
一种目标追踪处理器、目标追踪方法及装置.pdf

韶敏****ab


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种目标追踪处理器、目标追踪方法及装置.pdf
本公开提供了一种目标追踪处理器、目标追踪方法及装置,其中,该目标追踪处理器包括:获取模块,用于获取与目标追踪指令对应的多帧目标图像,并将所述多帧目标图像传输至构建模块;构建模块,用于构建包含所述多帧目标图像对应的多个层级图像的图像金字塔;追踪模块,用于基于第N层追踪模块在第N层层级图像上进行光流追踪,并在完成光流追踪之后,将追踪结果输入至第N‑1层追踪模块,以使所述第N‑1层追踪模块基于所述追踪结果在第N‑1层层级图像上进行光流追踪。
一种目标追踪方法、装置、设备及介质.pdf
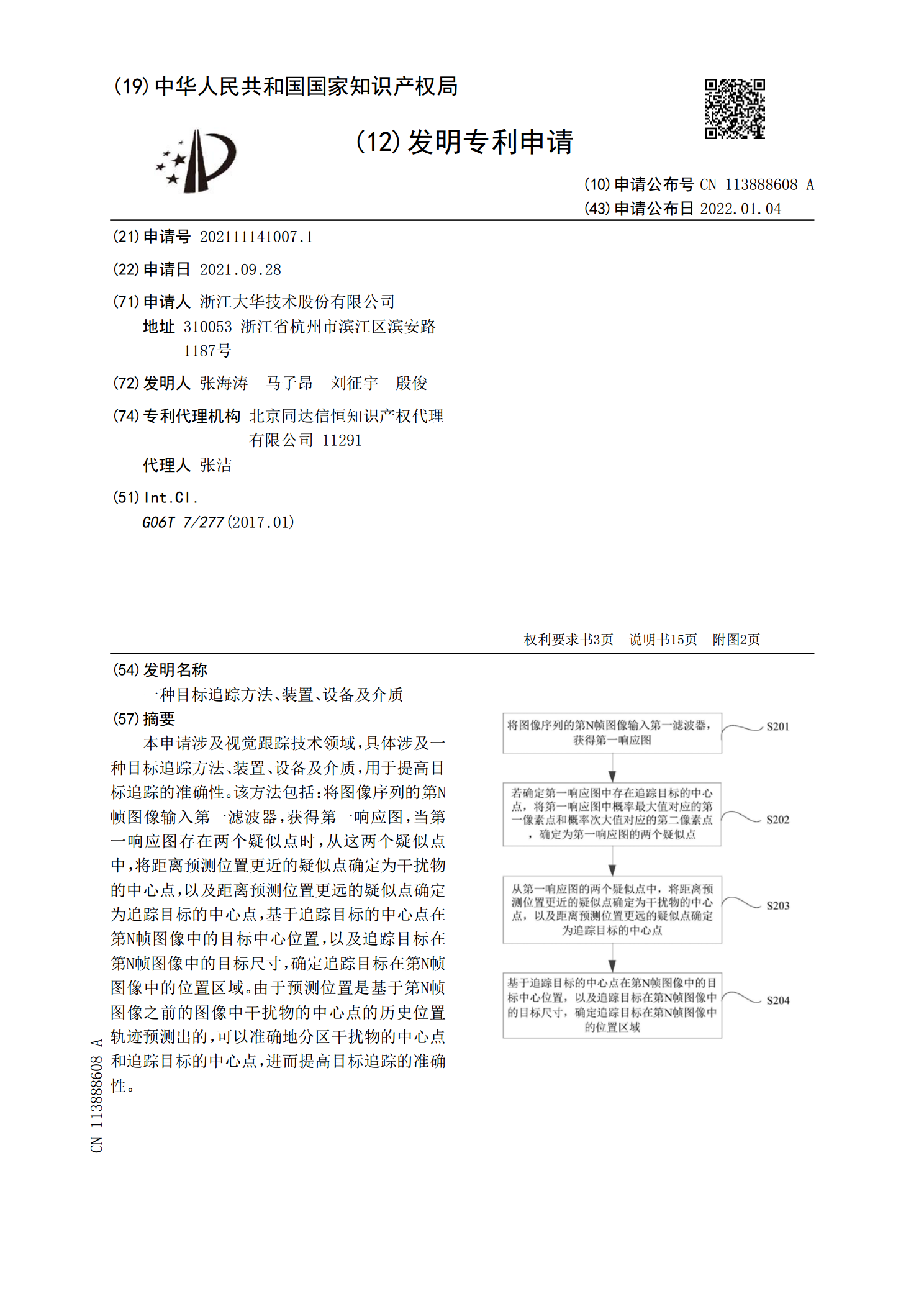
本申请涉及视觉跟踪技术领域,具体涉及一种目标追踪方法、装置、设备及介质,用于提高目标追踪的准确性。该方法包括:将图像序列的第N帧图像输入第一滤波器,获得第一响应图,当第一响应图存在两个疑似点时,从这两个疑似点中,将距离预测位置更近的疑似点确定为干扰物的中心点,以及距离预测位置更远的疑似点确定为追踪目标的中心点,基于追踪目标的中心点在第N帧图像中的目标中心位置,以及追踪目标在第N帧图像中的目标尺寸,确定追踪目标在第N帧图像中的位置区域。由于预测位置是基于第N帧图像之前的图像中干扰物的中心点的历史位置轨迹预测
图像目标追踪方法和装置.pdf
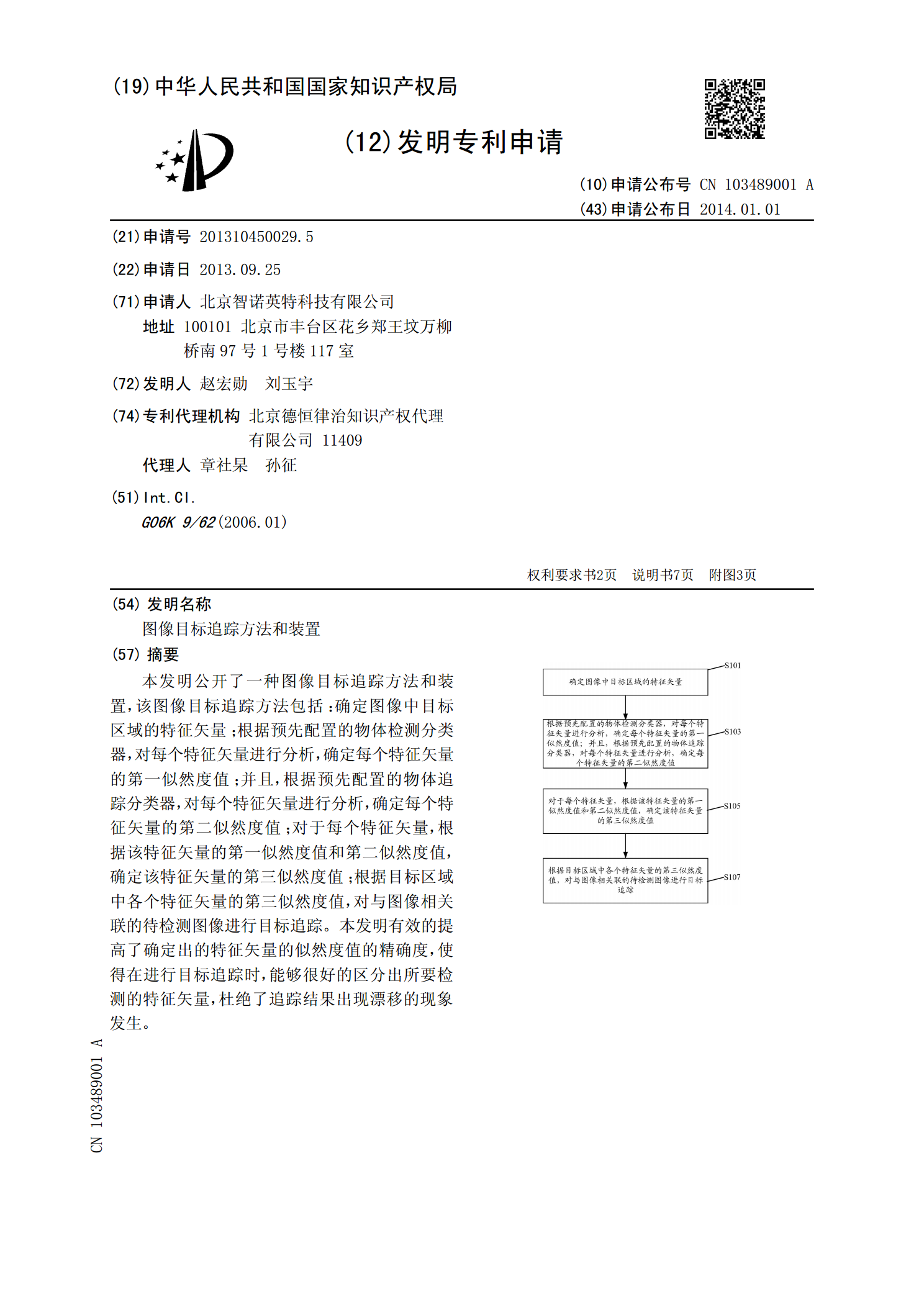
本发明公开了一种图像目标追踪方法和装置,该图像目标追踪方法包括:确定图像中目标区域的特征矢量;根据预先配置的物体检测分类器,对每个特征矢量进行分析,确定每个特征矢量的第一似然度值;并且,根据预先配置的物体追踪分类器,对每个特征矢量进行分析,确定每个特征矢量的第二似然度值;对于每个特征矢量,根据该特征矢量的第一似然度值和第二似然度值,确定该特征矢量的第三似然度值;根据目标区域中各个特征矢量的第三似然度值,对与图像相关联的待检测图像进行目标追踪。本发明有效的提高了确定出的特征矢量的似然度值的精确度,使得在进行

单目标追踪方法、装置及系统.pdf
本发明提供了一种单目标追踪方法、装置及系统,涉及计算机视觉技术领域,该方法应用于配置有追踪网络的设备;追踪网络包括主干网络、STN和相似性度量层;该方法包括:获取待追踪的帧图像和包含有目标对象的模板图像;通过主干网络提取模板图像的模板特征图和帧图像的第一特征图;通过STN对第一特征图进行特征偏移,得到第二特征图;通过相似性度量层计算模板特征图和第二特征图之间的第一相似性得分图,并基于第一相似性得分图在帧图像中确定目标对象的回归框。本发明能够有效提升目标对象的回归框的准确性和目标追踪的准确性。

一种场馆目标追踪方法、装置、设备及介质.pdf
本申请涉及一种场馆目标追踪方法、装置、设备及介质,应用于智能设备的技术领域,其方法包括:响应于用户的目标选中动作,获取选中目标的第一相关特征信息;利用广角摄像头采集广角图像;根据所述选中目标的第一相关特征信息,判断所述广角图像中是否包含所述选中目标;若是,则根据所述选中目标的第一相关特征信息,利用长焦摄像头对所述广角图像进行对焦,采集包含所述选中目标的对焦图像;若否,则生成提示信息,其中,所述提示信息用于提示用户改变所述广角摄像头的拍摄角度。本申请具有提高用户的观看体验的效果。