
一种双电机驱动的电动转向装置及其控制方法.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双电机驱动的电动转向装置及其控制方法.pdf
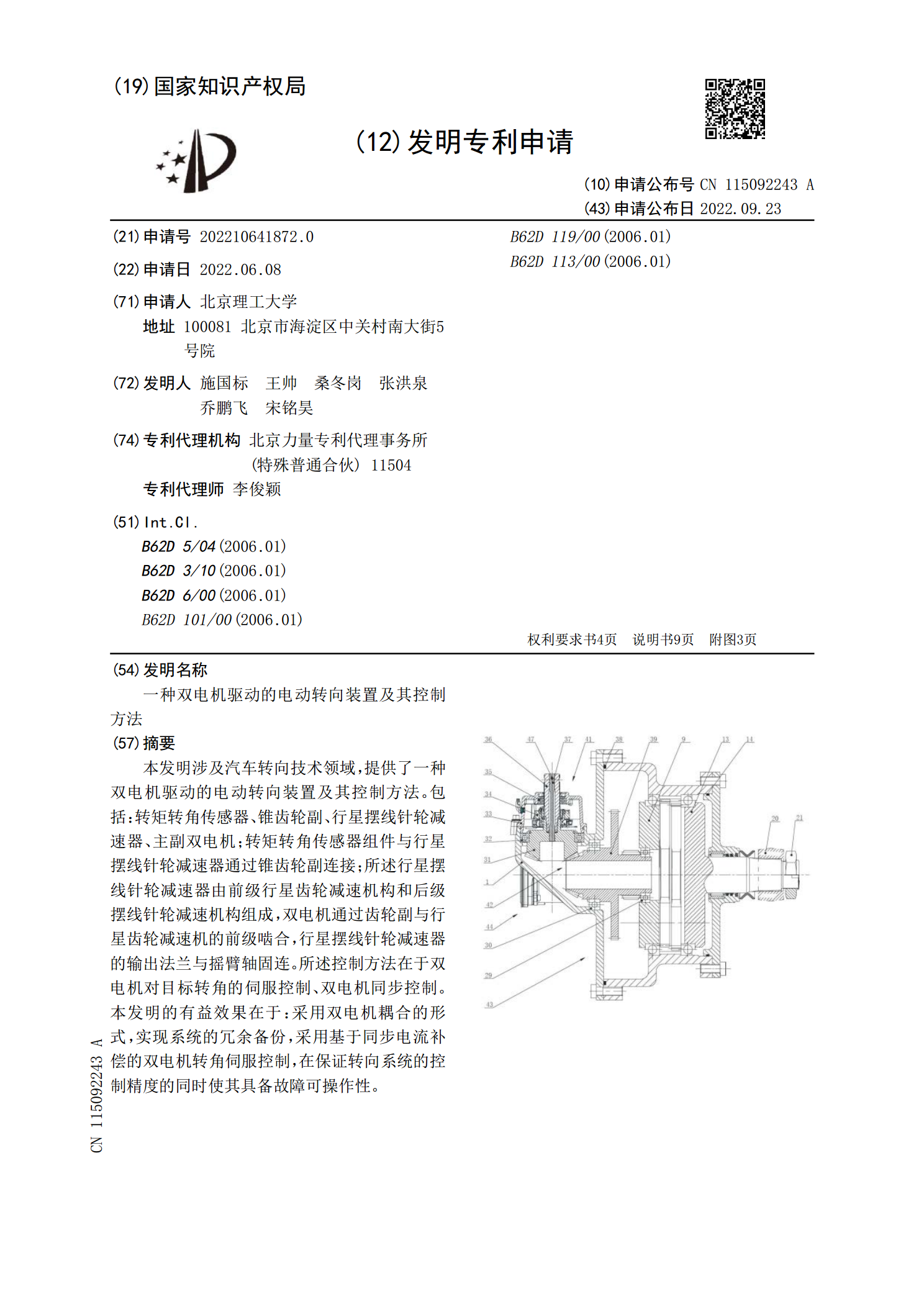
本发明涉及汽车转向技术领域,提供了一种双电机驱动的电动转向装置及其控制方法。包括:转矩转角传感器、锥齿轮副、行星摆线针轮减速器、主副双电机;转矩转角传感器组件与行星摆线针轮减速器通过锥齿轮副连接;所述行星摆线针轮减速器由前级行星齿轮减速机构和后级摆线针轮减速机构组成,双电机通过齿轮副与行星齿轮减速机的前级啮合,行星摆线针轮减速器的输出法兰与摇臂轴固连。所述控制方法在于双电机对目标转角的伺服控制、双电机同步控制。本发明的有益效果在于:采用双电机耦合的形式,实现系统的冗余备份,采用基于同步电流补偿的双电机转角

一种双电机耦合电动助力转向装置及其控制方法.pdf
本发明提供一种双电机耦合电动助力转向装置及其控制方法。采用磁粉离合器和同步器实现模式切换,由单排行星齿轮系统作为一号电机和二号电机的动力耦合装置。一号离合器和二号离合器分别限制一号电机和二号电机的力矩输出,同步器改变二号电机的能量流动方向。根据ECU对离合器的电流通断的控制,决定电机的动力输出;利用接合套的接合情况结合离合器的闭合,决定耦合情况;转向助力模块ECU依据电机故障及驱动电路自诊断技术,判断电机的状态,通过对离合器和接合套的控制,实现双电机容错控制。可以实现两电机单独驱动、双电机转速耦合驱动、双

电动液压助力转向油泵双电机驱动装置.pdf
本发明为一种电动液压助力转向油泵双电机驱动装置。主驱动电机(直流无刷电机)直接驱动油泵转动,辅驱动电机(直流有刷电机)适时工作,双电机的转速和转矩等工作状态根据电子控制单元ECU采集转向盘转速、车速及两电机的电流等信号而调整,两者通过同步带及带轮借助单向离合器实现动力的耦合。双电机、动力传递与耦合机构、转向油泵及转向控制器采用整体式结构,实现双电机电动油泵的集成设计。本发明双电机分布式的控制方案,提高了系统控制的自由度;低速转向轻便,高速路感好;电机只在需要助力时才高速工作,不转向时低速运转,系统能耗低;
一种电动车双电机驱动控制装置及方法.pdf
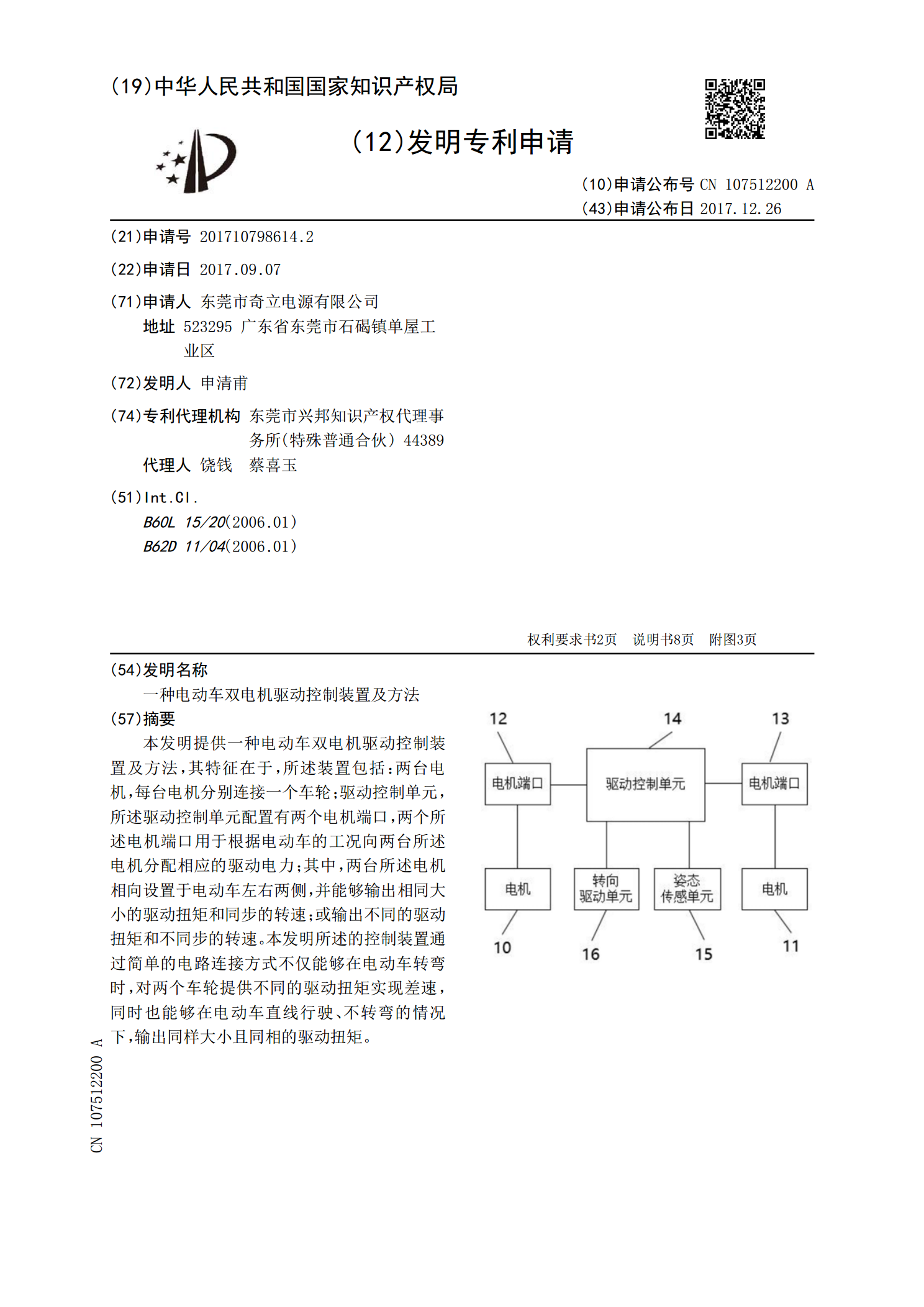
本发明提供一种电动车双电机驱动控制装置及方法,其特征在于,所述装置包括:两台电机,每台电机分别连接一个车轮;驱动控制单元,所述驱动控制单元配置有两个电机端口,两个所述电机端口用于根据电动车的工况向两台所述电机分配相应的驱动电力;其中,两台所述电机相向设置于电动车左右两侧,并能够输出相同大小的驱动扭矩和同步的转速;或输出不同的驱动扭矩和不同步的转速。本发明所述的控制装置通过简单的电路连接方式不仅能够在电动车转弯时,对两个车轮提供不同的驱动扭矩实现差速,同时也能够在电动车直线行驶、不转弯的情况下,输出同样大小
电动摩托车双电机驱动装置及其双电机驱动策略.pdf
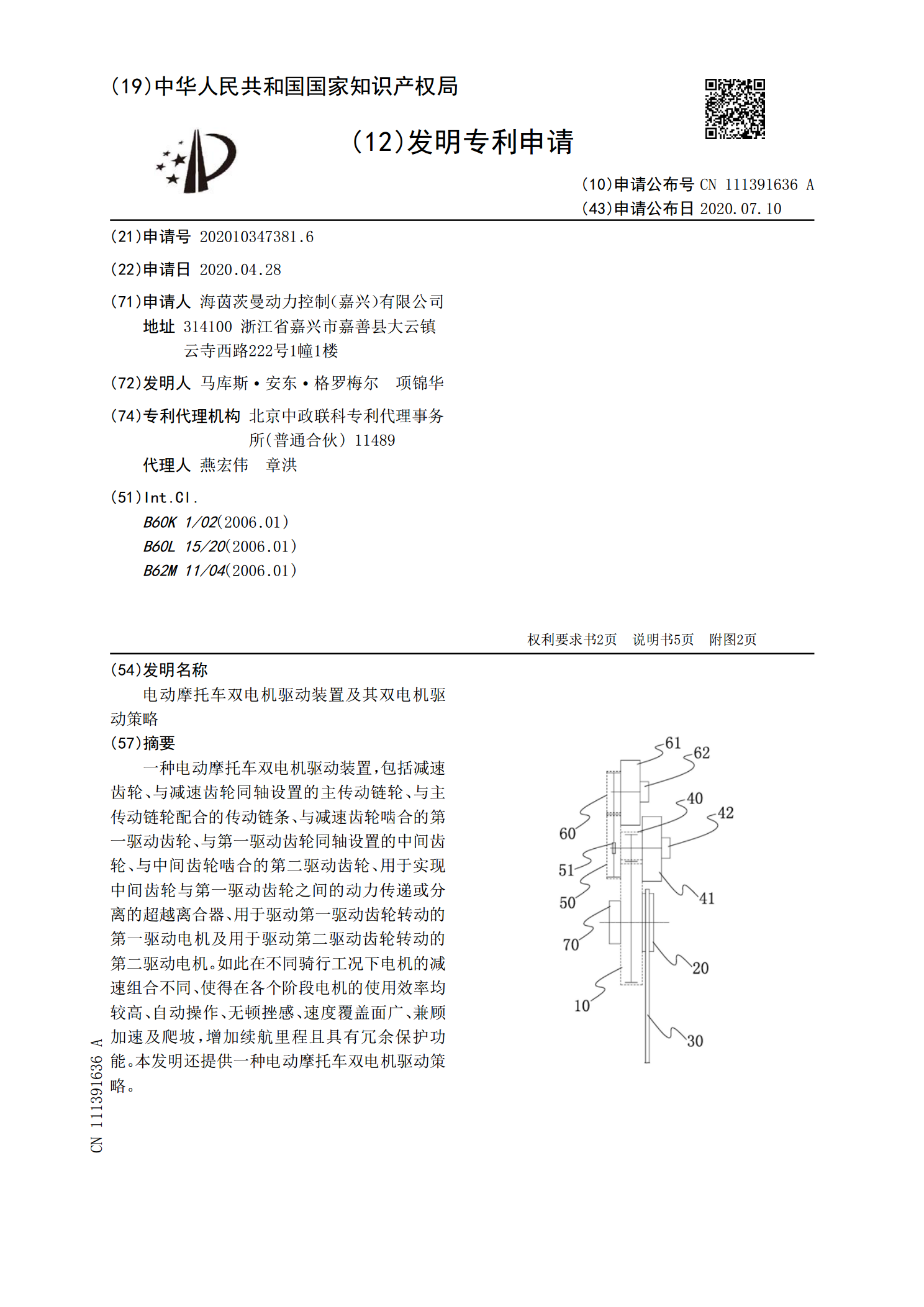
一种电动摩托车双电机驱动装置,包括减速齿轮、与减速齿轮同轴设置的主传动链轮、与主传动链轮配合的传动链条、与减速齿轮啮合的第一驱动齿轮、与第一驱动齿轮同轴设置的中间齿轮、与中间齿轮啮合的第二驱动齿轮、用于实现中间齿轮与第一驱动齿轮之间的动力传递或分离的超越离合器、用于驱动第一驱动齿轮转动的第一驱动电机及用于驱动第二驱动齿轮转动的第二驱动电机。如此在不同骑行工况下电机的减速组合不同、使得在各个阶段电机的使用效率均较高、自动操作、无顿挫感、速度覆盖面广、兼顾加速及爬坡,增加续航里程且具有冗余保护功能。本发明还提