
一种四轨道龙门悬挂式双机械臂协同加工系统.pdf

努力****元恺

1/6
2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种四轨道龙门悬挂式双机械臂协同加工系统.pdf
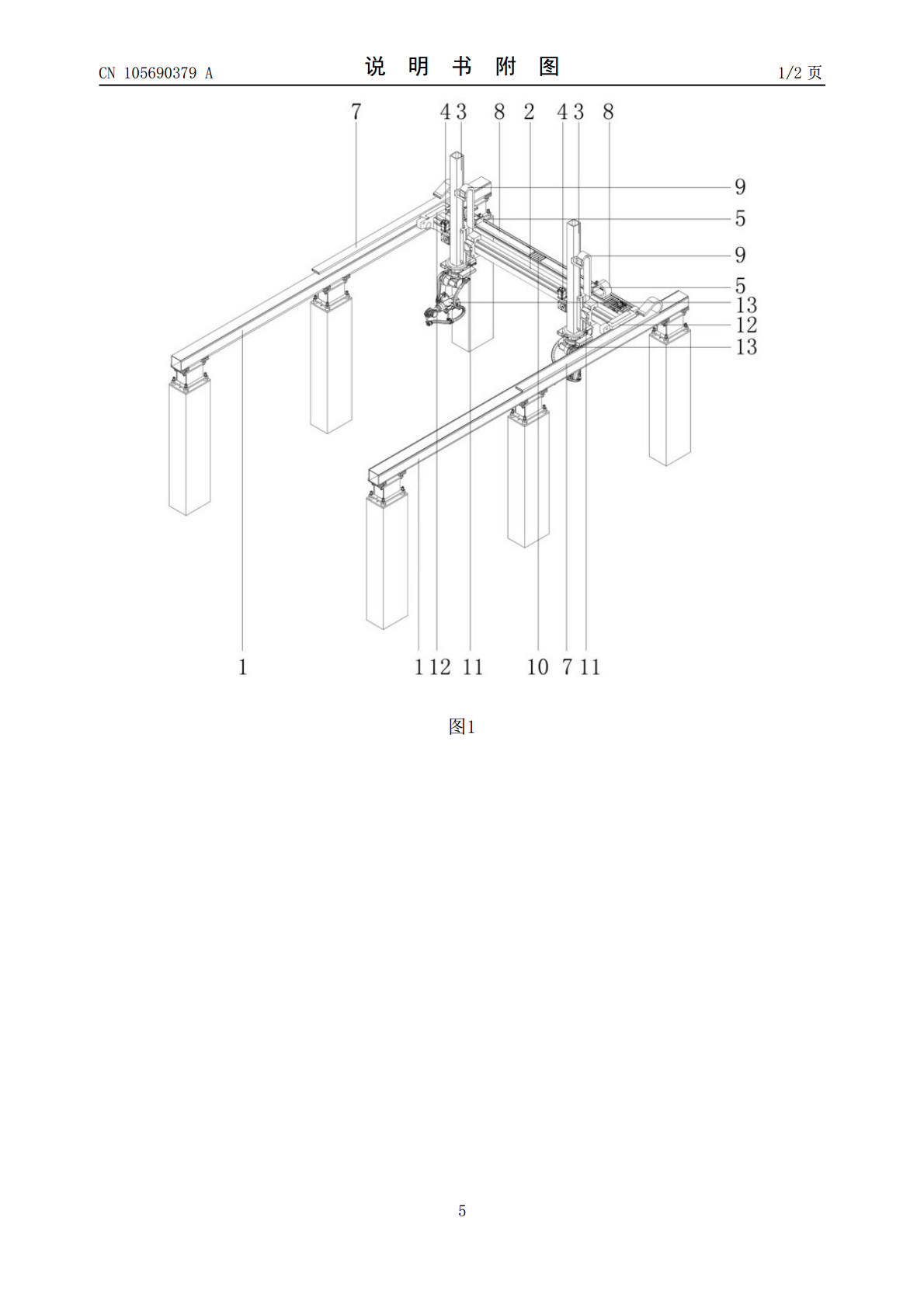
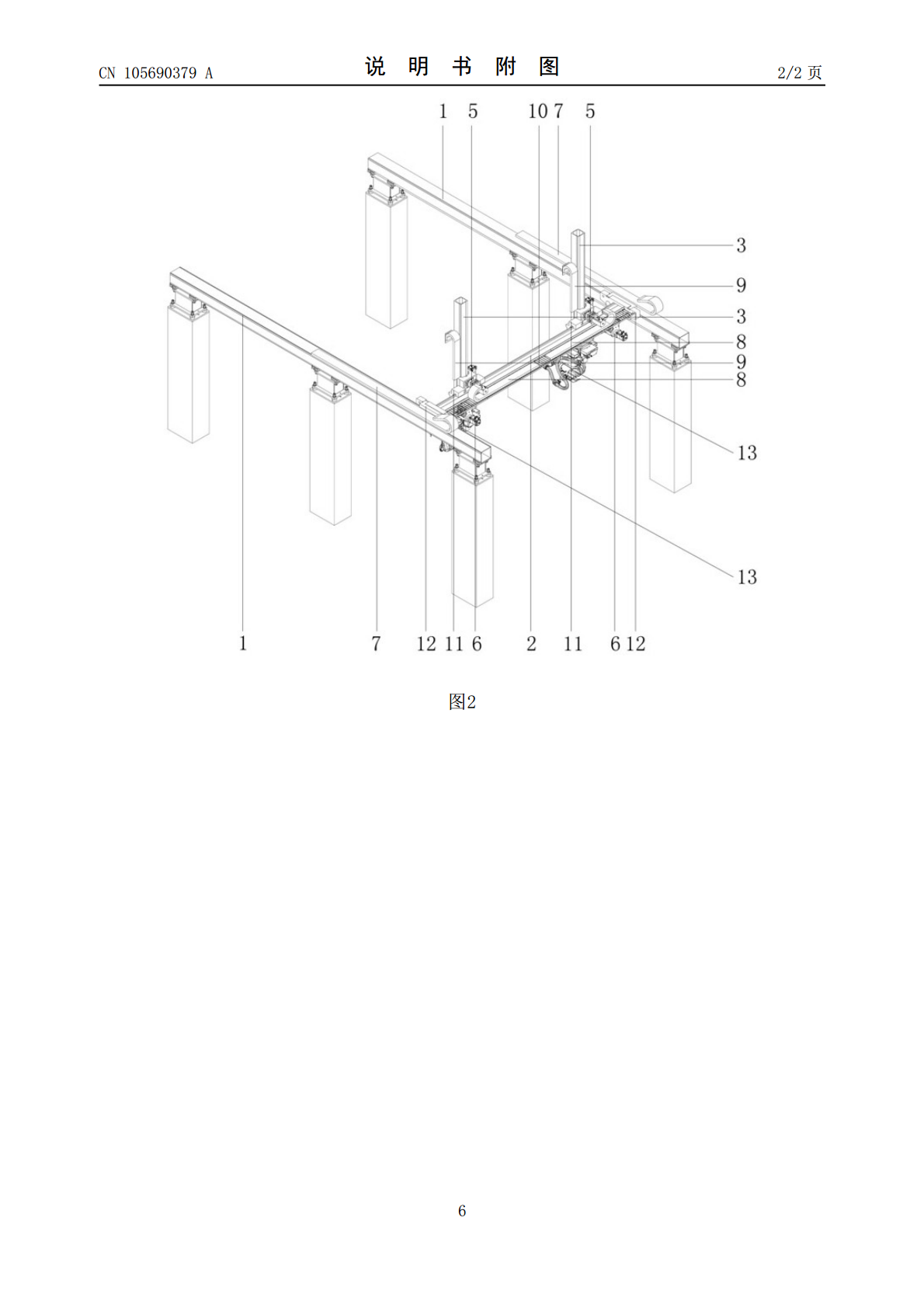
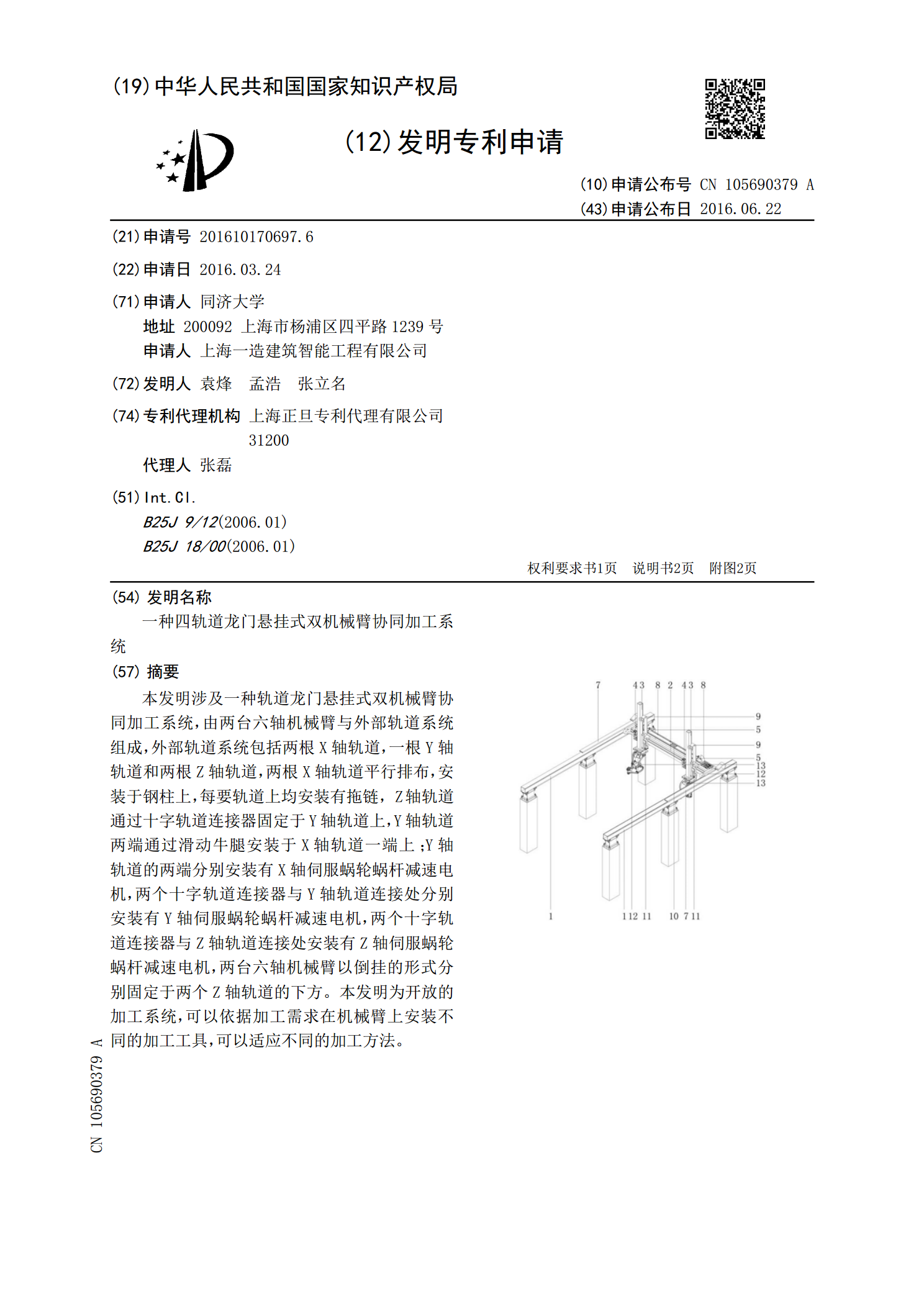
本发明涉及一种轨道龙门悬挂式双机械臂协同加工系统,由两台六轴机械臂与外部轨道系统组成,外部轨道系统包括两根X轴轨道,一根Y轴轨道和两根Z轴轨道,两根X轴轨道平行排布,安装于钢柱上,每要轨道上均安装有拖链,Z轴轨道通过十字轨道连接器固定于Y轴轨道上,Y轴轨道两端通过滑动牛腿安装于X轴轨道一端上;Y轴轨道的两端分别安装有X轴伺服蜗轮蜗杆减速电机,两个十字轨道连接器与Y轴轨道连接处分别安装有Y轴伺服蜗轮蜗杆减速电机,两个十字轨道连接器与Z轴轨道连接处安装有Z轴伺服蜗轮蜗杆减速电机,两台六轴机械臂以倒挂的形式分

车辆双横臂式独立悬挂系统.pdf
本发明公开了一种车辆双横臂式独立悬挂系统,包括前悬挂总成和后悬挂总成,前悬挂总成设有前横摆臂总成,前横摆臂总成包括前上横摆臂和前下横摆臂,后悬挂总成设有后横摆臂总成,后横摆臂总成包括后上横摆臂和后下横摆臂;本发明前上横摆臂和后上横摆臂分别在横向水平线上的投影尺寸小于前下横摆臂和后下横摆臂在横向水平线上的投影尺寸,提高了汽车的行驶稳定性、减小车身的倾斜和震动,横向刚度大;车轮在上下运动时能自动改变外倾角并且减小轮距变化,避免车轮侧向滑移,减少轮胎的磨损;并且也能自适应路面,轮胎接地面积大,贴地性好,能保证汽
一种悬挂式机械臂.pdf
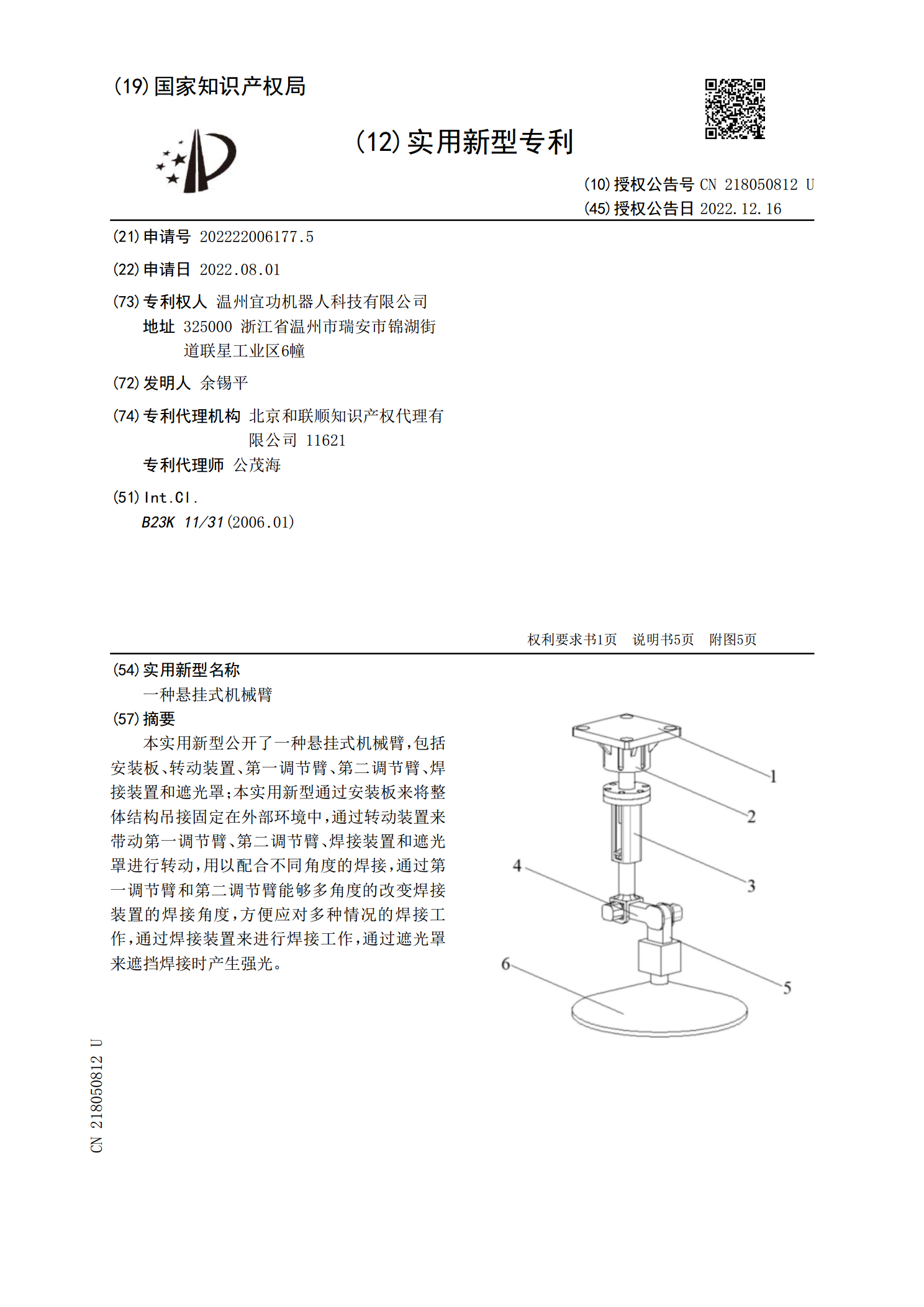
本实用新型公开了一种悬挂式机械臂,包括安装板、转动装置、第一调节臂、第二调节臂、焊接装置和遮光罩;本实用新型通过安装板来将整体结构吊接固定在外部环境中,通过转动装置来带动第一调节臂、第二调节臂、焊接装置和遮光罩进行转动,用以配合不同角度的焊接,通过第一调节臂和第二调节臂能够多角度的改变焊接装置的焊接角度,方便应对多种情况的焊接工作,通过焊接装置来进行焊接工作,通过遮光罩来遮挡焊接时产生强光。
一种悬挂式双驱换道系统及其轨道.pdf
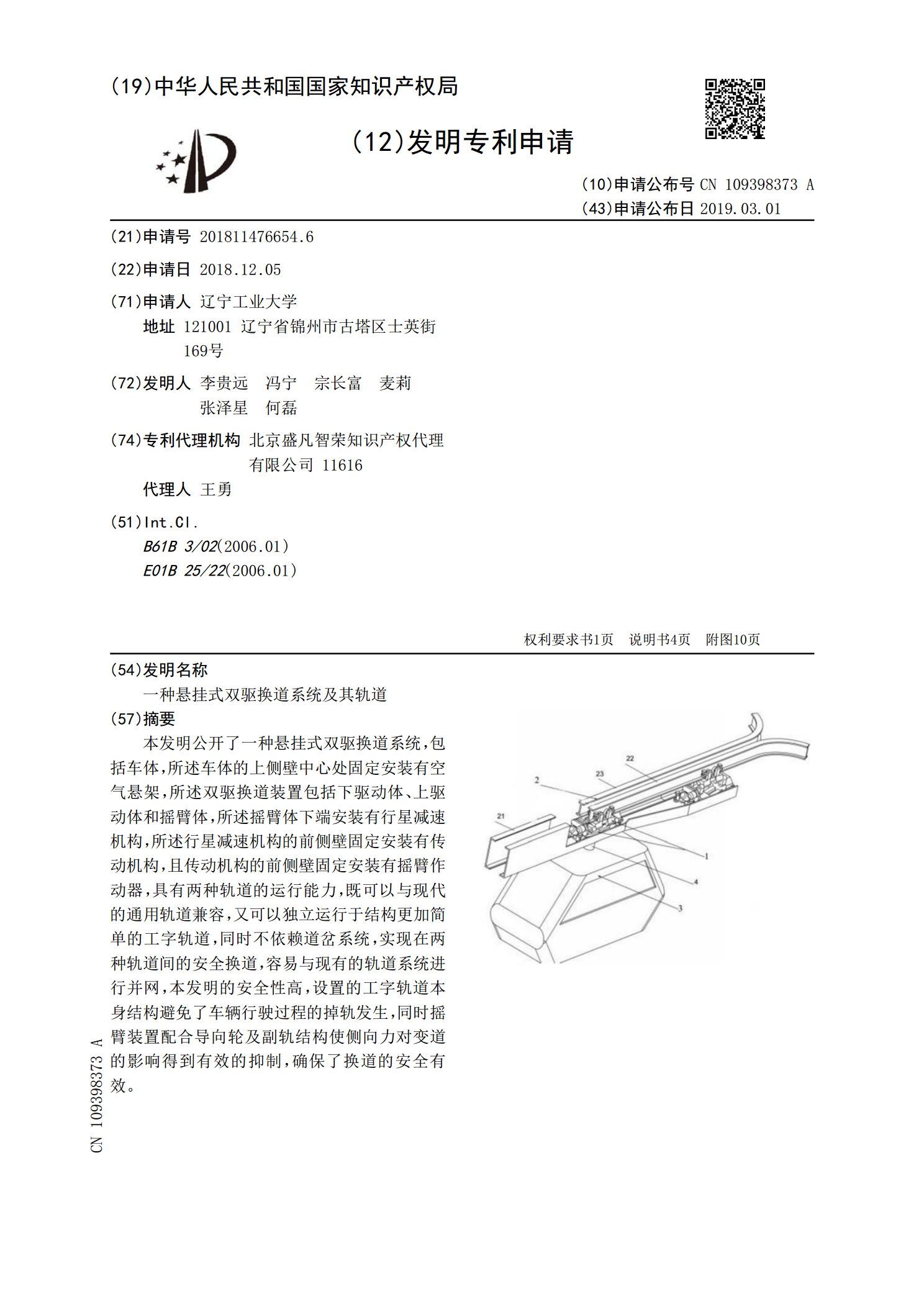
本发明公开了一种悬挂式双驱换道系统,包括车体,所述车体的上侧壁中心处固定安装有空气悬架,所述双驱换道装置包括下驱动体、上驱动体和摇臂体,所述摇臂体下端安装有行星减速机构,所述行星减速机构的前侧壁固定安装有传动机构,且传动机构的前侧壁固定安装有摇臂作动器,具有两种轨道的运行能力,既可以与现代的通用轨道兼容,又可以独立运行于结构更加简单的工字轨道,同时不依赖道岔系统,实现在两种轨道间的安全换道,容易与现有的轨道系统进行并网,本发明的安全性高,设置的工字轨道本身结构避免了车辆行驶过程的掉轨发生,同时摇臂装置配合

汽车悬挂系统之双叉臂式独立悬架.pdf
汽车悬挂系统之双叉臂式独立悬架从结构上来看,双叉臂式悬架和麦弗逊式悬架有着紧密的血缘关系,它们的共同点为:下控制臂都由一根V字形或A字形的叉形控制臂构成,液压减震器充当支柱支撑整个车身。不同处则在于双叉臂式悬架多了一根连接支柱减震器的上控制臂,这样一来有效增强了悬架整体的可靠性和稳定性。通用悍马H3的双叉臂前悬(能承受住越野时崎岖路面对底盘的强大冲击)其实双叉臂式悬架还有一个有趣的名字——双愿骨式悬架(Doublewishbone)。据说这个有趣的名字来源于西方圣诞节上人们喜欢吃的一种火鸡的骨头,当人们开