
反映制约条件的目标追踪方法.pdf

一吃****仕龙


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

反映制约条件的目标追踪方法.pdf
根据本发明的一个方面,提供一种反映制约条件的目标追踪方法,是反映与相对车辆的相对距离或与相对车辆的相对速度等制约条件的目标追踪方法,其在可能有目标的区域生成N个具有状态变量的样本,如本发明的数学式1所示,用增加了补偿因子的性能指数函数,通过牛顿拉夫逊法找到最优解。本发明的实施例通过提出一种反映车辆的雷达系统所发生的与相对车辆的相对距离或与相对车辆的相对速度等诸多制约条件的目标追踪方法,使得能够较为准确地追踪目标,同时减少不必要的计算。并且如上所述,使用反映诸多制约条件的目标追踪方法,其优点是由于车辆的雷达

价格改革的目标模式及制约条件的探索.docx
价格改革的目标模式及制约条件的探索随着中国经济不断发展,价格改革逐渐成为了经济改革的重要领域之一。我们可以将价格改革的目标模式分为市场调节与政府控制两种模式。在市场调节模式下,价格完全由市场决定,政府只扮演一种监管和调节的作用。而政府控制模式下,政府完全掌握着价格的决策与控制权。无论是哪种模式,价格改革都需要满足一些制约条件才能真正取得成功。市场调节模式下的价格改革,其实质是通过市场机制来实现价格的合理调节。在这种模式下,政府应该适度介入市场,监管市场的价格走势,防止价格垄断和恶性竞争的出现。在这种市场机

一种目标追踪处理器、目标追踪方法及装置.pdf
本公开提供了一种目标追踪处理器、目标追踪方法及装置,其中,该目标追踪处理器包括:获取模块,用于获取与目标追踪指令对应的多帧目标图像,并将所述多帧目标图像传输至构建模块;构建模块,用于构建包含所述多帧目标图像对应的多个层级图像的图像金字塔;追踪模块,用于基于第N层追踪模块在第N层层级图像上进行光流追踪,并在完成光流追踪之后,将追踪结果输入至第N‑1层追踪模块,以使所述第N‑1层追踪模块基于所述追踪结果在第N‑1层层级图像上进行光流追踪。

多目标追踪系统和方法.pdf
本说明书提供的系统和方法,可以包括至少两种不同的传感系统,对目标对象分别进行定位追踪。不同的传感系统通过测量不同的物理量,来实现对目标对象的多重定位追踪。系统可以结合不同的传感系统的定位追踪结果,获取目标对象的目标位置。其中一个传感系统定位失败或定位错误,系统可以根据其他传感系统进行定位追踪,不会导致目标对象丢失,从而提高目标追踪的准确度。
图像目标追踪方法和装置.pdf
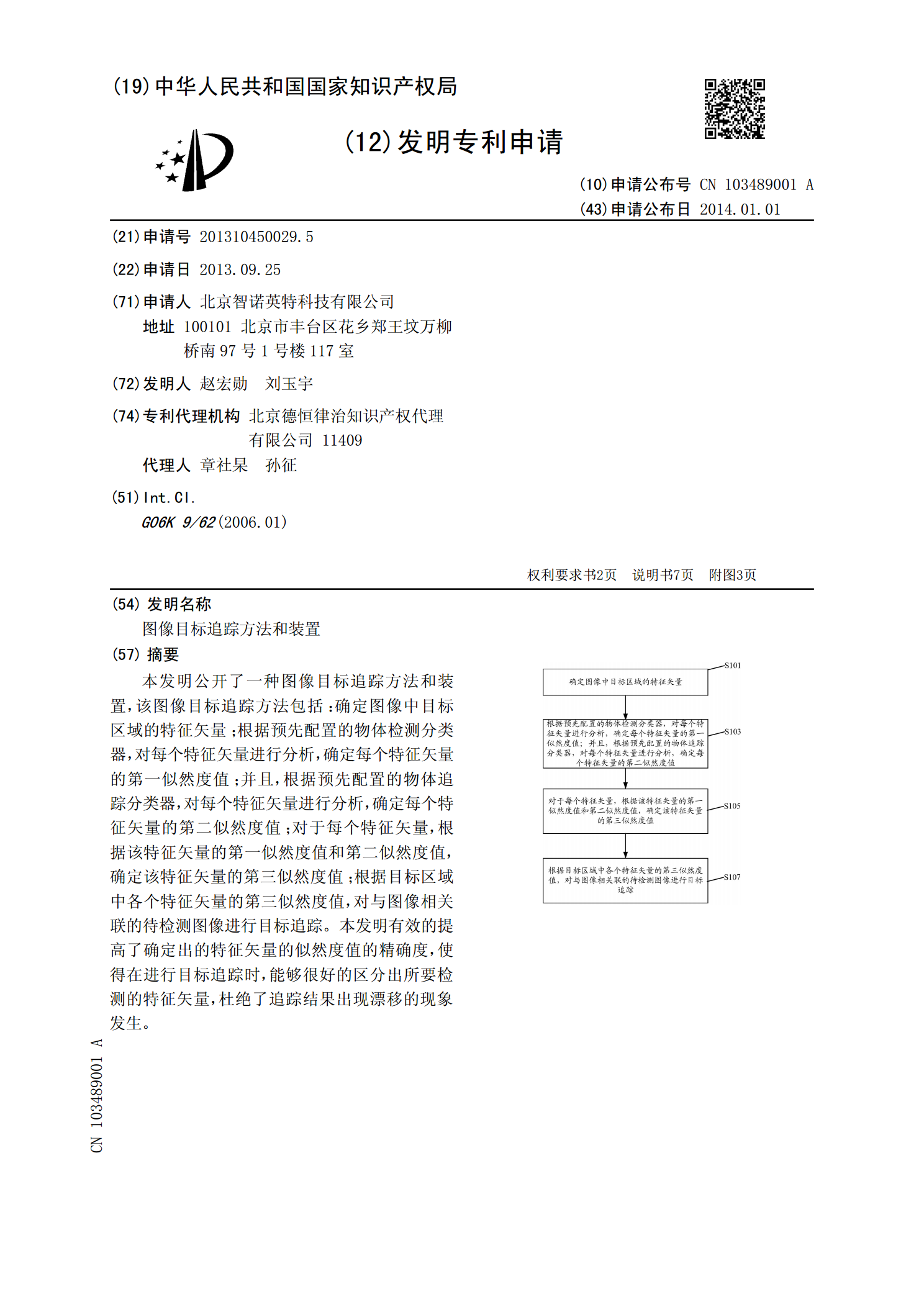
本发明公开了一种图像目标追踪方法和装置,该图像目标追踪方法包括:确定图像中目标区域的特征矢量;根据预先配置的物体检测分类器,对每个特征矢量进行分析,确定每个特征矢量的第一似然度值;并且,根据预先配置的物体追踪分类器,对每个特征矢量进行分析,确定每个特征矢量的第二似然度值;对于每个特征矢量,根据该特征矢量的第一似然度值和第二似然度值,确定该特征矢量的第三似然度值;根据目标区域中各个特征矢量的第三似然度值,对与图像相关联的待检测图像进行目标追踪。本发明有效的提高了确定出的特征矢量的似然度值的精确度,使得在进行