
车辆感知系统的评估方法、装置、车辆及存储介质.pdf

秀美****甜v


1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆感知系统的评估方法、装置、车辆及存储介质.pdf
本申请涉及自动驾驶技术领域,特别涉及一种车辆感知系统的评估方法、装置、车辆及存储介质,其中,方法包括:获取车辆的源图像;基于预先训练的对抗样本生成网络,添加目标扰动至源图像,得到第一对抗样本,其中,预先训练的对抗样本生成网络由生成对抗网络GAN训练得到;将第一对抗样本输入至车辆的感知系统的多个检测子系统,并根据多个检测子系统检测的多个感知结果得到感知系统的评估结果,由此,通过利用对抗样本攻击的方法,解决了感知系统受到自身潜在漏洞和外界特殊因素的影响,可能无法对交通要素进行正确识别的问题,可以对自动驾驶感知
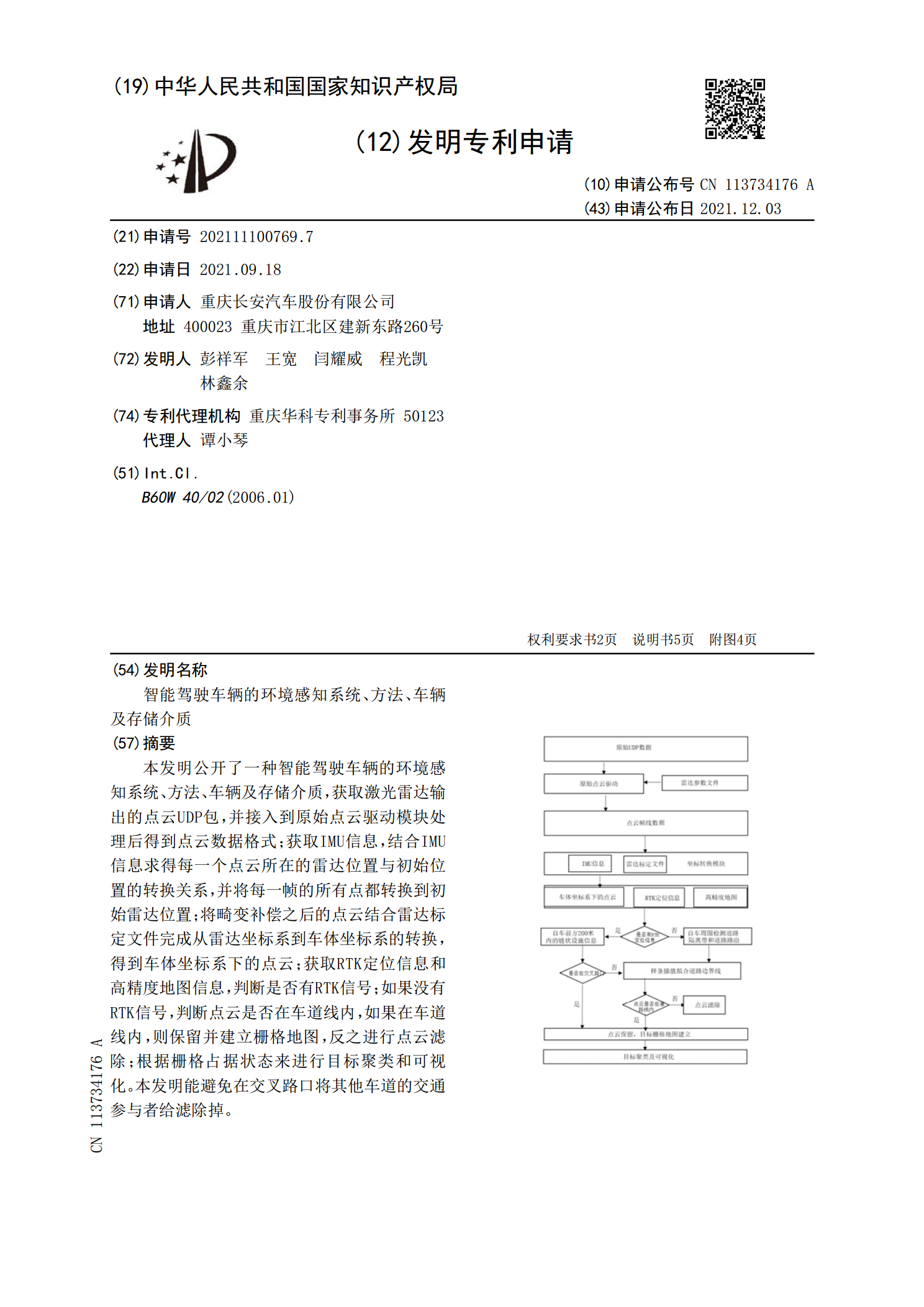
智能驾驶车辆的环境感知系统、方法、车辆及存储介质.pdf
本发明公开了一种智能驾驶车辆的环境感知系统、方法、车辆及存储介质,获取激光雷达输出的点云UDP包,并接入到原始点云驱动模块处理后得到点云数据格式;获取IMU信息,结合IMU信息求得每一个点云所在的雷达位置与初始位置的转换关系,并将每一帧的所有点都转换到初始雷达位置;将畸变补偿之后的点云结合雷达标定文件完成从雷达坐标系到车体坐标系的转换,得到车体坐标系下的点云;获取RTK定位信息和高精度地图信息,判断是否有RTK信号;如果没有RTK信号,判断点云是否在车道线内,如果在车道线内,则保留并建立栅格地图,反之进行
车辆的盲区辅助系统评价方法、装置、车辆及存储介质.pdf
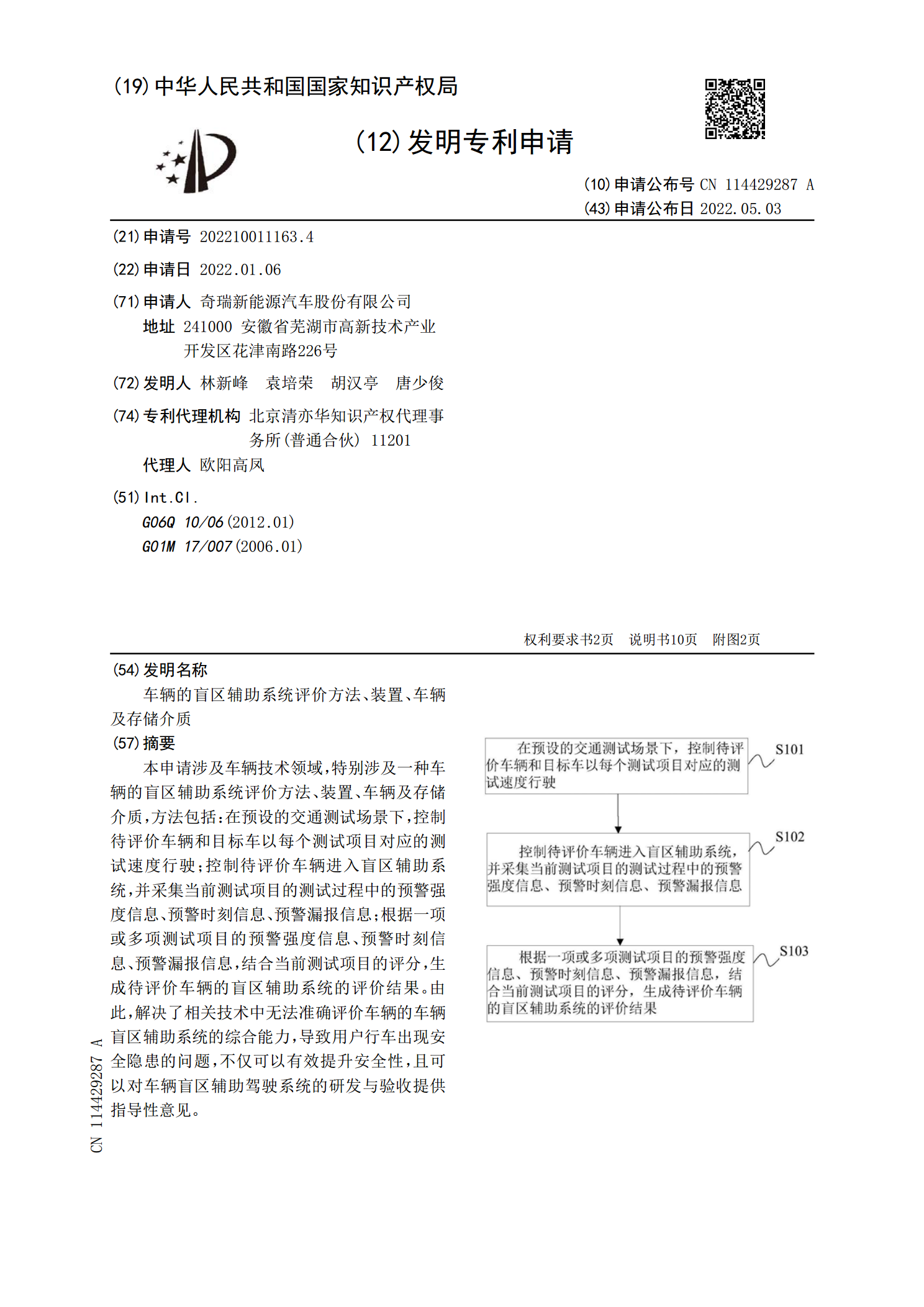
本申请涉及车辆技术领域,特别涉及一种车辆的盲区辅助系统评价方法、装置、车辆及存储介质,方法包括:在预设的交通测试场景下,控制待评价车辆和目标车以每个测试项目对应的测试速度行驶;控制待评价车辆进入盲区辅助系统,并采集当前测试项目的测试过程中的预警强度信息、预警时刻信息、预警漏报信息;根据一项或多项测试项目的预警强度信息、预警时刻信息、预警漏报信息,结合当前测试项目的评分,生成待评价车辆的盲区辅助系统的评价结果。由此,解决了相关技术中无法准确评价车辆的车辆盲区辅助系统的综合能力,导致用户行车出现安全隐患的问题

车辆控制装置、车辆控制系统、车辆控制方法及存储介质.pdf
本发明涉及车辆控制装置、车辆控制系统、车辆控制方法以及存储介质。若被进行关门指示,则CPU取得由比对ECU对第1接收范围的车厢外比对的判定结果,在第1接收范围的车厢外比对的判定结果正常的情况下,取得第2接收范围的车厢外比对的判定结果,在第2接收范围的车厢外比对的判定结果正常的情况下,取得第2接收范围的车厢外比对的判定结果,在第2接收范围的车厢外比对的判定结果变为异常的情况下,开始门关闭动作。
车辆控制方法、装置、车辆及存储介质.pdf
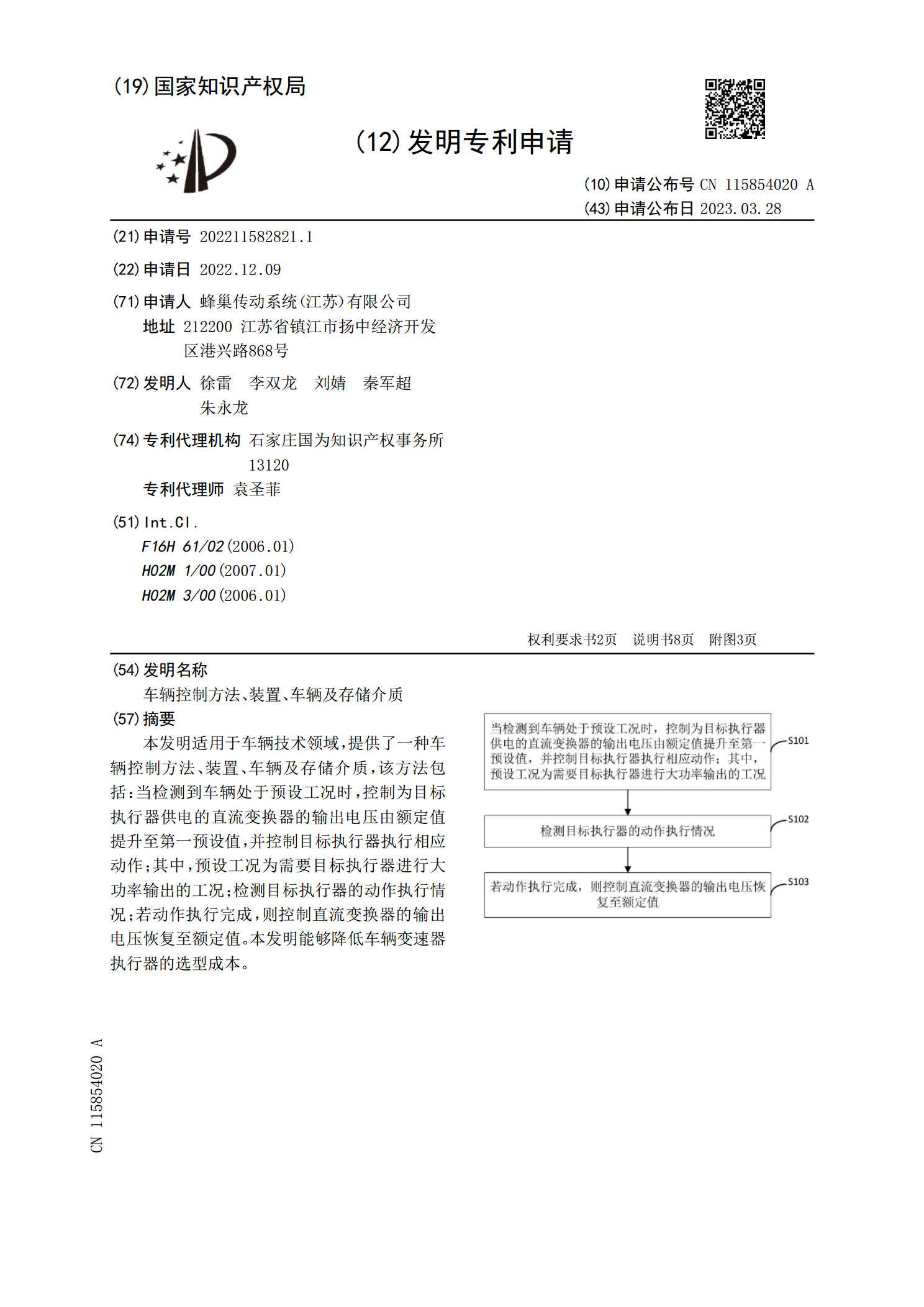
本发明适用于车辆技术领域,提供了一种车辆控制方法、装置、车辆及存储介质,该方法包括:当检测到车辆处于预设工况时,控制为目标执行器供电的直流变换器的输出电压由额定值提升至第一预设值,并控制目标执行器执行相应动作;其中,预设工况为需要目标执行器进行大功率输出的工况;检测目标执行器的动作执行情况;若动作执行完成,则控制直流变换器的输出电压恢复至额定值。本发明能够降低车辆变速器执行器的选型成本。