
一种飞行器的飞行控制方法、装置及介质.pdf

一吃****仕龙


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种飞行器的飞行控制方法、装置及介质.pdf
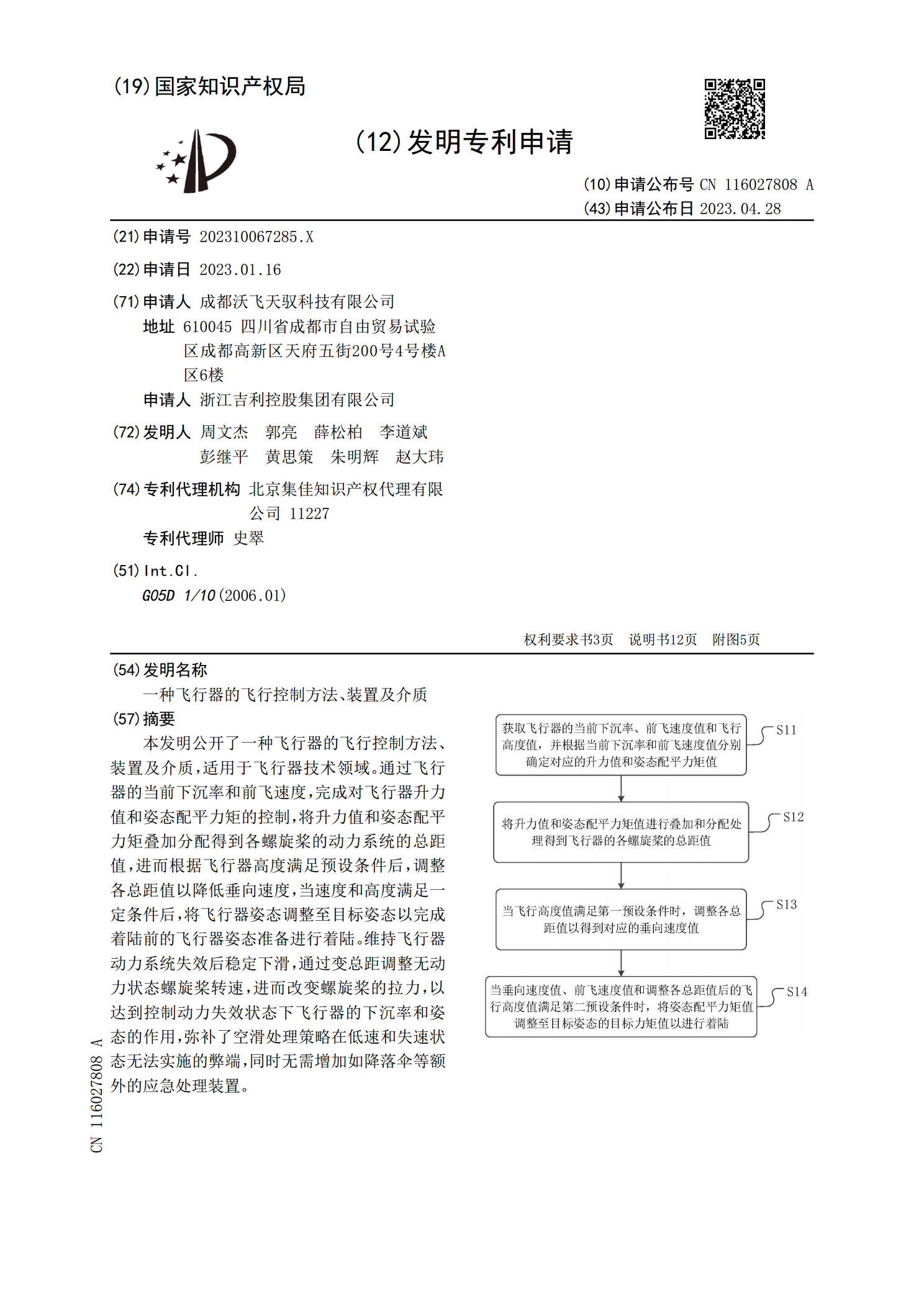
本发明公开了一种飞行器的飞行控制方法、装置及介质,适用于飞行器技术领域。通过飞行器的当前下沉率和前飞速度,完成对飞行器升力值和姿态配平力矩的控制,将升力值和姿态配平力矩叠加分配得到各螺旋桨的动力系统的总距值,进而根据飞行器高度满足预设条件后,调整各总距值以降低垂向速度,当速度和高度满足一定条件后,将飞行器姿态调整至目标姿态以完成着陆前的飞行器姿态准备进行着陆。维持飞行器动力系统失效后稳定下滑,通过变总距调整无动力状态螺旋桨转速,进而改变螺旋桨的拉力,以达到控制动力失效状态下飞行器的下沉率和姿态的作用,弥补

垂直起降飞行器的控制方法、装置、设备、介质及飞行器.pdf
本发明公开了一种垂直起降飞行器的控制方法,包括:获取当前时刻的悬停控制量;根据所述当前时刻的悬停控制量估计旋翼产生的第一升力;根据垂直飞行器在过渡阶段保持稳定所需的总升力以及所述第一升力得到机身机翼产生的第二升力;根据所述第一升力和所述第二升力确定所述飞行器当前的飞行阶段;基于所述飞行阶段和飞行器的操纵指令对飞行器进行控制。本发明选取间接反映悬停系统升力的悬停控制量作为参考量来作为在空速故障的情况下飞行器飞行状态的判断依据,提高了转换阶段的平稳性、安全性、可靠性。
垂直起降飞行器的控制方法、装置、设备、介质及飞行器.pdf
本发明公开了一种垂直起降飞行器的控制方法,包括:获取当前时刻的悬停控制量;根据所述当前时刻的悬停控制量估计旋翼产生的第一升力;根据垂直飞行器在过渡阶段保持稳定所需的总升力以及所述第一升力得到机身机翼产生的第二升力;根据所述第一升力和所述第二升力确定所述飞行器当前的飞行阶段;基于所述飞行阶段和飞行器的操纵指令对飞行器进行控制。本发明选取间接反映悬停系统升力的悬停控制量作为参考量来作为在空速故障的情况下飞行器飞行状态的判断依据,提高了转换阶段的平稳性、安全性、可靠性。

飞行器操纵舵面无极切换控制方法、装置、飞行器及介质.pdf
本发明公开了一种飞行器操纵舵面无极切换控制方法、装置、飞行器及介质,该方法包括根据获取的舵效和舵效与力矩的关系,建立力矩权限控制表达式,在接收到操纵舵面切换指令时,对机械操纵舵面和所述射流操纵舵面执行控制权限调整;再根据机械操纵舵面对应的第一控制权限和射流操纵舵面对应的第二控制权限,利用力矩权限控制表达式,确定所述机械操纵舵面的目标偏角和射流操纵舵面的目标压比,以实现机械操纵舵面和射流操纵舵面的无极切换控制。本发明通过调整控制权限的无极控制方法,逐步控制机械操纵舵面和射流操纵舵面的状态,在保证飞行器飞行姿

一种无人飞行器的控制方法、无人飞行器及存储介质.pdf
一种无人飞行器的控制方法、无人飞行器及存储介质,其中,该方法包括:根据无人飞行器的传感器输出的传感数据确定障碍物与无人飞行器之间的距离(S201);当距离小于或等于预设距离阈值时,控制无人飞行器执行展示工作任务(S202),其中,无人飞行器不处于飞行状态,展示工作任务包括无人飞行器的指示灯按照预设模式工作,和/或无人飞行器的动力部件怠速工作。该方法可以在确保安全的基础上,增加无人飞行器和用户之间的互动乐趣,以达到吸引用户注意力的目的。