有物体的第一位置信息,以及VR空间与真实空间的比例,设置VR体验者在VR空间对应虚拟角色的第二位置信息,当VR体验者与真实空间中的部件发生交互时,根据VR体验者的第一位置信息与各部件的第一位置信息计算两者之间的第一空间位置关系,并根据第一空间位置关系和VR空间中对应虚拟部件的第二位置信息,检测VR体验者在真实空间中的高度,并基于高度调整VR体验者对应虚拟角色的高度。用于在大空间VR场景中,在保留自

VR图像处理方法、装置、系统、VR设备及存储介质.pdf
本申请提供的VR图像处理方法、装置、系统、VR设备及存储介质,应用于VR图像技术领域,所述方法包括:获取用户的头部运动状态;在所述用户的头部运动状态为快速运动状态的情况下,减少VR视频中当前帧的高清画面渲染区域,以及增加所述VR视频中当前帧的低清画面渲染区域;显示缩放后的VR视频。本方案通过在用户的头部快速运动的情况下将VR视频中高清画面渲染区域进行减少,并将低清画面渲染区域进行增加,由于用户的头部快速运动时其视觉对于VR视频的画面清晰度的敏感度较低,因此可以在不影响用户对于VR视频的观看体验的情况下,减
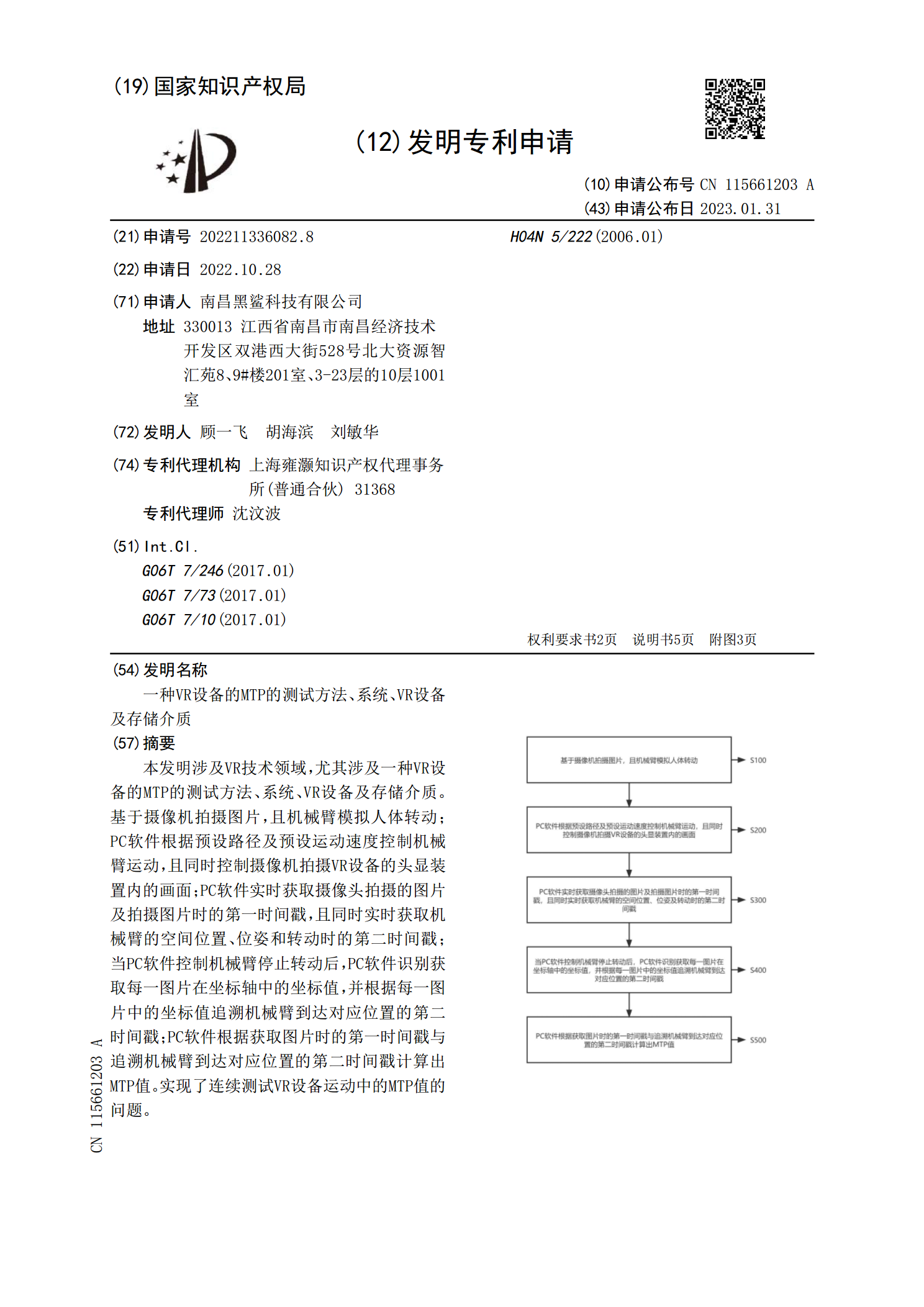
一种VR设备的MTP的测试方法、系统、VR设备及存储介质.pdf
本发明涉及VR技术领域,尤其涉及一种VR设备的MTP的测试方法、系统、VR设备及存储介质。基于摄像机拍摄图片,且机械臂模拟人体转动;PC软件根据预设路径及预设运动速度控制机械臂运动,且同时控制摄像机拍摄VR设备的头显装置内的画面;PC软件实时获取摄像头拍摄的图片及拍摄图片时的第一时间戳,且同时实时获取机械臂的空间位置、位姿和转动时的第二时间戳;当PC软件控制机械臂停止转动后,PC软件识别获取每一图片在坐标轴中的坐标值,并根据每一图片中的坐标值追溯机械臂到达对应位置的第二时间戳;PC软件根据获取图片时的第一
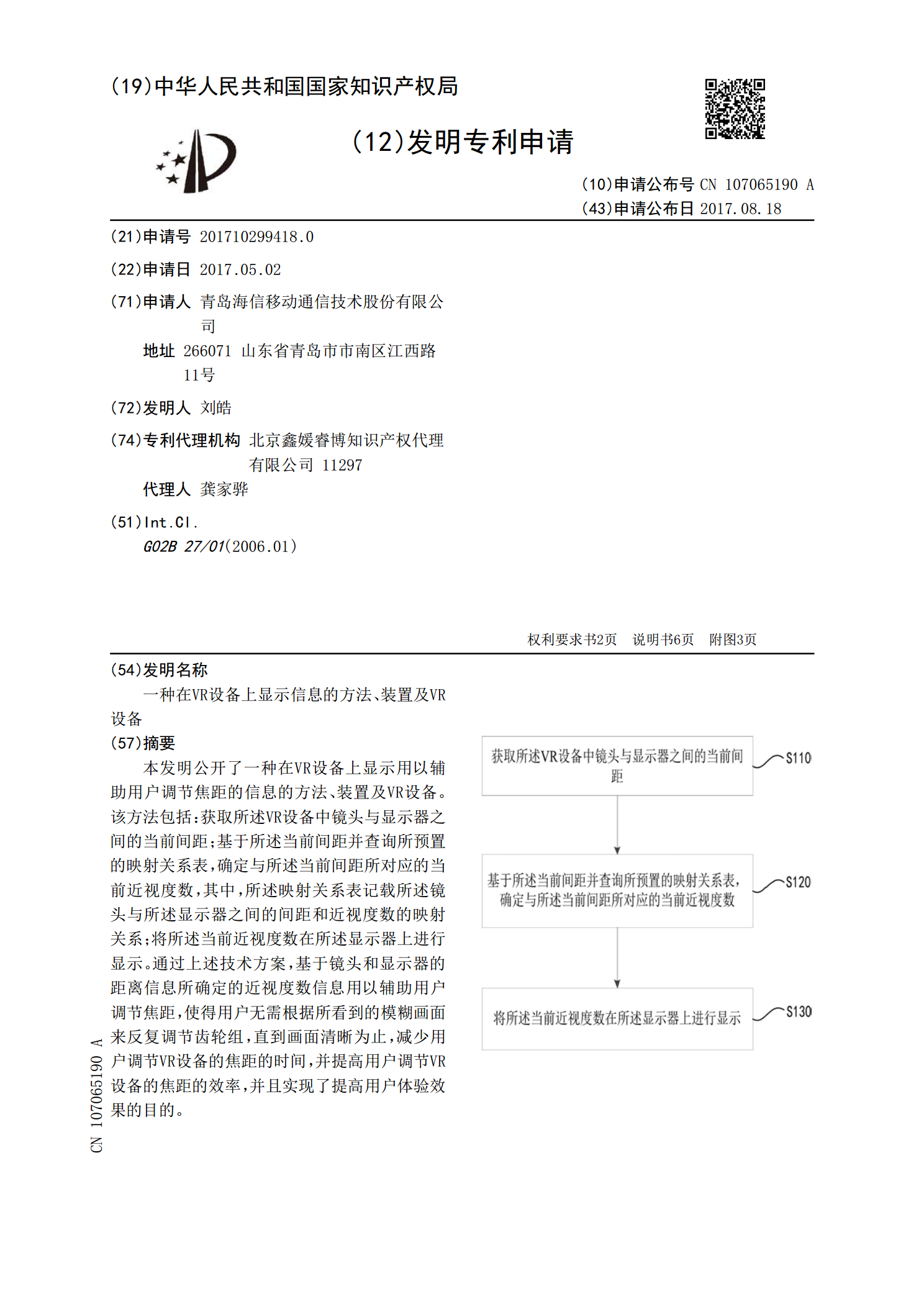
一种在VR设备上显示信息的方法、装置及VR设备.pdf
本发明公开了一种在VR设备上显示用以辅助用户调节焦距的信息的方法、装置及VR设备。该方法包括:获取所述VR设备中镜头与显示器之间的当前间距;基于所述当前间距并查询所预置的映射关系表,确定与所述当前间距所对应的当前近视度数,其中,所述映射关系表记载所述镜头与所述显示器之间的间距和近视度数的映射关系;将所述当前近视度数在所述显示器上进行显示。通过上述技术方案,基于镜头和显示器的距离信息所确定的近视度数信息用以辅助用户调节焦距,使得用户无需根据所看到的模糊画面来反复调节齿轮组,直到画面清晰为止,减少用户调节VR