
导向机构、下肢康复外骨骼和外骨骼机器人.pdf

书生****35


1/10
2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
导向机构、下肢康复外骨骼和外骨骼机器人.pdf
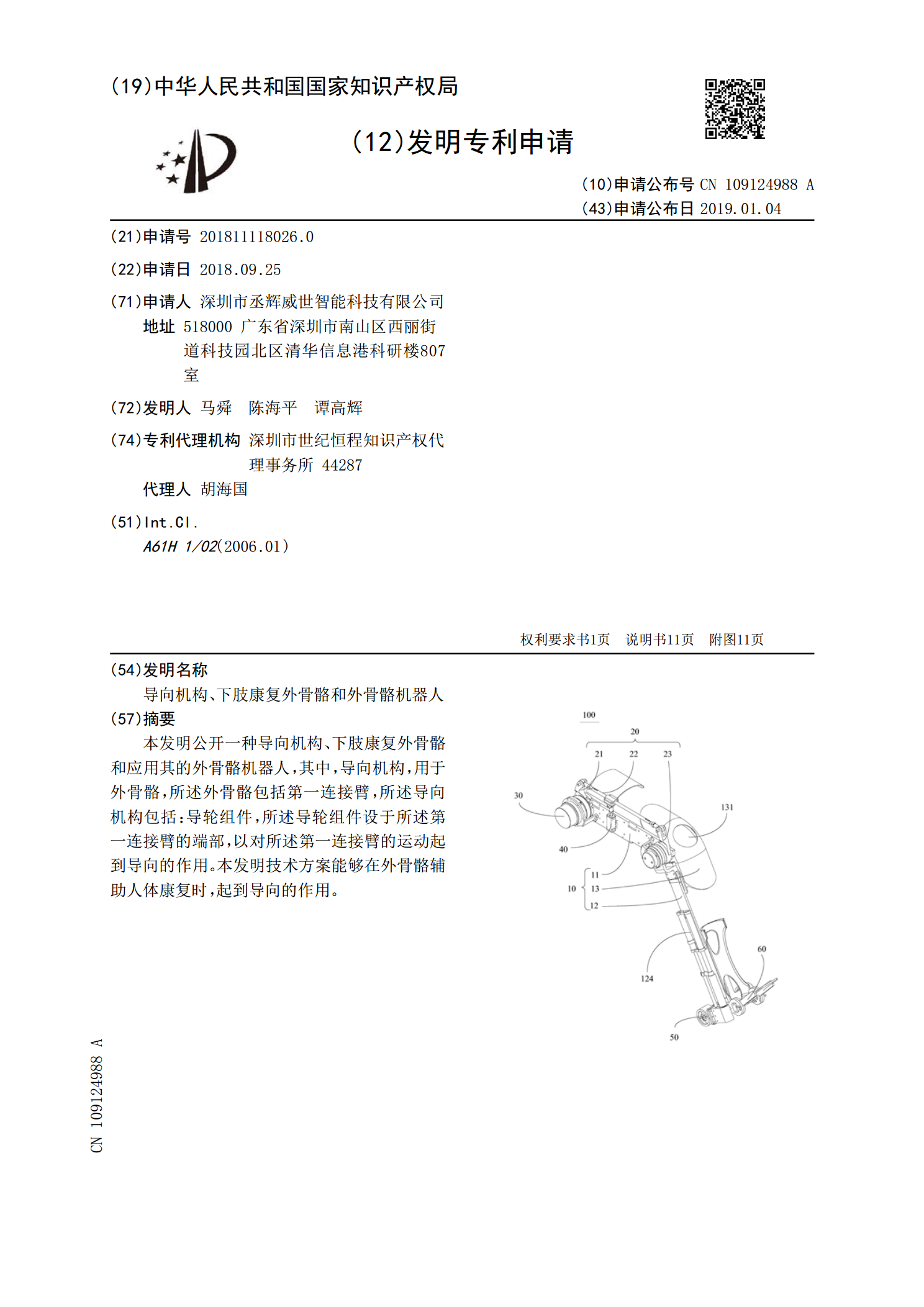
本发明公开一种导向机构、下肢康复外骨骼和应用其的外骨骼机器人,其中,导向机构,用于外骨骼,所述外骨骼包括第一连接臂,所述导向机构包括:导轮组件,所述导轮组件设于所述第一连接臂的端部,以对所述第一连接臂的运动起到导向的作用。本发明技术方案能够在外骨骼辅助人体康复时,起到导向的作用。
下肢康复外骨骼.pdf
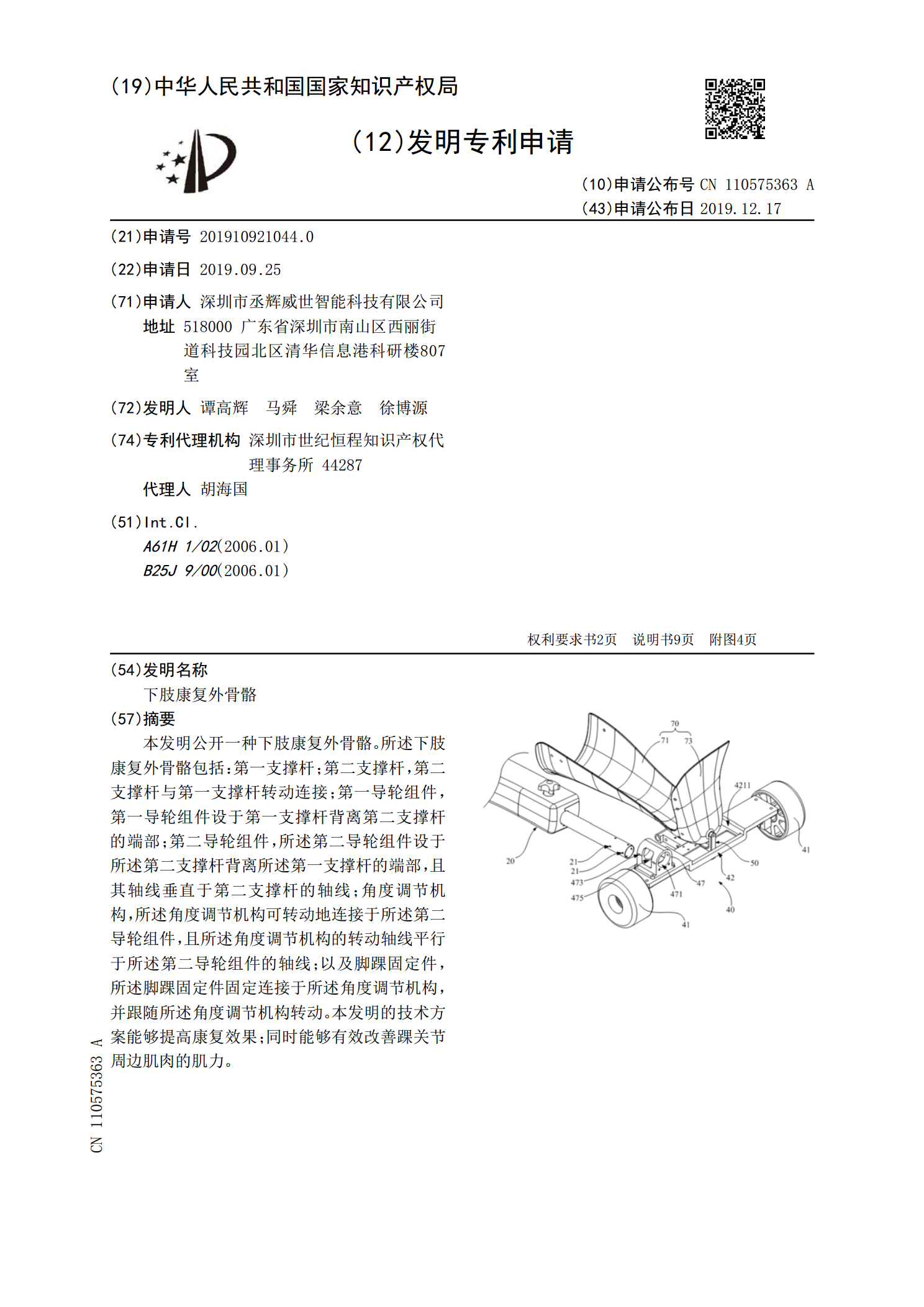
本发明公开一种下肢康复外骨骼。所述下肢康复外骨骼包括:第一支撑杆;第二支撑杆,第二支撑杆与第一支撑杆转动连接;第一导轮组件,第一导轮组件设于第一支撑杆背离第二支撑杆的端部;第二导轮组件,所述第二导轮组件设于所述第二支撑杆背离所述第一支撑杆的端部,且其轴线垂直于第二支撑杆的轴线;角度调节机构,所述角度调节机构可转动地连接于所述第二导轮组件,且所述角度调节机构的转动轴线平行于所述第二导轮组件的轴线;以及脚踝固定件,所述脚踝固定件固定连接于所述角度调节机构,并跟随所述角度调节机构转动。本发明的技术方案能够提高康

下肢康复外骨骼机构的运动学分析.docx
下肢康复外骨骼机构的运动学分析标题:下肢康复外骨骼机构的运动学分析摘要:下肢康复外骨骼机构是一种新型的辅助康复设备,通过与人体下肢骨骼结构相结合,可以提供力量支持和运动补偿,以帮助患有下肢肌肉功能障碍的人恢复正常的行走能力。运动学分析是研究外骨骼机构运动特征和人体之间的关系的重要手段。本文对下肢康复外骨骼机构的运动学分析进行探讨,从外骨骼机构的结构、关节运动范围、步态特征等方面提供详尽的信息,以期为康复外骨骼机构的研发和康复效果评估提供理论依据。1.引言下肢康复外骨骼机构是一种利用先进的机械工程和生物力学

下肢康复外骨骼机器人设计与性能分析.docx
下肢康复外骨骼机器人设计与性能分析目录一、内容概述................................................21.1研究背景.............................................31.2研究目的与意义.......................................41.3国内外研究现状及发展趋势.............................5二、下肢康复外骨骼机器人的设计原理................

下肢外骨骼康复机器人系统设计与研究.docx
下肢外骨骼康复机器人系统设计与研究随着科技的发展和人们对健康和康复的关注度不断提高,康复机器人成为近年来研究的热点之一。康复机器人带来的不仅是机器人技术的应用,更为重要的是,它为残疾人士的日常生活和康复提供了有效的辅助手段,让他们能够更好地参与社会和工作。本文将介绍下肢外骨骼康复机器人系统的设计与研究。我们将介绍外骨骼康复机器人的概念及其作用,并阐述下肢外骨骼康复机器人系统的设计与实现。最后,我们将讨论下肢外骨骼康复机器人系统的应用前景。一、下肢外骨骼康复机器人的概念及其作用下肢外骨骼康复机器人是应用外骨