
下肢辅助外骨骼机器人的传动方法.pdf

小代****回来


1/9

2/9

3/9
4/9

5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

下肢辅助外骨骼机器人的传动方法.pdf
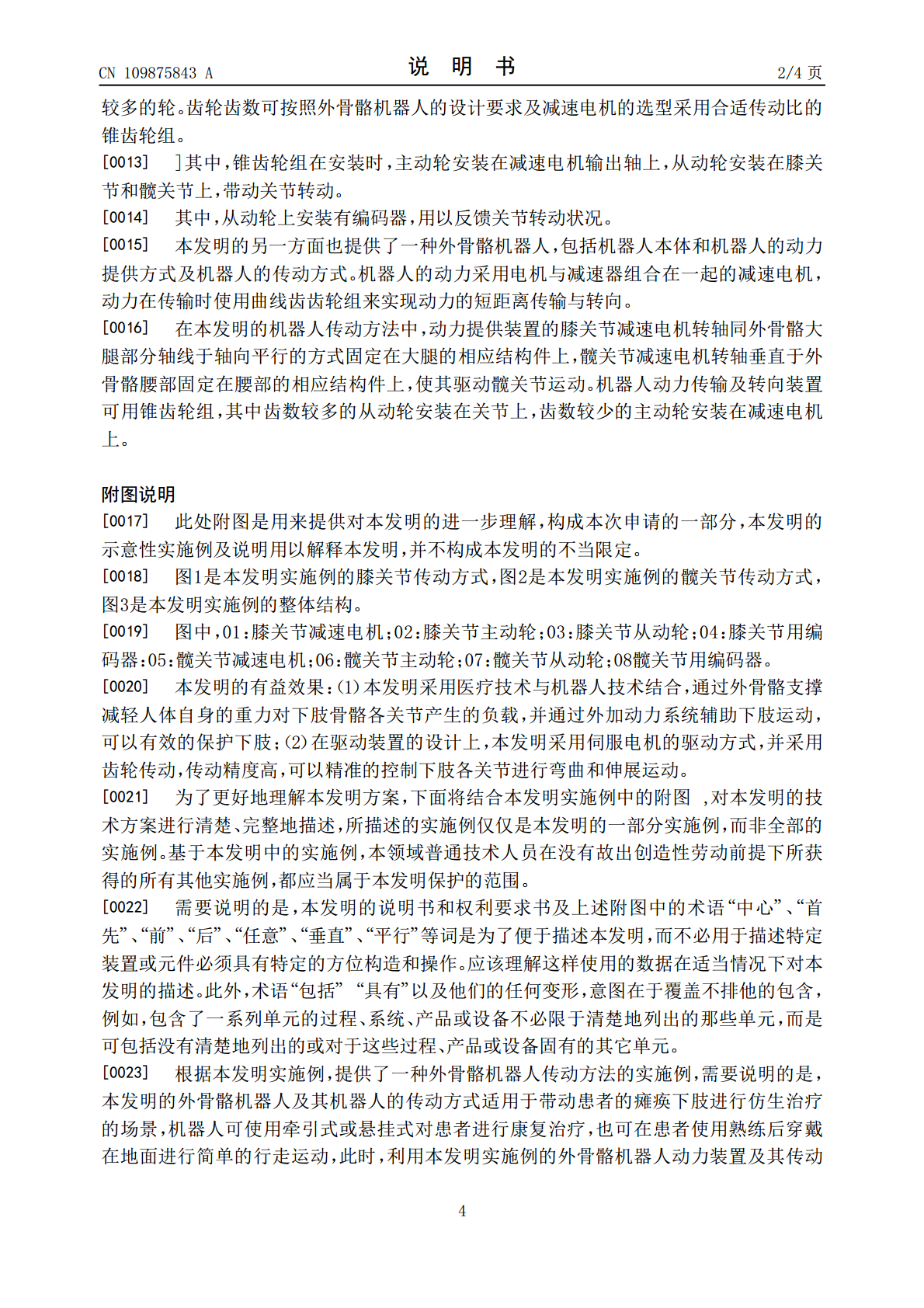
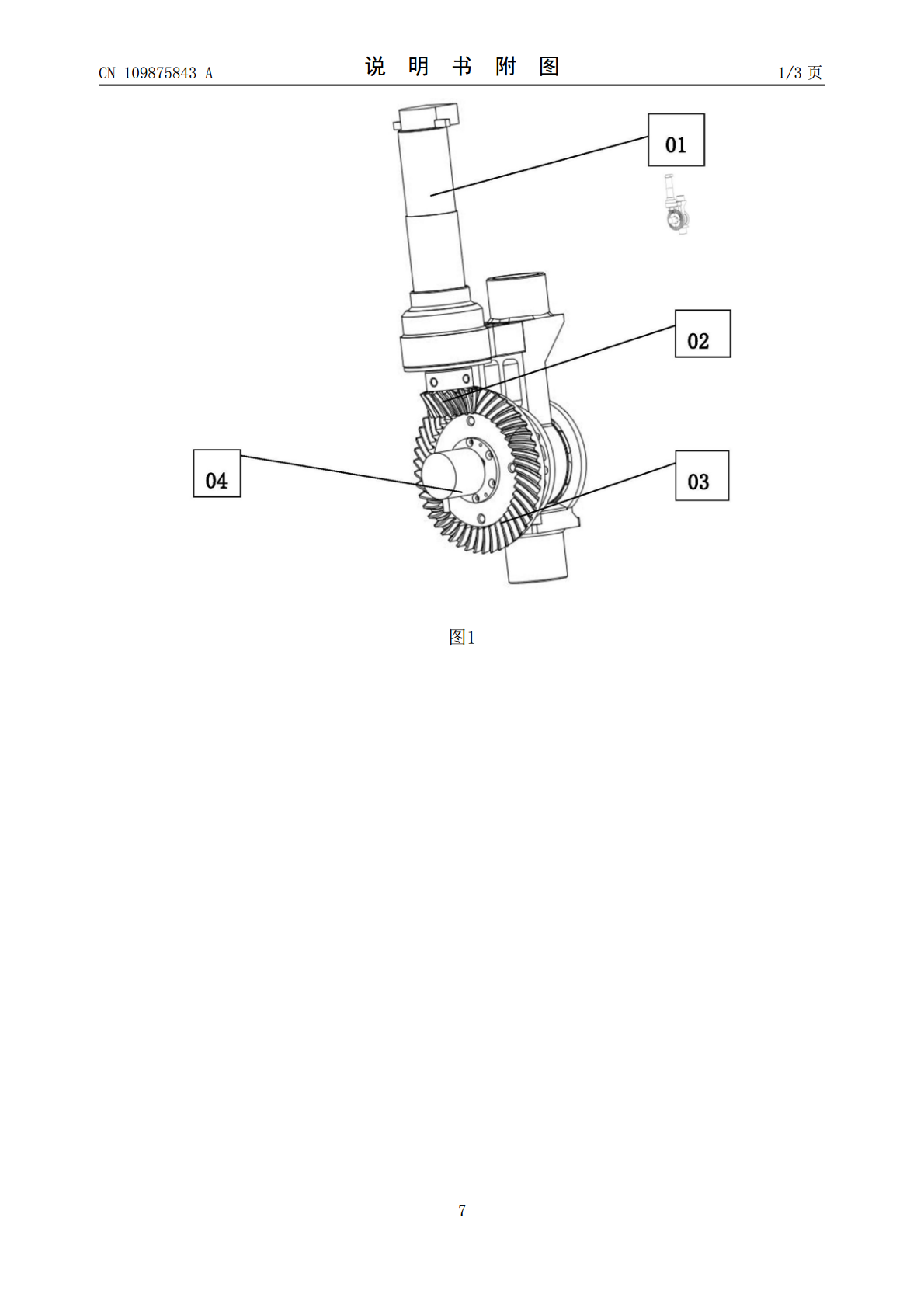
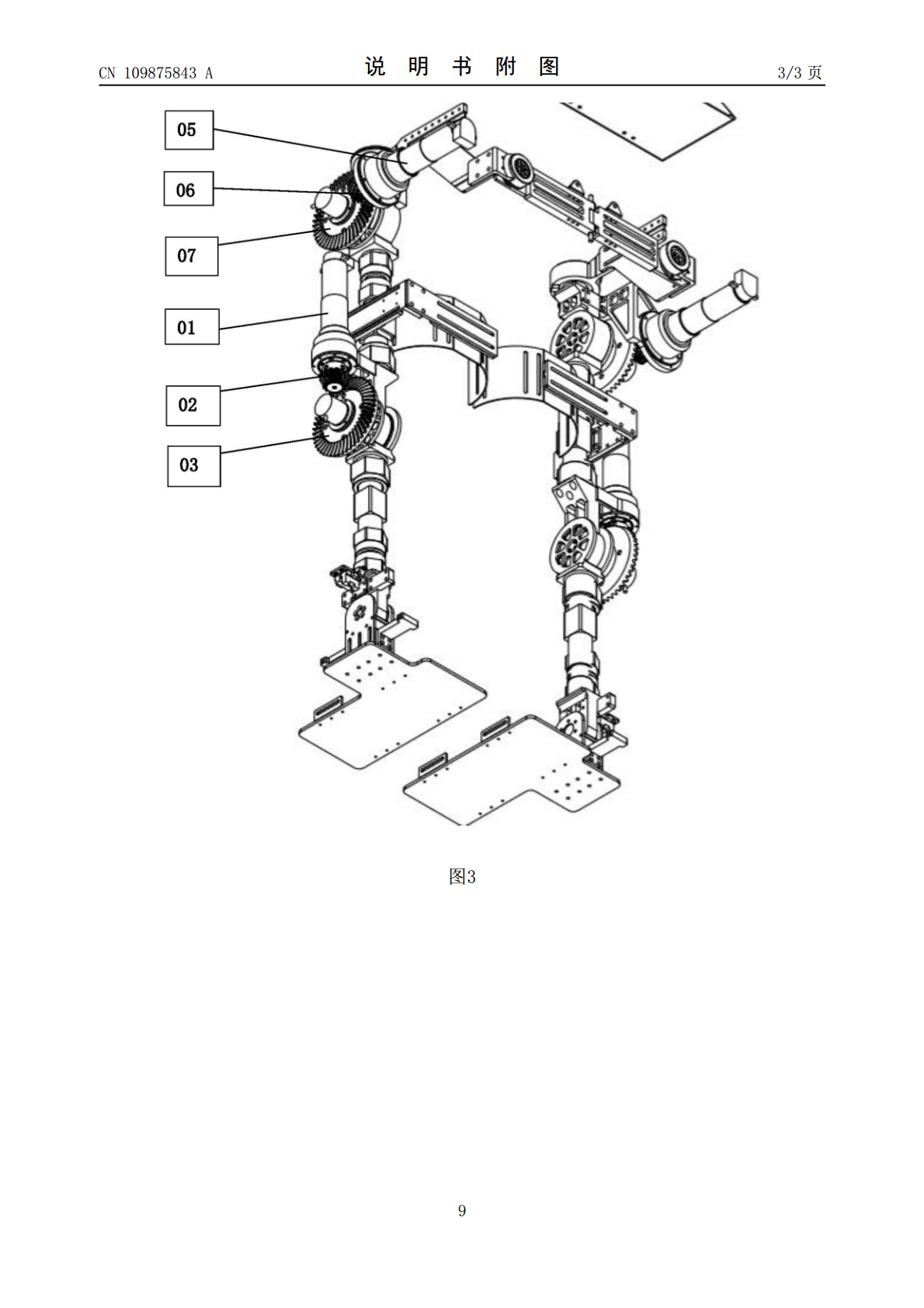
本发明公开了一种下肢辅助外骨骼机器人及其传动方法。其中,该机器人的传动方法主要由齿轮传动,使用齿轮传动中的曲线齿锥齿轮传动方式。该传动方式主要用于膝关节和髋关节的运动。在主控板的控制下由驱动器驱动电机做出相应转动,电机的转动再由一组曲线齿锥齿轮传动,驱动相关关节转动使机器运动。其中,外骨骼机器人所使用的锥齿轮组与电机连接的齿轮是小号的齿轮,小齿轮驱动大齿轮。
下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人.pdf
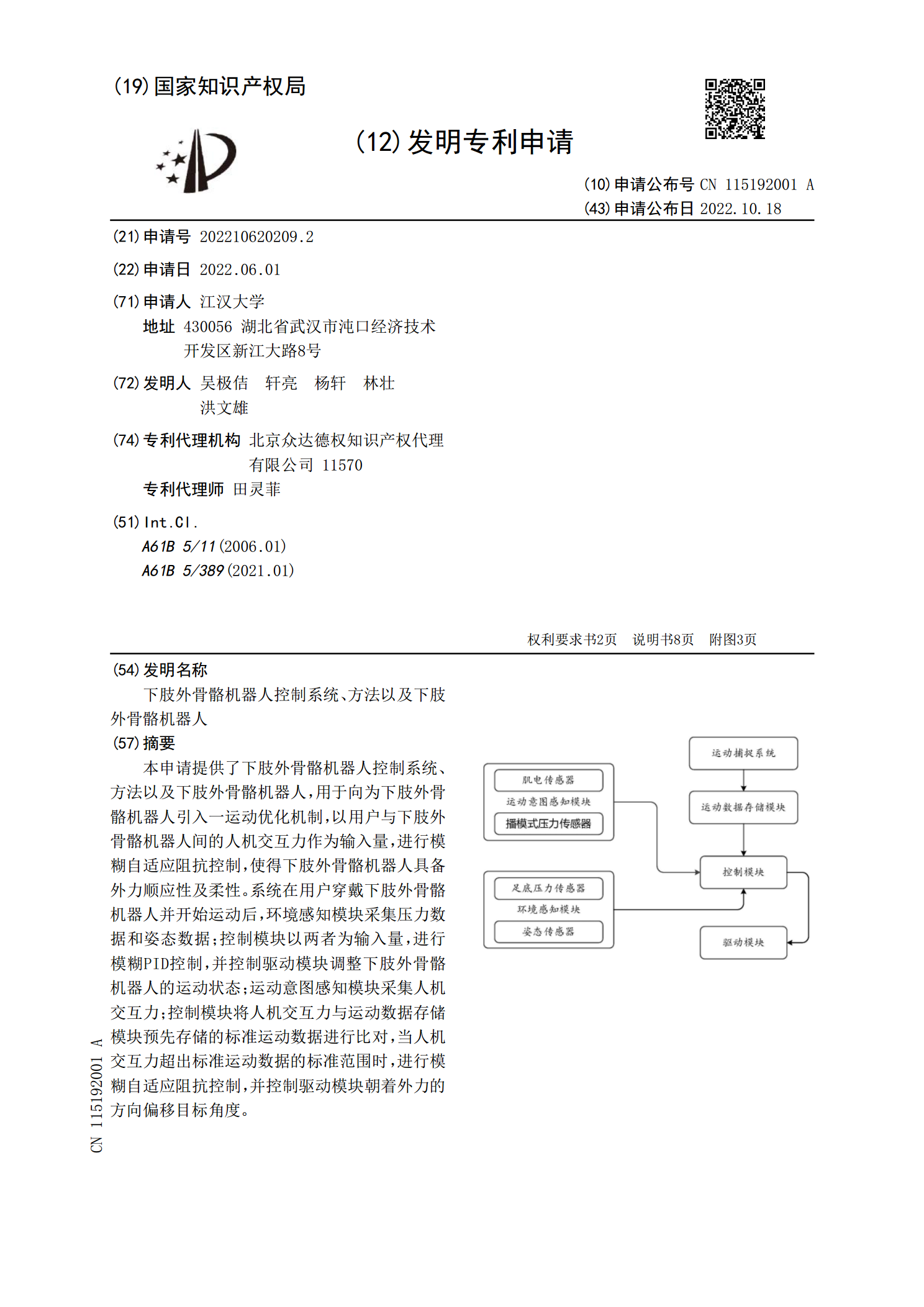
本申请提供了下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人,用于向为下肢外骨骼机器人引入一运动优化机制,以用户与下肢外骨骼机器人间的人机交互力作为输入量,进行模糊自适应阻抗控制,使得下肢外骨骼机器人具备外力顺应性及柔性。系统在用户穿戴下肢外骨骼机器人并开始运动后,环境感知模块采集压力数据和姿态数据;控制模块以两者为输入量,进行模糊PID控制,并控制驱动模块调整下肢外骨骼机器人的运动状态;运动意图感知模块采集人机交互力;控制模块将人机交互力与运动数据存储模块预先存储的标准运动数据进行比对,当人机交互力超
一种基于下肢外骨骼机器人的按需辅助控制方法.pdf
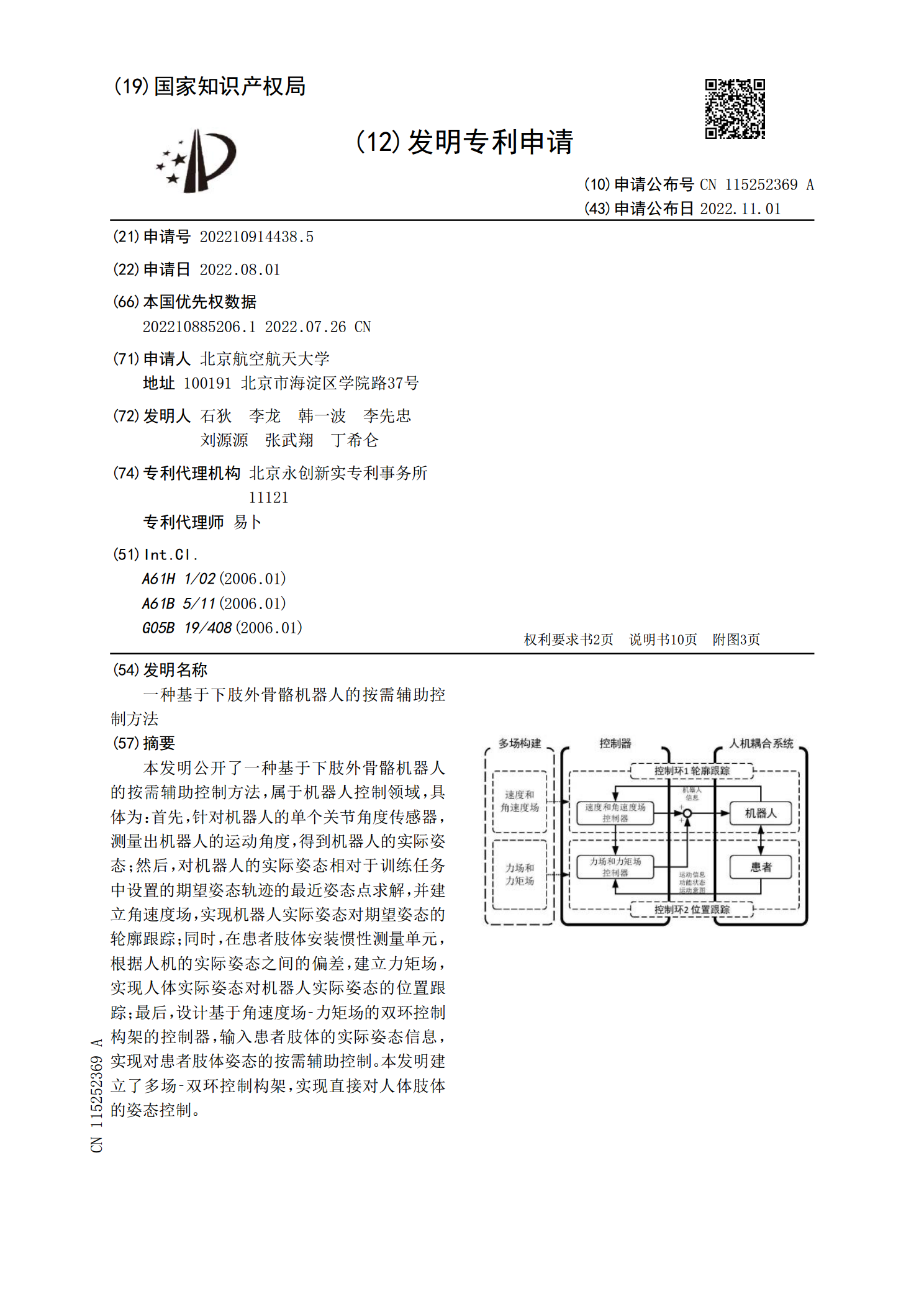
本发明公开了一种基于下肢外骨骼机器人的按需辅助控制方法,属于机器人控制领域,具体为:首先,针对机器人的单个关节角度传感器,测量出机器人的运动角度,得到机器人的实际姿态;然后,对机器人的实际姿态相对于训练任务中设置的期望姿态轨迹的最近姿态点求解,并建立角速度场,实现机器人实际姿态对期望姿态的轮廓跟踪;同时,在患者肢体安装惯性测量单元,根据人机的实际姿态之间的偏差,建立力矩场,实现人体实际姿态对机器人实际姿态的位置跟踪;最后,设计基于角速度场‑力矩场的双环控制构架的控制器,输入患者肢体的实际姿态信息,实现对患

下肢助行外骨骼机器人的控制方法及外骨骼机器人.pdf
本发明提供了一种下肢助行外骨骼机器人的控制方法及外骨骼机器人,其中,控制方法,包括:检测腿部关节的角度;检测外骨骼机器人和用户的整体的质心的位置;检测步行过程中足底的压力,包括右腿足底承受的第一压力F

下肢外骨骼机器人辅助行走控制研究的任务书.docx
下肢外骨骼机器人辅助行走控制研究的任务书任务书:下肢外骨骼机器人辅助行走控制研究一、研究背景近年来,随着生活水平的提高和医疗技术的不断进步,老年人口和残疾人口在不断增加,许多人在日常生活中无法进行正常的行走,严重影响了他们的生活质量。而下肢外骨骼机器人成为一种新型的康复治疗设备,能够有效地帮助这些患者进行行走训练。下肢外骨骼机器人通过对人体下肢的辅助和支持,使患者得以独立行走,得到更好的康复效果。然而,下肢外骨骼机器人的研制和应用仍存在着一系列问题,其中最主要的问题就是如何实现对下肢机器人的控制。目前,国