
一种基于势场力的车辆主动避障控制方法及系统.pdf

玉环****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于势场力的车辆主动避障控制方法及系统.pdf
本发明公开了一种基于势场力的车辆主动避障控制方法及系统,包括:当障碍车辆驶入主车辆所在车道的前方区域且主车辆陷入局部极小值点时,实时获取主车辆对应的第一坐标信息和障碍车辆对应的第二坐标信息;按照预设的势场力预测算法,结合第一坐标信息和第二坐标信息,计算得到主车辆对应的第一势场力,并利用第一势场力,控制主车辆行驶至虚拟目标点;其中,第一坐标信息为主车辆的中心点的坐标信息,第二坐标信息为障碍车辆的中心点的坐标信息。本发明基于主车辆的坐标信息和驶入主车辆所在车道前方区域的障碍车辆的坐标信息,计算得到用于控制主车

一种基于人工势场法的车辆编队避障控制方法.pdf
一种基于人工势场法的车辆编队避障控制方法,首先建立本车的运动学模型,根据道路环境和车辆跟驰情况构建道路势场和车辆避撞势场;然后将道路抽象为轨迹,对该轨迹进行跟踪,利用反步法设计车辆跟踪控制器;并设计势能控制器规范车辆行进、避免车辆相撞与撞到障碍,该控制器为切换控制器,在人工势场仅在触发条件满足的情况下发挥作用。本发明能够保证车辆队列快速高效、顺利通过障碍物,完成避障后较快恢复编队行驶。
一种基于人工势场法的车辆主动避撞方法.pdf
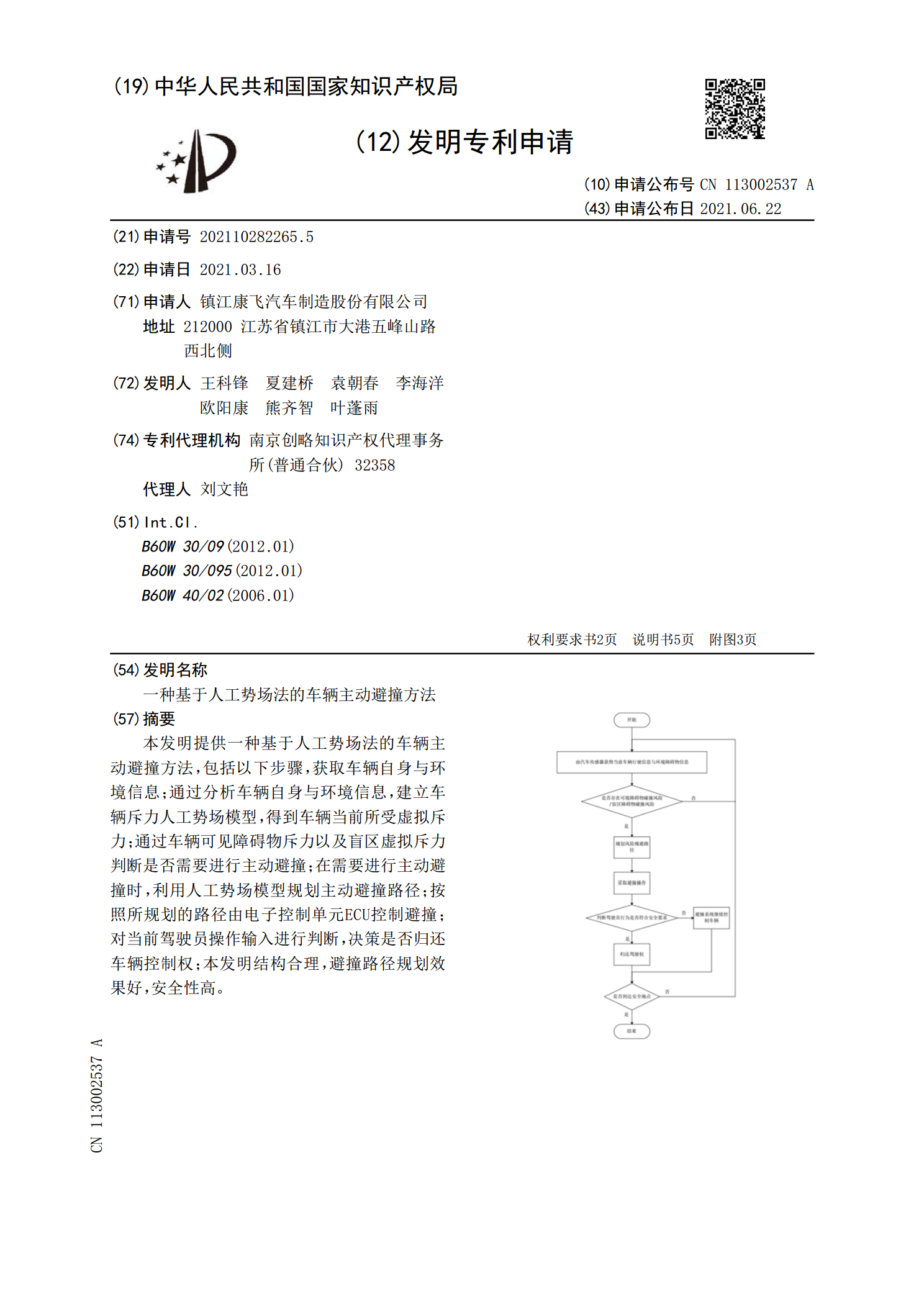
本发明提供一种基于人工势场法的车辆主动避撞方法,包括以下步骤,获取车辆自身与环境信息;通过分析车辆自身与环境信息,建立车辆斥力人工势场模型,得到车辆当前所受虚拟斥力;通过车辆可见障碍物斥力以及盲区虚拟斥力判断是否需要进行主动避撞;在需要进行主动避撞时,利用人工势场模型规划主动避撞路径;按照所规划的路径由电子控制单元ECU控制避撞;对当前驾驶员操作输入进行判断,决策是否归还车辆控制权;本发明结构合理,避撞路径规划效果好,安全性高。
一种基于人工势场法的AGV动态避障方法.pdf
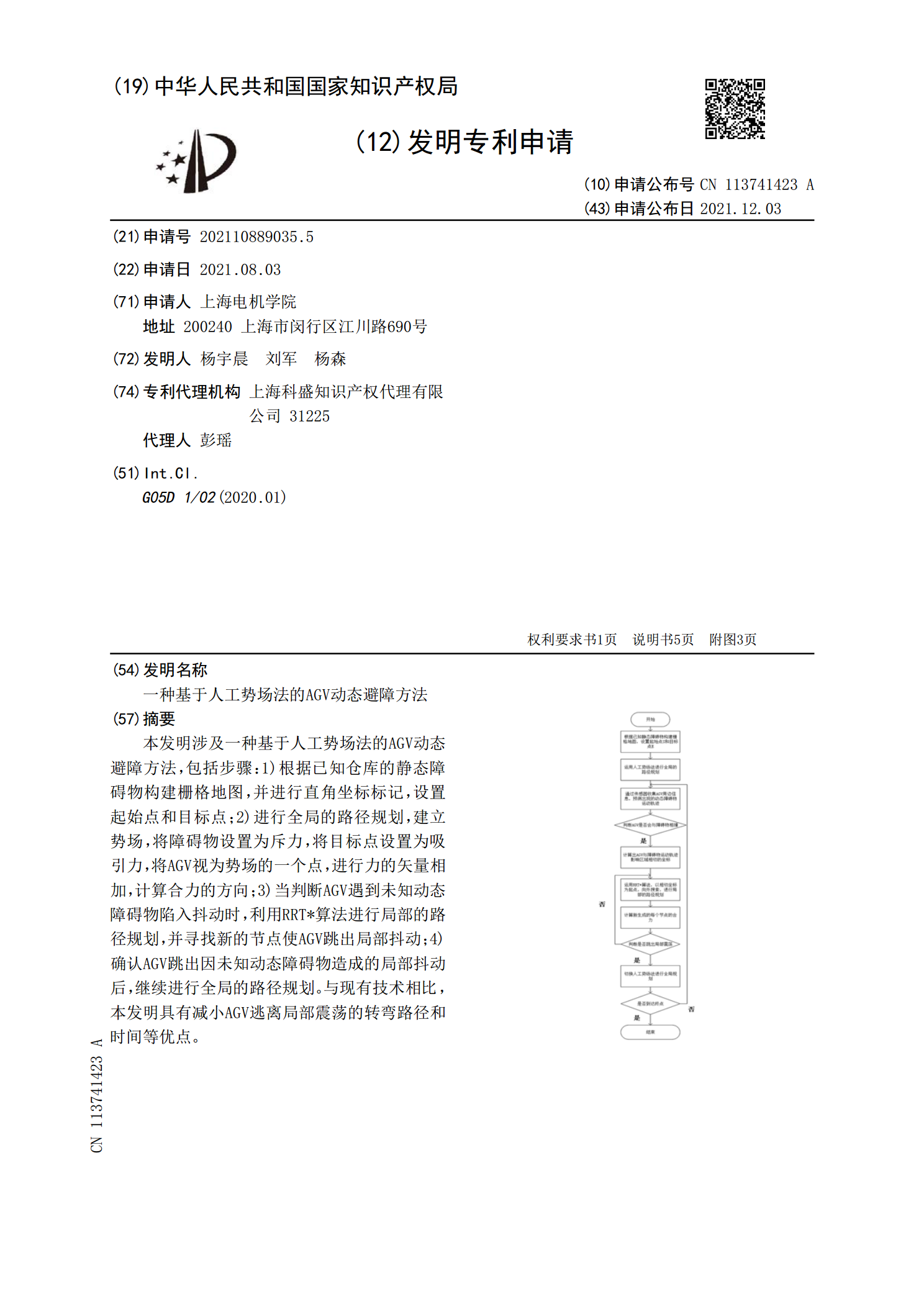
本发明涉及一种基于人工势场法的AGV动态避障方法,包括步骤:1)根据已知仓库的静态障碍物构建栅格地图,并进行直角坐标标记,设置起始点和目标点;2)进行全局的路径规划,建立势场,将障碍物设置为斥力,将目标点设置为吸引力,将AGV视为势场的一个点,进行力的矢量相加,计算合力的方向;3)当判断AGV遇到未知动态障碍物陷入抖动时,利用RRT*算法进行局部的路径规划,并寻找新的节点使AGV跳出局部抖动;4)确认AGV跳出因未知动态障碍物造成的局部抖动后,继续进行全局的路径规划。与现有技术相比,本发明具有减小AGV逃

一种基于人工势场多AUV集群的实时避障方法.docx
一种基于人工势场多AUV集群的实时避障方法论文题目:一种基于人工势场的多AUV集群实时避障方法摘要:多水下自主机器人(AUV)集群在海洋环境中的应用越来越受到关注,但是在实际应用中遇到的避障问题仍然是研究的热点和难点之一。为了解决多AUV集群实时避障的问题,本论文提出了一种基于人工势场的多AUV集群实时避障方法。通过对AUV及其周围环境建模,引入人工势场理论,给出了避障路径规划和控制的算法,从而实现了多AUV集群的实时避障。关键词:多AUV集群;人工势场;避障;路径规划;控制1引言多AUV集群在海洋勘测、