
车道变换协商方法和系统.pdf

书生****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车道变换协商方法和系统.pdf
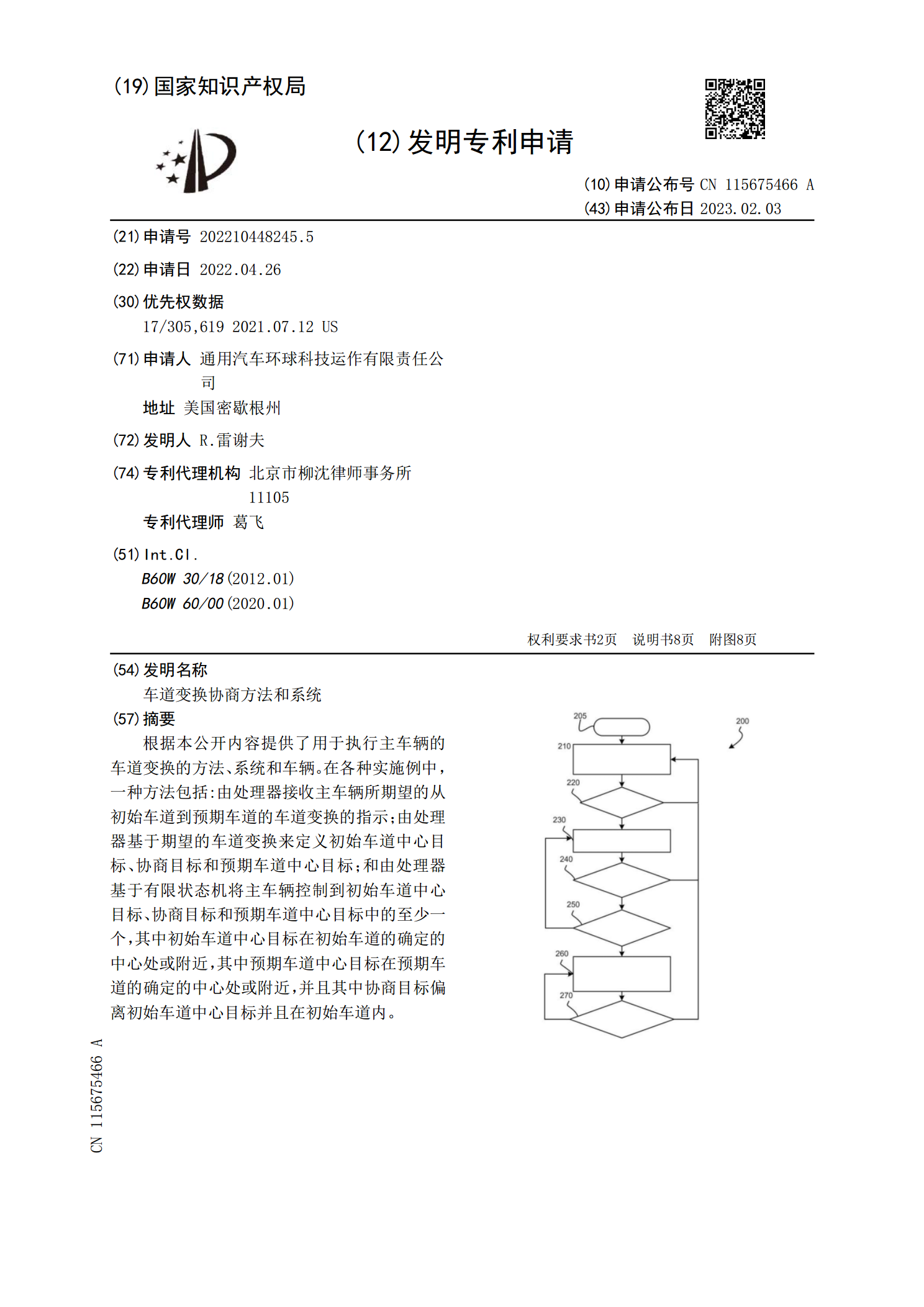
根据本公开内容提供了用于执行主车辆的车道变换的方法、系统和车辆。在各种实施例中,一种方法包括:由处理器接收主车辆所期望的从初始车道到预期车道的车道变换的指示;由处理器基于期望的车道变换来定义初始车道中心目标、协商目标和预期车道中心目标;和由处理器基于有限状态机将主车辆控制到初始车道中心目标、协商目标和预期车道中心目标中的至少一个,其中初始车道中心目标在初始车道的确定的中心处或附近,其中预期车道中心目标在预期车道的确定的中心处或附近,并且其中协商目标偏离初始车道中心目标并且在初始车道内。

一种城市智能车道变换方法及智能车道变换系统.pdf
本发明公开了一种城市智能车道变换方法及智能车道变换系统。所述城市智能车道变换系统与所述城市智能车道变换方法配合使用。所述智能车道变换系统包括车道车流量检测系统和车道红绿灯综合联控系统。本发明通过对智能车道各个方向的通行优先级作比较,选择合适的智能车道变换模式。然后将相应方向上的绿灯通行时间与车道变换预留时间进行比较,调整所述智能车道导向状态,并通过车道信息指示模块进行显示以方便驾驶者得知智能车道最新状态。本发明通过上述方法可以实现智能车道与路口红绿灯进行联控,使得智能车道能根据实际交通状况进行实时变换,从

车辆的车道变换辅助系统及其方法.pdf
本发明涉及车辆的车道变换辅助系统及其方法。本发明的车辆的车道变换辅助系统及其方法包括:车轮速度检测部,其检测车辆的车轮速度;转向角检测部,其检测车辆的转向角;微控制器单元,其利用车轮速度和转向角,当变换车道时,在想要变换的车道上,后行的车辆威胁到所述车辆时,计算出将车辆变换到原来的车道上所需要的必要横摆角速度值,并比较必要横摆角速度值和预设值,根据比较结果,辅助所述车辆的车道变换动作。
密钥协商方法和系统.pdf
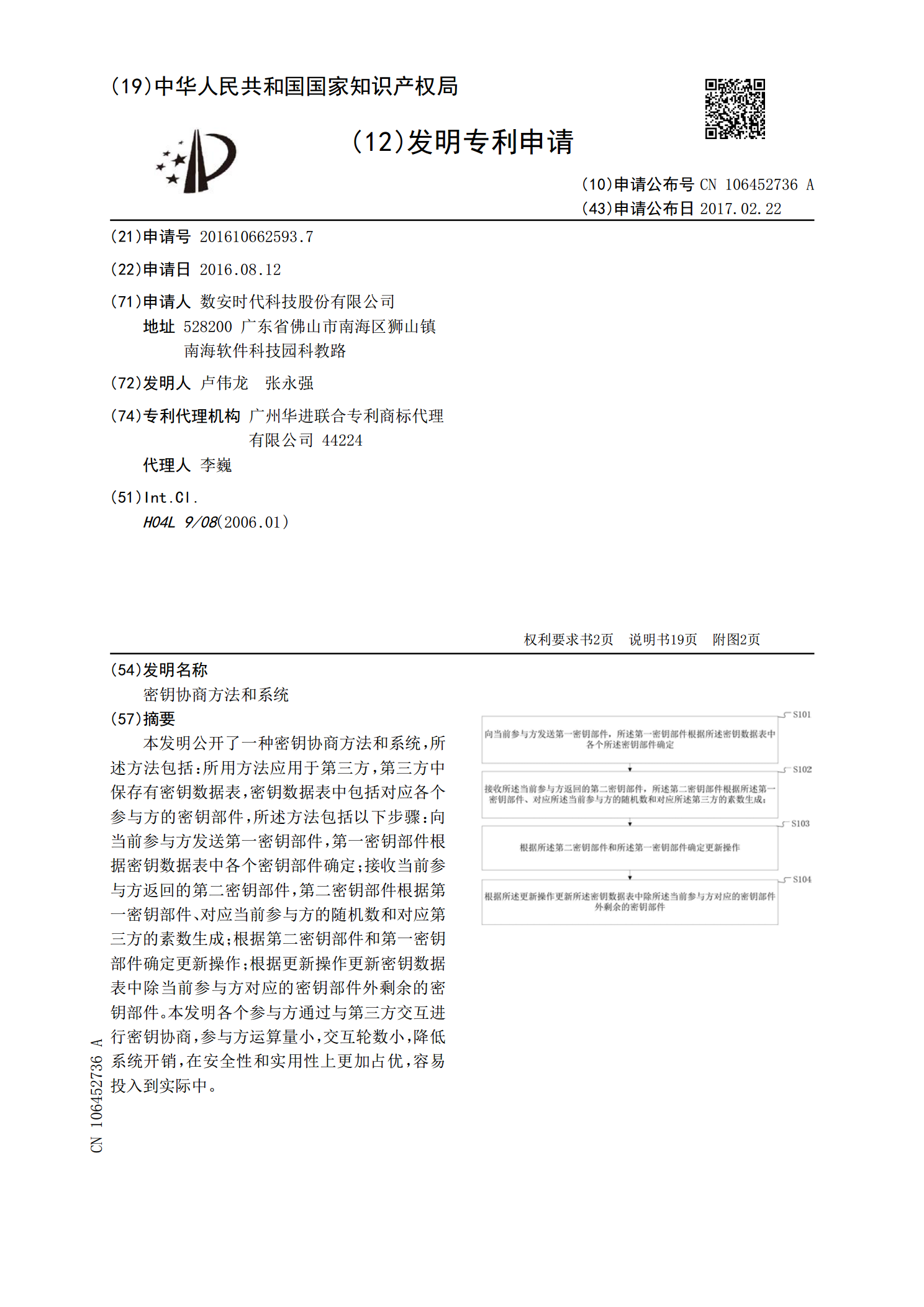
本发明公开了一种密钥协商方法和系统,所述方法包括:所用方法应用于第三方,第三方中保存有密钥数据表,密钥数据表中包括对应各个参与方的密钥部件,所述方法包括以下步骤:向当前参与方发送第一密钥部件,第一密钥部件根据密钥数据表中各个密钥部件确定;接收当前参与方返回的第二密钥部件,第二密钥部件根据第一密钥部件、对应当前参与方的随机数和对应第三方的素数生成;根据第二密钥部件和第一密钥部件确定更新操作;根据更新操作更新密钥数据表中除当前参与方对应的密钥部件外剩余的密钥部件。本发明各个参与方通过与第三方交互进行密钥协商,
车道偏离预警方法和系统.pdf
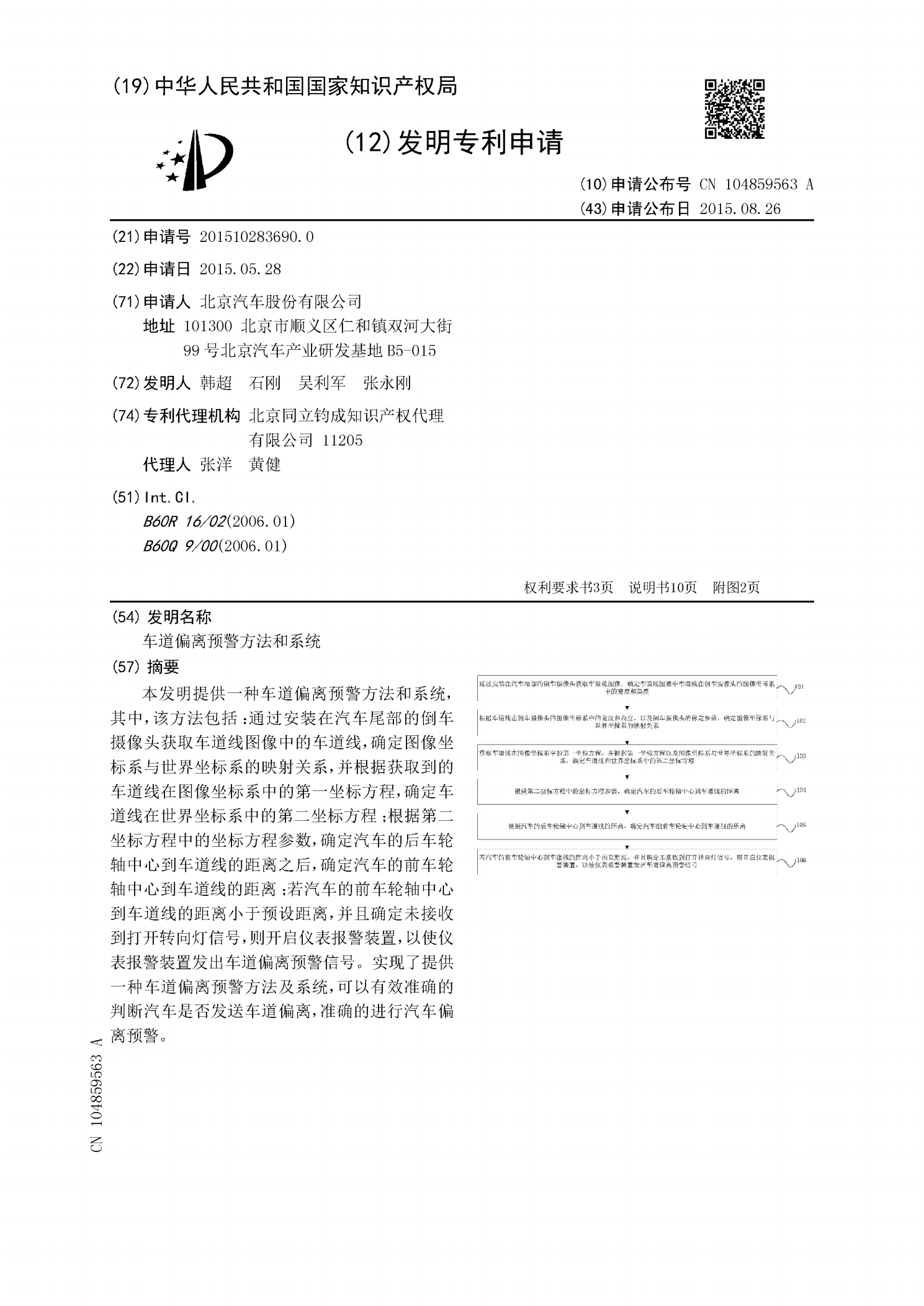
本发明提供一种车道偏离预警方法和系统,其中,该方法包括:通过安装在汽车尾部的倒车摄像头获取车道线图像中的车道线,确定图像坐标系与世界坐标系的映射关系,并根据获取到的车道线在图像坐标系中的第一坐标方程,确定车道线在世界坐标系中的第二坐标方程;根据第二坐标方程中的坐标方程参数,确定汽车的后车轮轴中心到车道线的距离之后,确定汽车的前车轮轴中心到车道线的距离;若汽车的前车轮轴中心到车道线的距离小于预设距离,并且确定未接收到打开转向灯信号,则开启仪表报警装置,以使仪表报警装置发出车道偏离预警信号。实现了提供一种车道