
一种基于人工势场多AUV集群的实时避障方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于人工势场多AUV集群的实时避障方法.docx
一种基于人工势场多AUV集群的实时避障方法论文题目:一种基于人工势场的多AUV集群实时避障方法摘要:多水下自主机器人(AUV)集群在海洋环境中的应用越来越受到关注,但是在实际应用中遇到的避障问题仍然是研究的热点和难点之一。为了解决多AUV集群实时避障的问题,本论文提出了一种基于人工势场的多AUV集群实时避障方法。通过对AUV及其周围环境建模,引入人工势场理论,给出了避障路径规划和控制的算法,从而实现了多AUV集群的实时避障。关键词:多AUV集群;人工势场;避障;路径规划;控制1引言多AUV集群在海洋勘测、

基于人工势场法的AUV避障算法研究综述.docx
基于人工势场法的AUV避障算法研究综述摘要:近年来,随着水下机器人的快速发展和广泛应用,水下环境中自主避障成为了研究的热点。基于人工势场法的AUV避障算法是一种常用且有效的方法。本文综述了基于人工势场法的AUV避障算法的研究进展和应用。首先介绍了人工势场法的原理和基本思想,然后分析了人工势场法在AUV避障中的应用场景。接着,综述了基于人工势场法的AUV避障算法的主要研究方法和技术,并对各种方法进行了比较和评价。最后,讨论了该算法的局限性和改进方向。关键词:AUV,避障算法,人工势场法,研究进展,应用引言水

基于人工势场法的多智能体编队避障方法.docx
基于人工势场法的多智能体编队避障方法基于人工势场法的多智能体编队避障方法摘要:多智能体编队在无人系统领域起着重要的作用,并且随着技术的发展,越来越多的无人系统被用于各种应用场景中。然而,多智能体编队中的避障问题一直是一个挑战。本论文提出了一种基于人工势场法的多智能体编队避障方法,通过引入人工势场的概念来实现智能体之间的避障和编队控制。通过仿真实验验证了该方法的有效性和鲁棒性。关键词:多智能体编队,避障,人工势场法,控制,仿真实验1.引言多智能体编队是指协调多个无人系统进行协同工作,从而实现一定的任务目标。
一种基于人工势场法的AGV动态避障方法.pdf
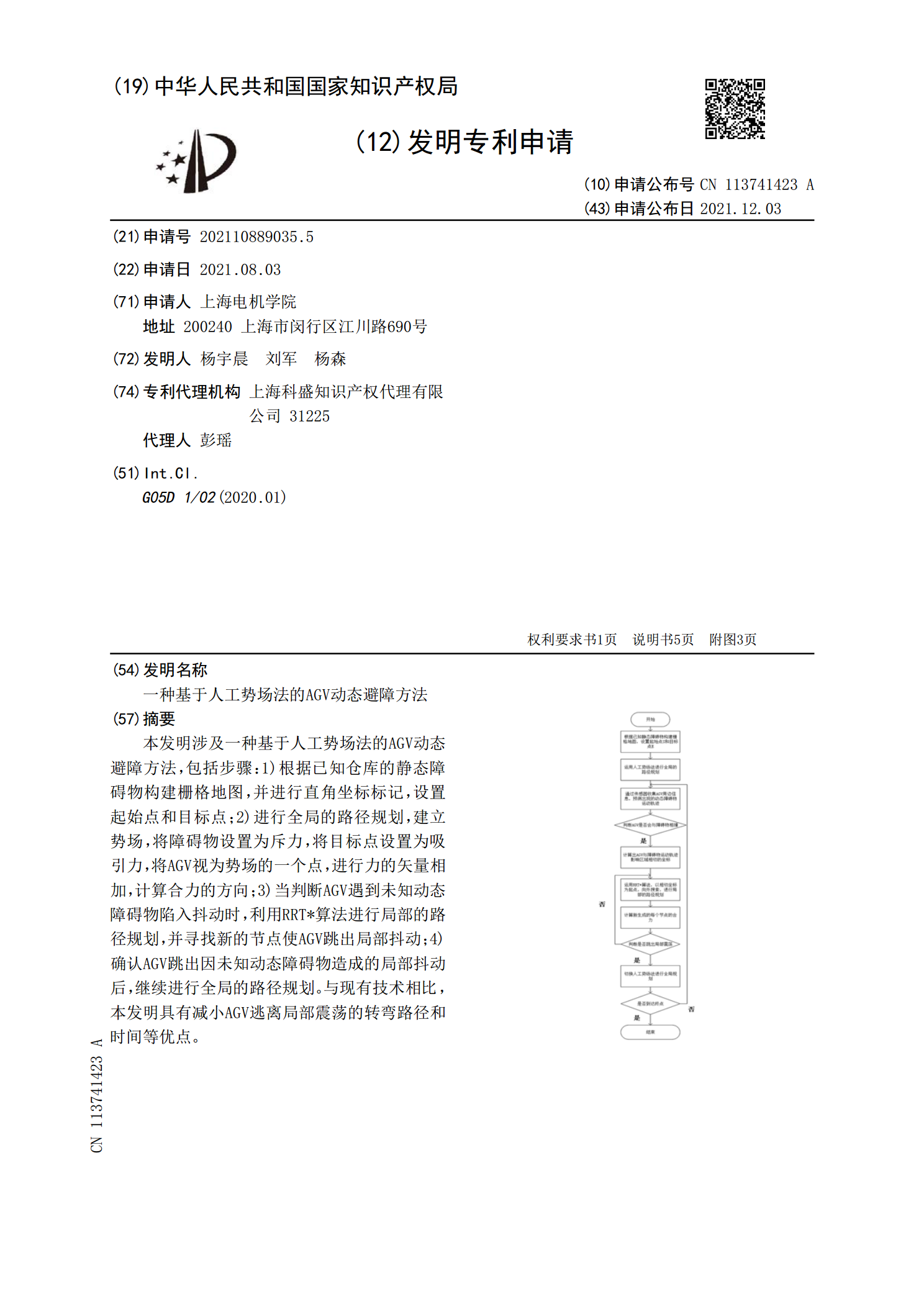
本发明涉及一种基于人工势场法的AGV动态避障方法,包括步骤:1)根据已知仓库的静态障碍物构建栅格地图,并进行直角坐标标记,设置起始点和目标点;2)进行全局的路径规划,建立势场,将障碍物设置为斥力,将目标点设置为吸引力,将AGV视为势场的一个点,进行力的矢量相加,计算合力的方向;3)当判断AGV遇到未知动态障碍物陷入抖动时,利用RRT*算法进行局部的路径规划,并寻找新的节点使AGV跳出局部抖动;4)确认AGV跳出因未知动态障碍物造成的局部抖动后,继续进行全局的路径规划。与现有技术相比,本发明具有减小AGV逃

基于模糊人工势场法的多智能体编队控制及避障方法.docx
基于模糊人工势场法的多智能体编队控制及避障方法基于模糊人工势场法的多智能体编队控制及避障方法摘要:多智能体编队控制及避障是无人系统领域的研究热点之一。针对多智能体编队控制和避障问题,本文提出了一种基于模糊人工势场法的控制方法。该方法通过引入模糊逻辑,将势场法与模糊控制相结合,实现多智能体之间的编队控制和避障功能。通过对模糊规则的设计和优化,使得编队过程中智能体之间的交互更加智能化和灵活化,能够适应不同的环境和任务需求。仿真结果表明,该方法在多智能体编队控制和避障方面具有较好的实用性和鲁棒性。关键词:多智能