
车辆的车道变换辅助系统及其方法.pdf

猫巷****松臣


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆的车道变换辅助系统及其方法.pdf
本发明涉及车辆的车道变换辅助系统及其方法。本发明的车辆的车道变换辅助系统及其方法包括:车轮速度检测部,其检测车辆的车轮速度;转向角检测部,其检测车辆的转向角;微控制器单元,其利用车轮速度和转向角,当变换车道时,在想要变换的车道上,后行的车辆威胁到所述车辆时,计算出将车辆变换到原来的车道上所需要的必要横摆角速度值,并比较必要横摆角速度值和预设值,根据比较结果,辅助所述车辆的车道变换动作。
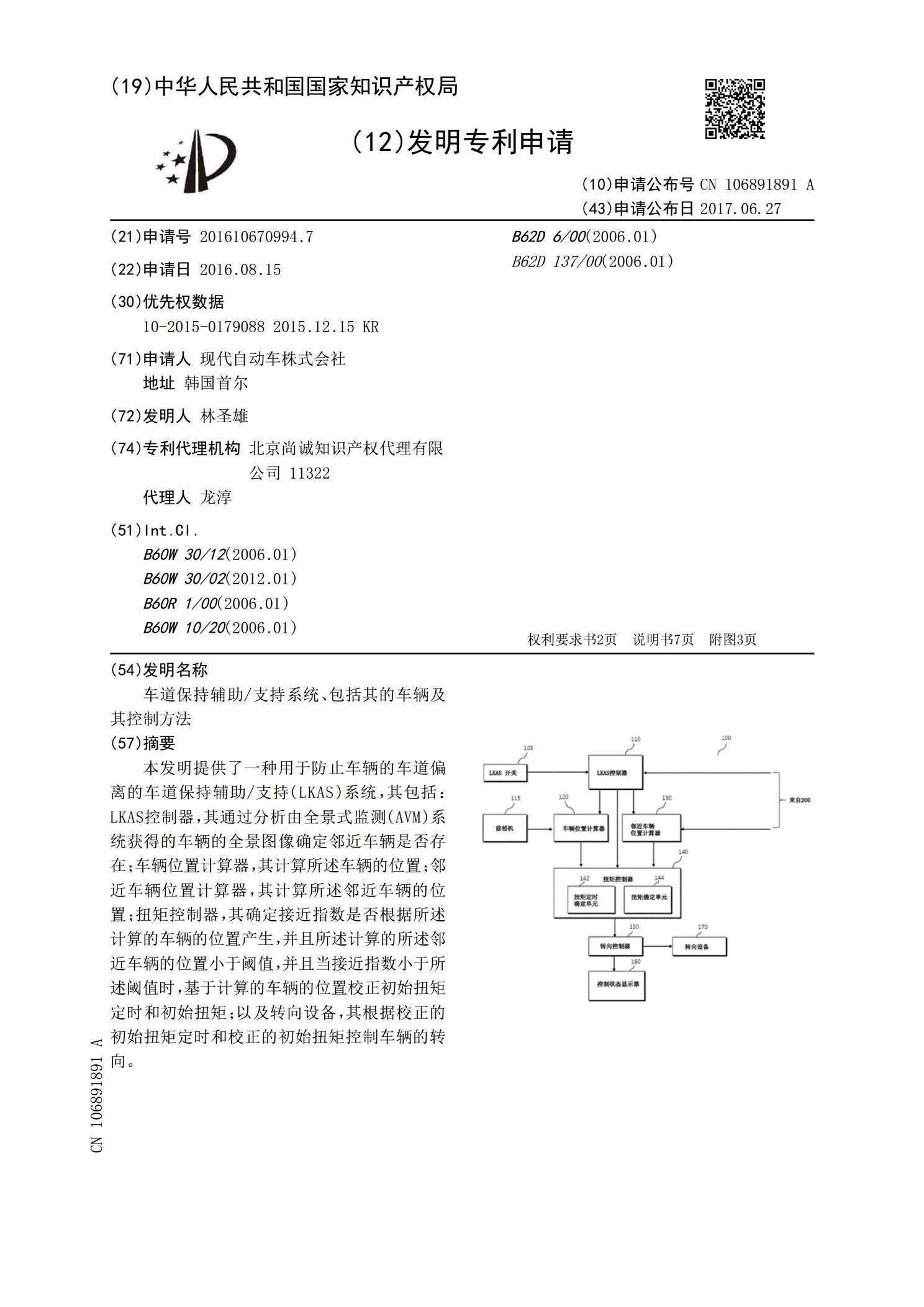
车道保持辅助/支持系统、包括其的车辆及其控制方法.pdf
本发明提供了一种用于防止车辆的车道偏离的车道保持辅助/支持(LKAS)系统,其包括:LKAS控制器,其通过分析由全景式监测(AVM)系统获得的车辆的全景图像确定邻近车辆是否存在;车辆位置计算器,其计算所述车辆的位置;邻近车辆位置计算器,其计算所述邻近车辆的位置;扭矩控制器,其确定接近指数是否根据所述计算的车辆的位置产生,并且所述计算的所述邻近车辆的位置小于阈值,并且当接近指数小于所述阈值时,基于计算的车辆的位置校正初始扭矩定时和初始扭矩;以及转向设备,其根据校正的初始扭矩定时和校正的初始扭矩控制车辆的转向

用于加速车辆的转弯车道辅助系统.pdf
本发明涉及一种机动车辆输出轴的驱动轮的目的制动的方法,为了提高车辆的稳定性,特别是在加速过程中,提出以下步骤:a.确定特性附着值,b.通过三维特性图得到准静态路径半径设定值,c.通过特性图映射机动车辆的不足转向梯度,d.得到轮轴的车轮差动速度设定值,e.得到轮轴的车轮实际差动速度,以及f.如果实际差动速度小于差动速度设定值,设定制动一个车轮的制动转矩,其中g.为了转动太快的车轮的目的制动,在闭合控制回路中得到设定的制动转矩,并且将其输出到各制动装置。
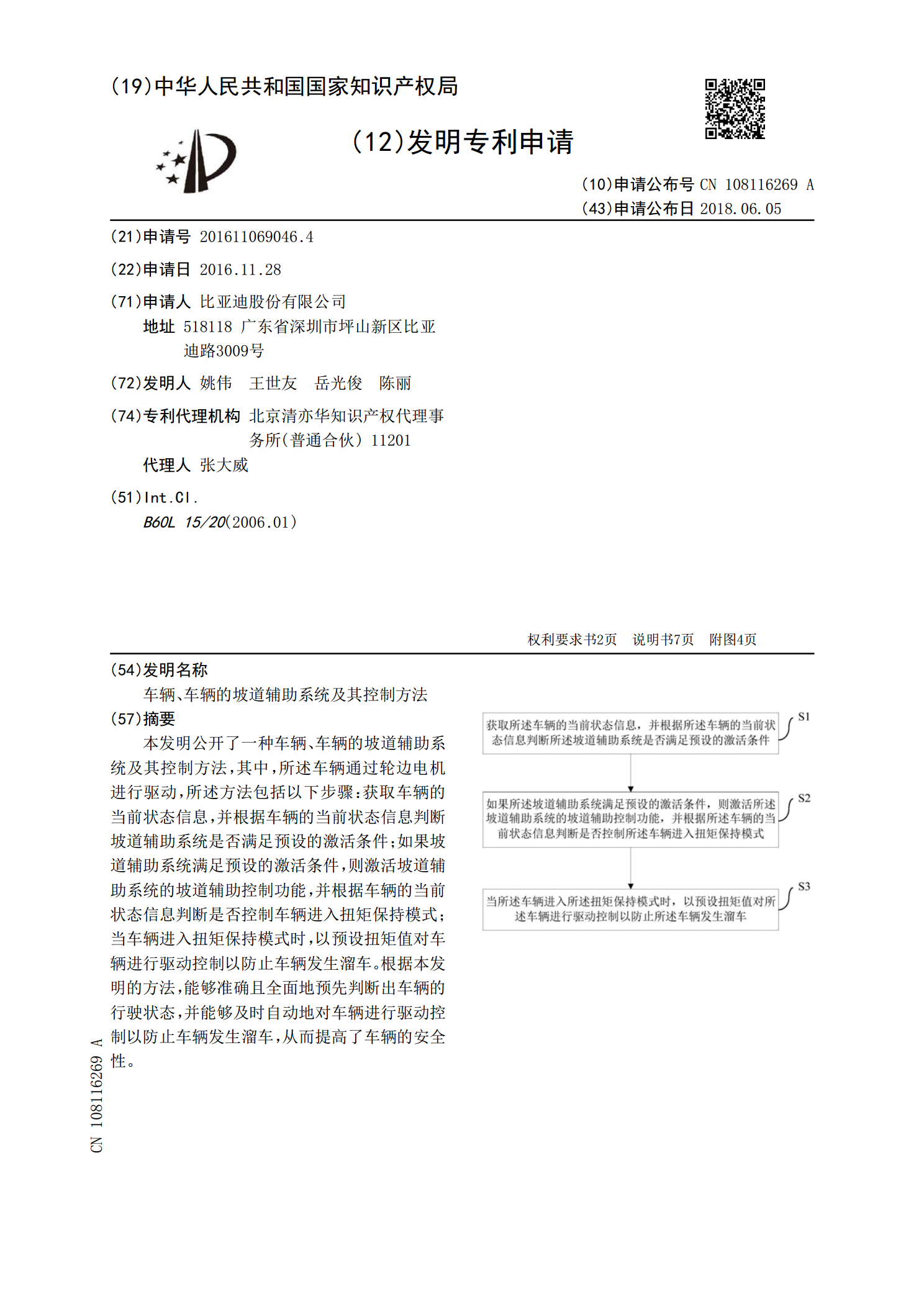
车辆、车辆的坡道辅助系统及其控制方法.pdf
本发明公开了一种车辆、车辆的坡道辅助系统及其控制方法,其中,所述车辆通过轮边电机进行驱动,所述方法包括以下步骤:获取车辆的当前状态信息,并根据车辆的当前状态信息判断坡道辅助系统是否满足预设的激活条件;如果坡道辅助系统满足预设的激活条件,则激活坡道辅助系统的坡道辅助控制功能,并根据车辆的当前状态信息判断是否控制车辆进入扭矩保持模式;当车辆进入扭矩保持模式时,以预设扭矩值对车辆进行驱动控制以防止车辆发生溜车。根据本发明的方法,能够准确且全面地预先判断出车辆的行驶状态,并能够及时自动地对车辆进行驱动控制以防止车
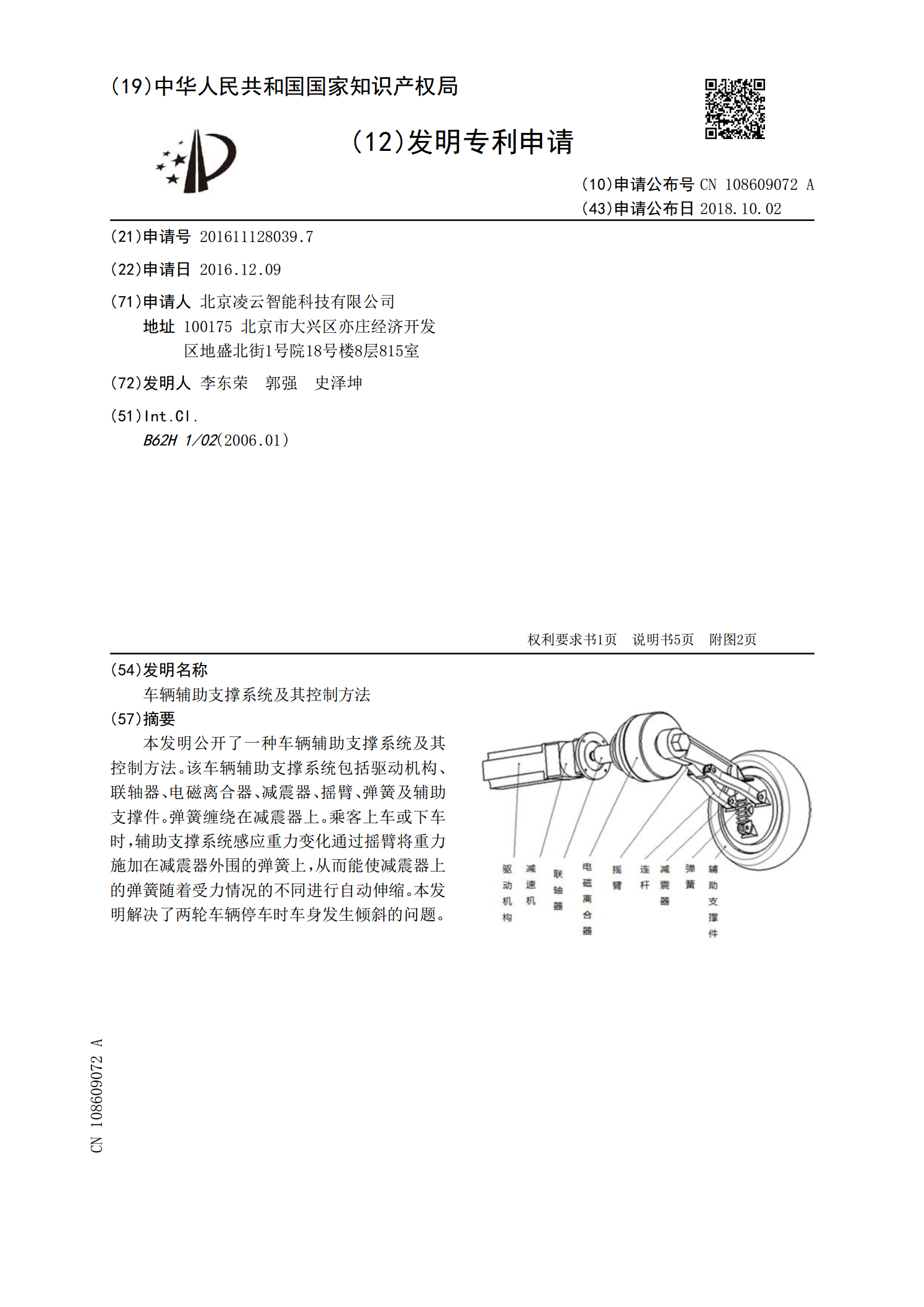
车辆辅助支撑系统及其控制方法.pdf
本发明公开了一种车辆辅助支撑系统及其控制方法。该车辆辅助支撑系统包括驱动机构、联轴器、电磁离合器、减震器、摇臂、弹簧及辅助支撑件。弹簧缠绕在减震器上。乘客上车或下车时,辅助支撑系统感应重力变化通过摇臂将重力施加在减震器外围的弹簧上,从而能使减震器上的弹簧随着受力情况的不同进行自动伸缩。本发明解决了两轮车辆停车时车身发生倾斜的问题。