
基于LSTM的自动驾驶车道预测与决策方法研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于LSTM的自动驾驶车道预测与决策方法研究.docx
基于LSTM的自动驾驶车道预测与决策方法研究摘要:随着自动驾驶技术的逐渐成熟,车道预测与决策一直是自动驾驶系统中的重要问题。本文将基于LSTM神经网络,提出一种自动驾驶车道预测与决策方法。该方法使用LSTM网络从历史车道数据中学习车道变化规律,并决策当前所在车道的最优行驶方式。通过实验验证,该方法在车道预测与决策方面具有较好的性能和实用价值。关键词:自动驾驶、车道预测、决策、LSTM引言:自动驾驶技术已经成为现代交通领域的热门话题。车道预测与决策一直是自动驾驶系统中的重要问题,它涉及到自动驾驶车辆的安全性
基于自动驾驶的车道选择方法及装置.pdf
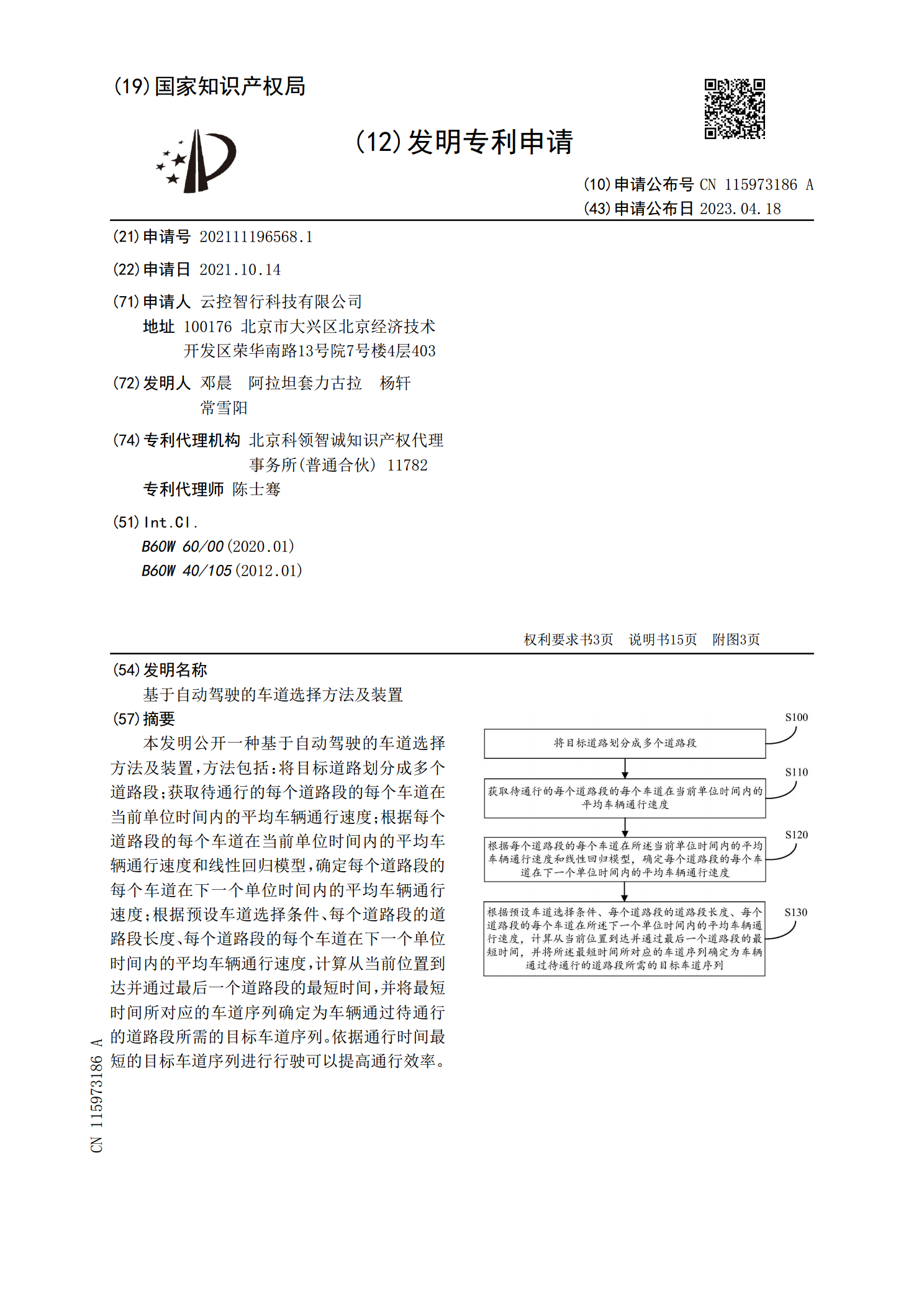
本发明公开一种基于自动驾驶的车道选择方法及装置,方法包括:将目标道路划分成多个道路段;获取待通行的每个道路段的每个车道在当前单位时间内的平均车辆通行速度;根据每个道路段的每个车道在当前单位时间内的平均车辆通行速度和线性回归模型,确定每个道路段的每个车道在下一个单位时间内的平均车辆通行速度;根据预设车道选择条件、每个道路段的道路段长度、每个道路段的每个车道在下一个单位时间内的平均车辆通行速度,计算从当前位置到达并通过最后一个道路段的最短时间,并将最短时间所对应的车道序列确定为车辆通过待通行的道路段所需的目标

用于自动驾驶车辆的基于多目标决策矩阵的车道决策方法.pdf
本发明提供一种用于自动驾驶车辆的基于多目标决策矩阵的车道决策方法,包括下列步骤:(1)以自动驾驶车辆左侧车道、所在车道和右侧车道作为待决策车道,在确定的导航路线上,采集每条待决策车道上能继续行驶的距离和限速信息,对每条待决策车道信息进行量化,得到每条待决策车道的评价信息;(2)采集每条待决策车道上相对自动驾驶车辆纵向距离最近的前后两侧的障碍物信息,判断前后两个障碍物的当前位置和速度信息,以及设定时间后的位置信息,并计算出当前时刻和设定时间前后两个障碍物分别相对自动驾驶车辆的相对距离;(3)将上述信息整理得

基于LSTM的关联时间序列预测方法研究.docx
基于LSTM的关联时间序列预测方法研究基于LSTM的关联时间序列预测方法研究摘要:时间序列预测是一种非常重要的数据分析方法,在许多领域中都有广泛的应用。然而,由于时间序列数据的非线性、非平稳和高度相关性等特点,传统的预测方法往往无法取得令人满意的结果。近年来,深度学习技术的快速发展为时间序列预测带来了新的解决方案。本文提出了一种基于长短期记忆网络(LSTM)的关联时间序列预测方法。LSTM是一种在处理长期依赖问题时表现优秀的循环神经网络模型。通过对时间序列数据进行特征提取和建模,LSTM网络可以捕捉数据的

基于LSTM的风电功率预测方法研究.docx
基于LSTM的风电功率预测方法研究目录一、内容简述................................................21.1研究背景.............................................21.2研究目的与意义.......................................31.3文献综述.............................................4二、风电功率预测方法理论基础...........