
基于自动驾驶的车道选择方法及装置.pdf

邻家****mk


1/10

2/10
3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于自动驾驶的车道选择方法及装置.pdf
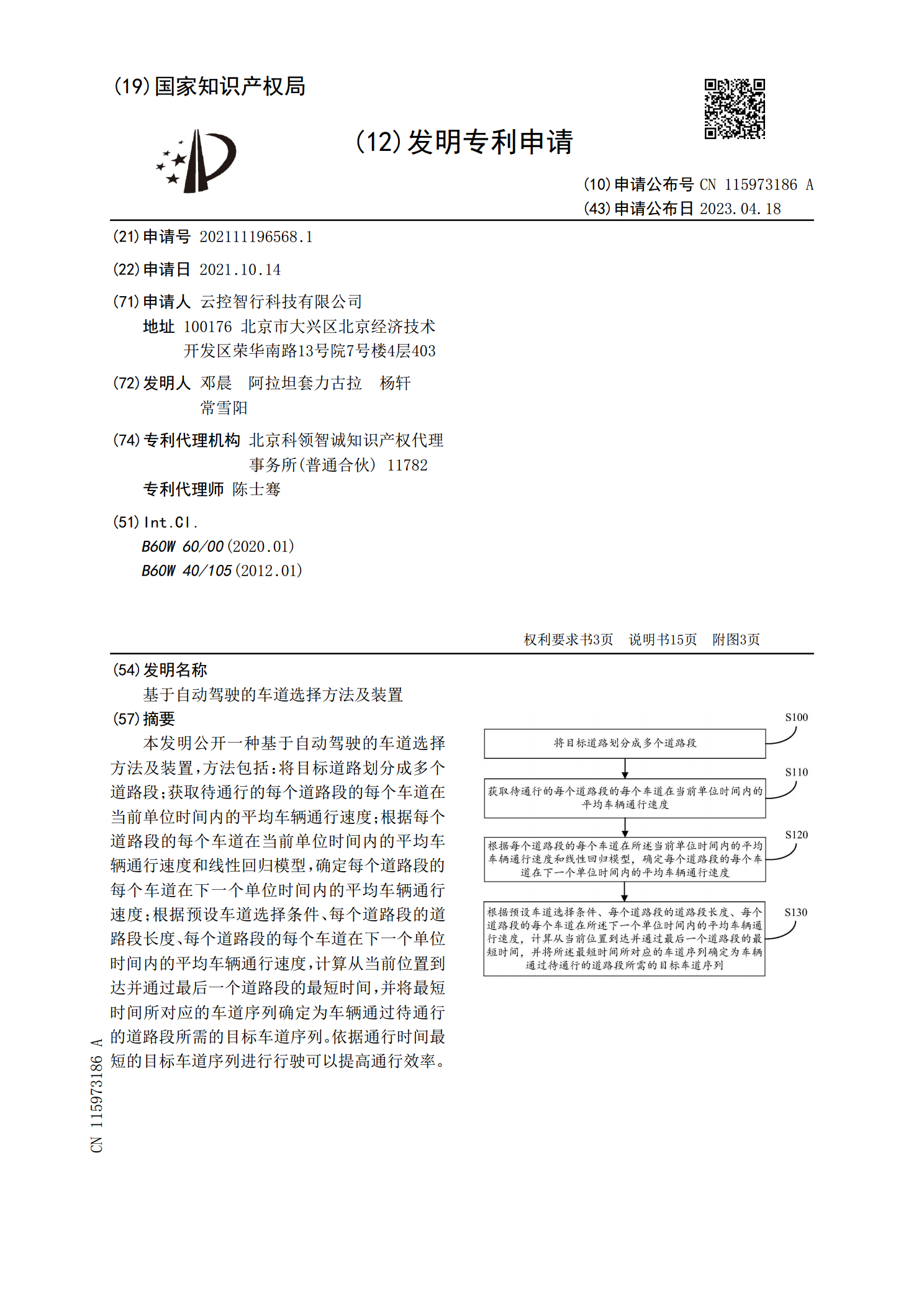
本发明公开一种基于自动驾驶的车道选择方法及装置,方法包括:将目标道路划分成多个道路段;获取待通行的每个道路段的每个车道在当前单位时间内的平均车辆通行速度;根据每个道路段的每个车道在当前单位时间内的平均车辆通行速度和线性回归模型,确定每个道路段的每个车道在下一个单位时间内的平均车辆通行速度;根据预设车道选择条件、每个道路段的道路段长度、每个道路段的每个车道在下一个单位时间内的平均车辆通行速度,计算从当前位置到达并通过最后一个道路段的最短时间,并将最短时间所对应的车道序列确定为车辆通过待通行的道路段所需的目标

自动驾驶车道变换的识别方法及装置.pdf
本申请涉及一种自动驾驶车道变换的识别方法及装置。该方法包括:在目标时间段内拟合连续道路图片获取车道线表达;获取初始化道路图片,并建立初始化道路图片中的实际车道线和车道线表达式之间的对应关系;根据初始化道路图片中的实际车道线和车道线表达式之间的对应关系,识别第N张图片中的实际车道线;选取至少一条实际车道线,获取初始化道路图片对应至少一条实际车道线的第一车道线,获取第N张图片对应至少一条实际车道线的第N车道线,在相同图像坐标系下,计算第一实际车道线和第N车道线之间的位移差值,在位移差值符合预设位移差值的情况下

车道选择装置、车辆控制系统及车道选择方法.pdf
本发明提供车道选择装置、车辆控制系统及车道选择方法,能够执行在道路设有多条车道的前提下的处理。自动驾驶支援装置(500)具备:具有与道路的车道相关的车道信息的地图数据库(541);确定车辆的当前位置的位置确定部(173);基于车道信息计算行驶中的道路的每条车道的推荐度并基于计算出的推荐度选择行驶的车道的推荐车道选择部(171)。因此,能够在道路上设有多条车道的前提下来选择推荐车道。

基于LSTM的自动驾驶车道预测与决策方法研究.docx
基于LSTM的自动驾驶车道预测与决策方法研究摘要:随着自动驾驶技术的逐渐成熟,车道预测与决策一直是自动驾驶系统中的重要问题。本文将基于LSTM神经网络,提出一种自动驾驶车道预测与决策方法。该方法使用LSTM网络从历史车道数据中学习车道变化规律,并决策当前所在车道的最优行驶方式。通过实验验证,该方法在车道预测与决策方面具有较好的性能和实用价值。关键词:自动驾驶、车道预测、决策、LSTM引言:自动驾驶技术已经成为现代交通领域的热门话题。车道预测与决策一直是自动驾驶系统中的重要问题,它涉及到自动驾驶车辆的安全性

自动驾驶车道保持方法、装置、终端设备及存储介质.pdf
本公开涉及车辆技术领域,尤其涉及一种自动驾驶车道保持方法、装置、终端设备及存储介质。所述方法:获取处于车道保持状态的待转向的车辆的车道信息,车道信息用于指示车辆的车路偏差情况;获取车辆的转向控制参数,转向控制参数是基于车辆的样本车道信息和样本转向信息进行自学习得到的参数;根据车道信息和转向控制参数,确定车辆的转向信息,转向信息用于控制车辆在转向过程中进行车道保持。本公开实施例通过根据自学习得到的转向控制信息和用于指示车路偏差的车道信息,能够准确地确定出车辆的转向信息,从而提高了车道保持功能,提高了车辆控制