
码垛货运机器人及码垛方法.pdf

一条****淑淑

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
码垛货运机器人及码垛方法.pdf
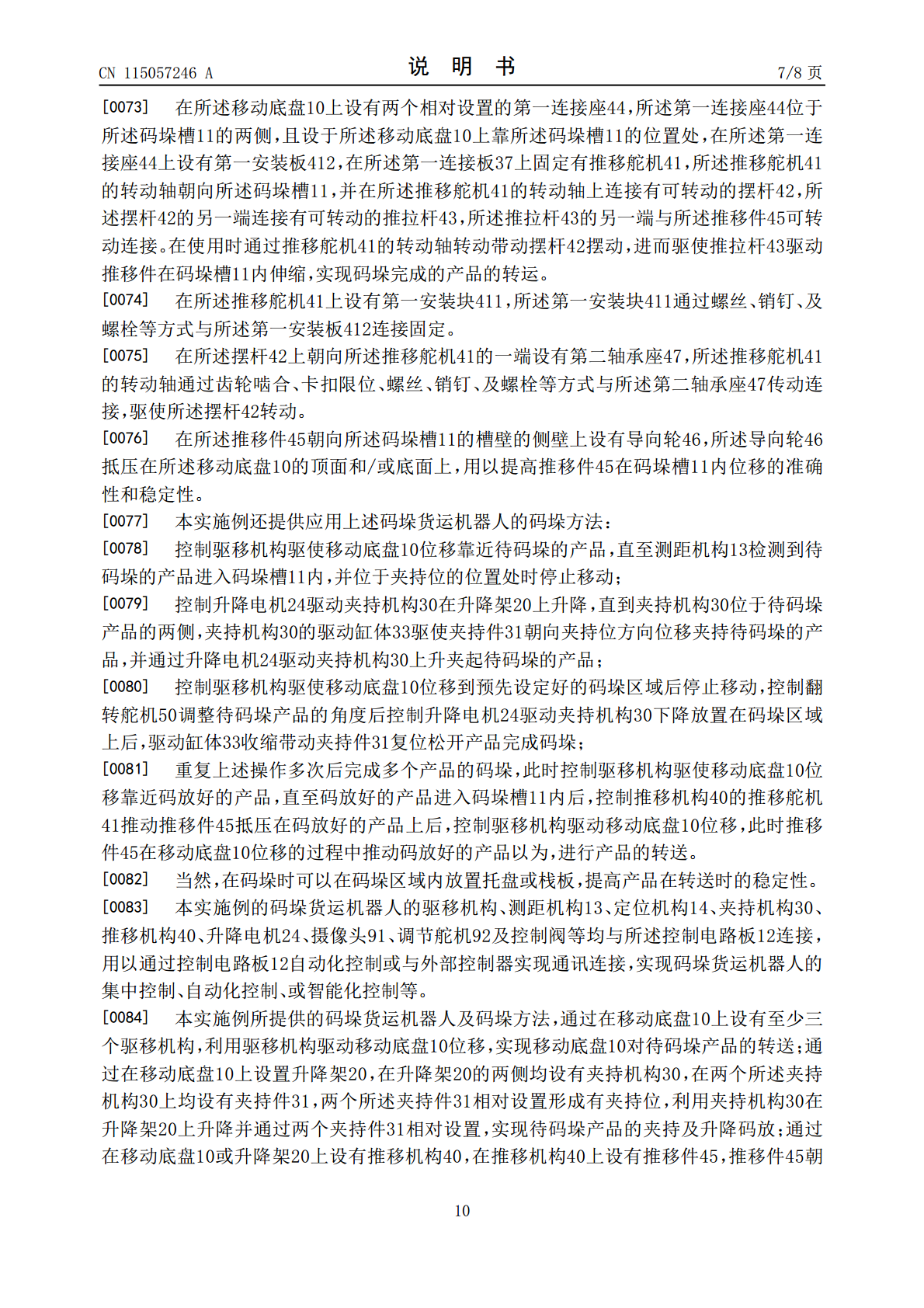
本发明公开了一种码垛货运机器人,包括移动底盘,在所述移动底盘上至少设有三个驱移机构,所述驱移机构支撑所述移动底盘;在所述移动底盘上设有升降架,在所述升降架的两侧均设有夹持机构,在两个所述夹持机构上均设有夹持件,两个所述夹持件相对设置形成有夹持位;在所述移动底盘或升降架上设有推移机构,在所述推移机构上设有推移件,所述推移件朝向所述夹持位。本发明能够实现在码垛产品后通过码垛机器人对产品进行移送的目的,降低产品码垛的成本投入,提高码垛产品的移送便捷性。
一种码垛机器人的控制方法及码垛机器人.pdf
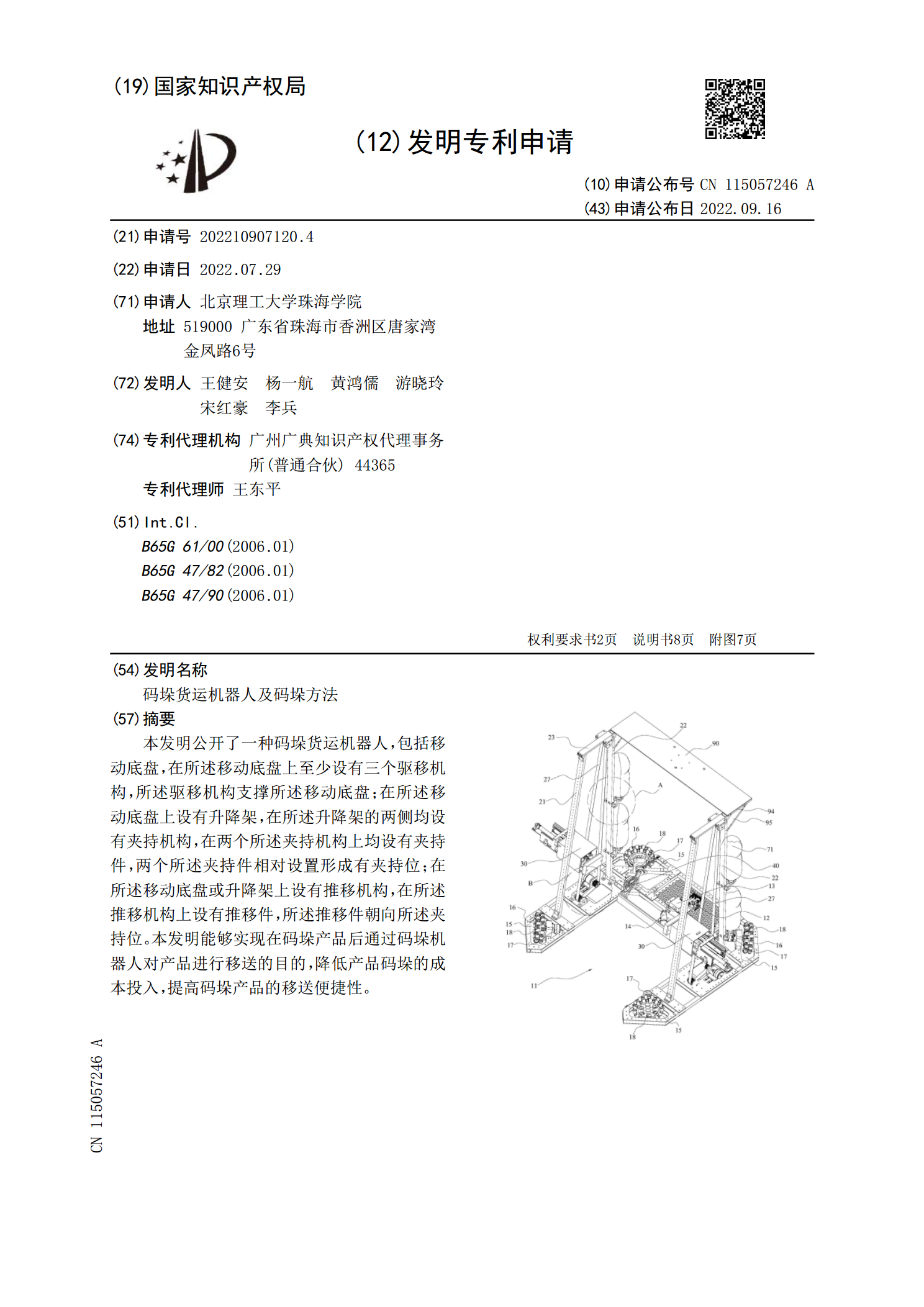
本发明公开一种码垛机器人的控制方法及码垛机器人,控制方法包括:确定托盘的尺寸和需要码垛的层数;步骤S1:基于物料每个表面的面积,判断托盘能否容纳物料,若能执行步骤S2,若否执行步骤ST;步骤S2:基于需要码垛的层数,按照预定规则将物料放置在托盘上,之后执行步骤S3;步骤S3:基于物料每个表面的面积,判断托盘剩余的空间能否容纳物料,若能,执行步骤S4,若否执行步骤ST;步骤S4:基于需要码垛的层数,按照预定规则将物料放置在托盘的剩余空间,之后执行步骤S5;步骤S5;重复步骤S3和步骤S4,直至托盘的剩余空间

一种物料码垛控制机器人及码垛方法.pdf
本发明公开一种物料码垛控制机器人及码垛方法,涉及码垛机器人相关技术领域,包括支杆和滑行轨道,支杆的底端固定有设备舱,支杆的顶端与滑行轨道滑动连接,支杆的顶端为T字型结构,支杆T字型结构的端部通过行进齿轮与滑行轨道连接,设备舱的内部滑动安装有力杆,力杆的底端通过定向槽滑动安装有伸缩杆,伸缩杆的底端固定有夹板,夹板的侧面通过活动孔插接有活动杆,设备舱的内部通过升降机构与力杆连接,升降机构内部的动力电机以及为行进齿轮提供动力的电机的输入端均通过导线连接有逻辑控制器,杆与力杆所在方向于竖直方向齐平。通过以上各装置
码垛装置及码垛方法.pdf
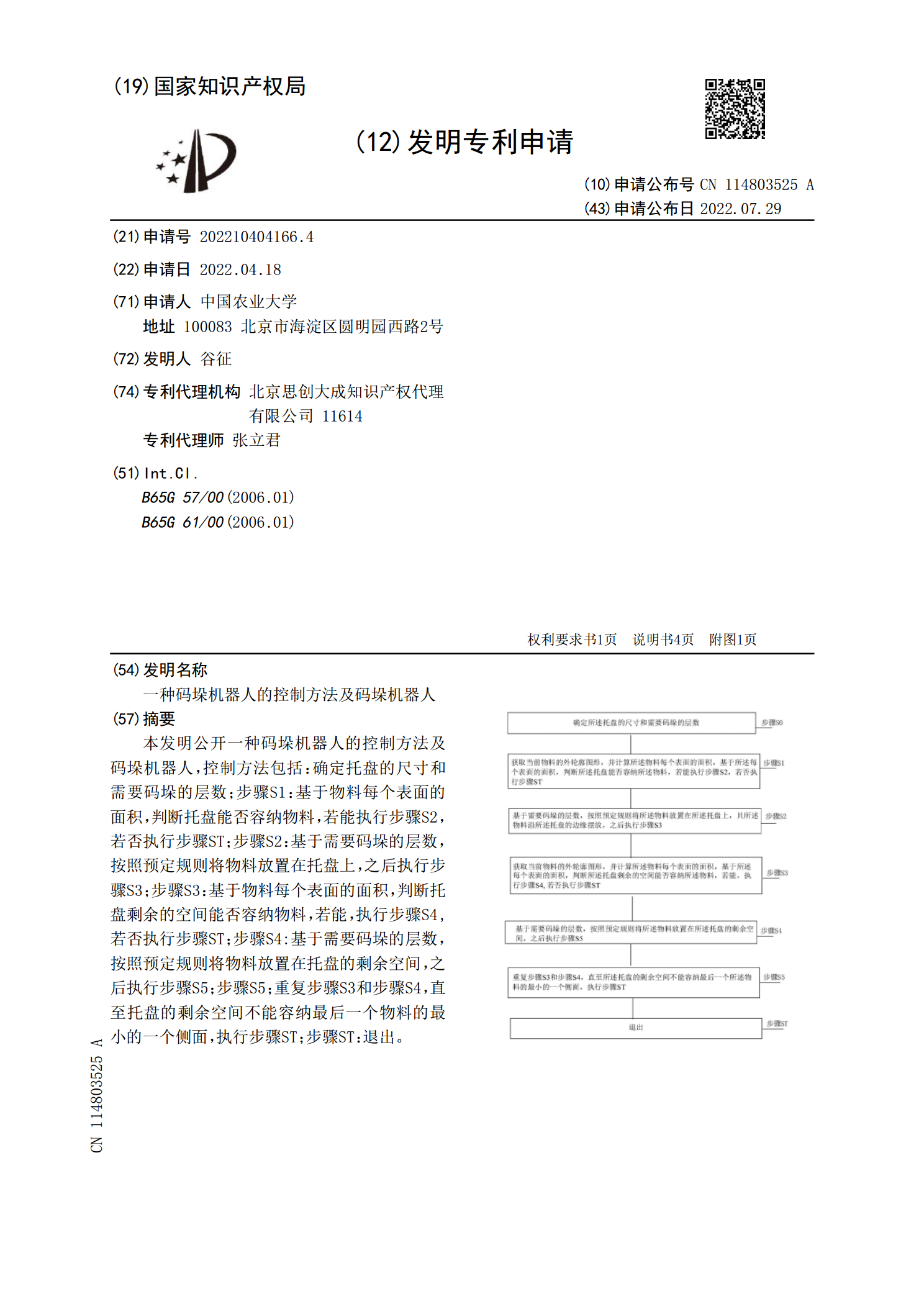
本发明涉及物料堆垛设备技术领域,具体涉及一种能够对尺寸不同的物品进行码垛的码垛装置及码垛方法。其中,码垛装置包括:输送线;竖直叠放结构,其具有入口,该入口与输送线相连通;其中,竖直叠放结构设有用于检测待码垛物的高度检测器和竖直方向放置的支撑架,入口设置在支撑架的顶部;其中,支撑架处设置有沿竖直方向回转的回转构件和设置在该回转构件处的码垛构件,码垛构件与回转构件固定连接;承载结构,其设置在竖直叠放结构的底部;控制系统,其与高度检测器连接,并根据该高度检测器检测到的待码垛物的高度控制回转构件转动,并带动码垛构

智能码垛机及其码垛方法.pdf
本发明公开了智能码垛机及其码垛方法,码垛机主要分为传输架和码垛架两部分,传输架设置传送带及其上的引导杆、摆动手和隔离杆,码垛架上设置传送带、xz轴位移机构和托架停留区,xz轴位移机构依靠磁吸盘抓取工件,并通过计算坐标,从而将工件有传送带转运至托架上。本发明采用上述码垛机和码垛方法,码垛过程实现了机器化与自动化,提高了码垛效率以及安全性。