
一种浏览器防追踪方法及装置.pdf

Ro****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种浏览器防追踪方法及装置.pdf
本发明公开了一种浏览器防追踪方法及装置,通过依据预设配置参数,确定目标配置参数;利用所述目标配置参数,生成浏览器的交互环境;响应于接收到浏览器的运行请求,利用所述浏览器的交互环境对所述运行请求进行响应。实现了浏览器每次运行之前对参数进行配置,使得浏览器的交互环境每次都不同。避免了对浏览器的指纹信息的追踪,实现了对浏览器的防止追踪,进而保护用户在浏览器上的信息安全和隐私的目的。
安防追踪方法及装置.pdf
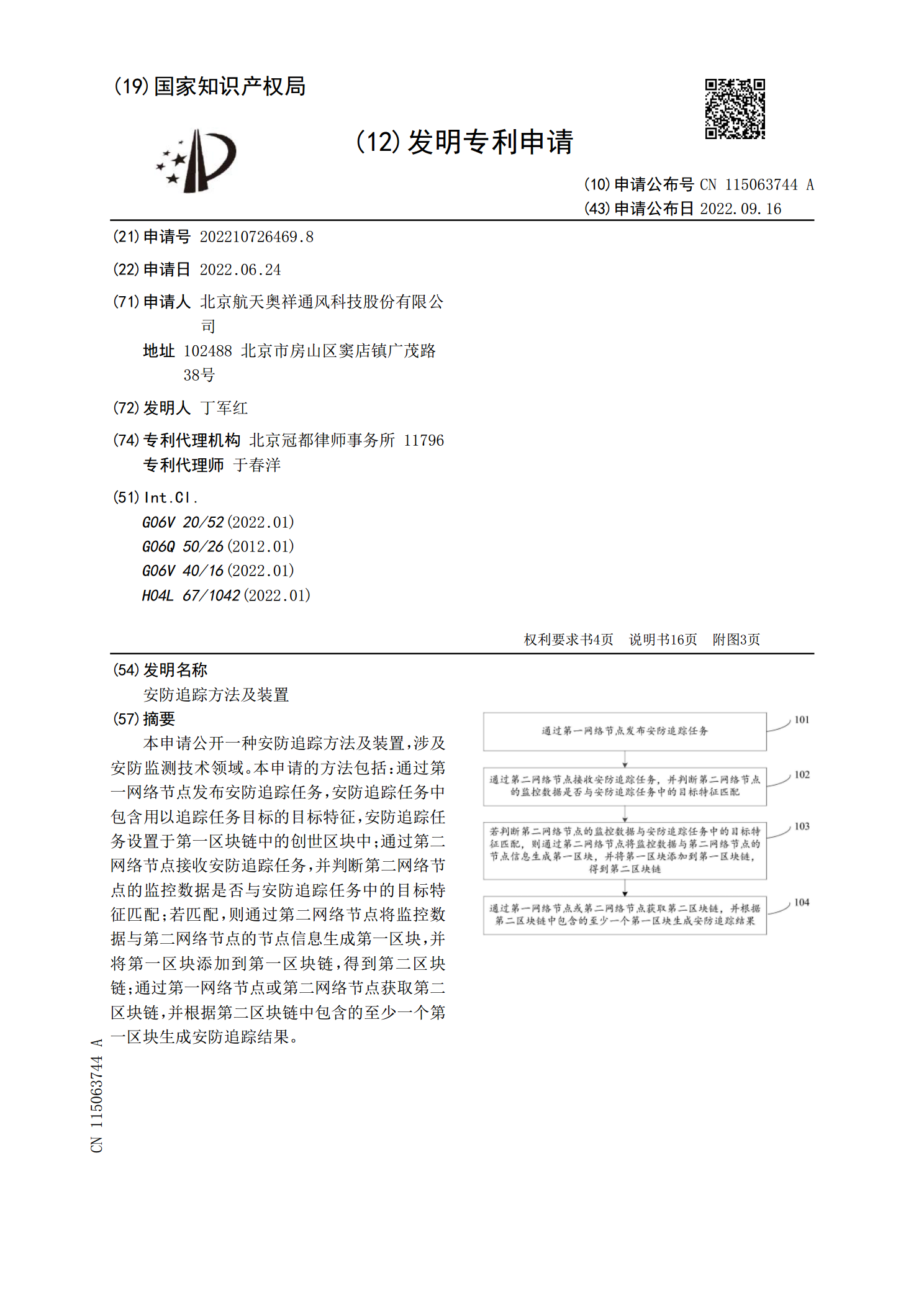
本申请公开一种安防追踪方法及装置,涉及安防监测技术领域。本申请的方法包括:通过第一网络节点发布安防追踪任务,安防追踪任务中包含用以追踪任务目标的目标特征,安防追踪任务设置于第一区块链中的创世区块中;通过第二网络节点接收安防追踪任务,并判断第二网络节点的监控数据是否与安防追踪任务中的目标特征匹配;若匹配,则通过第二网络节点将监控数据与第二网络节点的节点信息生成第一区块,并将第一区块添加到第一区块链,得到第二区块链;通过第一网络节点或第二网络节点获取第二区块链,并根据第二区块链中包含的至少一个第一区块生成安防
一种波束追踪方法及装置.pdf
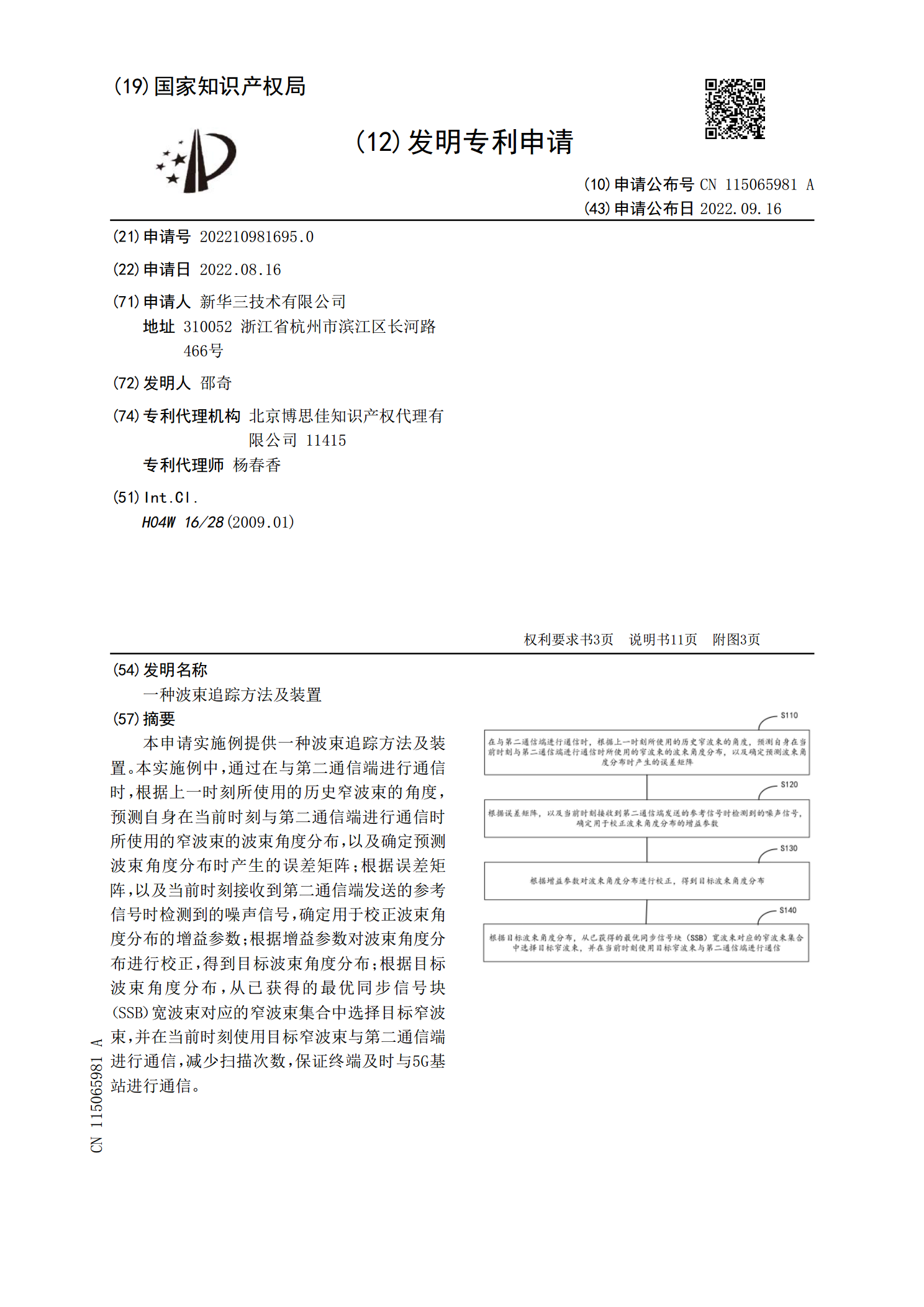
本申请实施例提供一种波束追踪方法及装置。本实施例中,通过在与第二通信端进行通信时,根据上一时刻所使用的历史窄波束的角度,预测自身在当前时刻与第二通信端进行通信时所使用的窄波束的波束角度分布,以及确定预测波束角度分布时产生的误差矩阵;根据误差矩阵,以及当前时刻接收到第二通信端发送的参考信号时检测到的噪声信号,确定用于校正波束角度分布的增益参数;根据增益参数对波束角度分布进行校正,得到目标波束角度分布;根据目标波束角度分布,从已获得的最优同步信号块(SSB)宽波束对应的窄波束集合中选择目标窄波束,并在当前时刻

一种机器人追踪方法及追踪装置.pdf
本发明公开了一种机器人追踪方法及追踪装置,图像采集模块与图像处理模块相连再连接至PLC控制器,定位模块、自动轨迹生成模块和红外避障传感模块与PLC控制器输入端相连,PLC控制器输出端与电机驱动模块、蜂鸣器和液晶显示模块相连,PLC控制器通过电机驱动模块驱动机器人行进,PLC控制器通过无线通信模块与远程终端双向通信。本发明提供的机器人追踪方法及追踪装置,在现有技术的机器人基础上进行改进,控制机器人自动模拟生成行进的轨迹曲线并避障行驶,通过图像采集并进行处理后传送至PLC控制器进行匹配处理,追踪所有目标工件的

一种目标追踪处理器、目标追踪方法及装置.pdf
本公开提供了一种目标追踪处理器、目标追踪方法及装置,其中,该目标追踪处理器包括:获取模块,用于获取与目标追踪指令对应的多帧目标图像,并将所述多帧目标图像传输至构建模块;构建模块,用于构建包含所述多帧目标图像对应的多个层级图像的图像金字塔;追踪模块,用于基于第N层追踪模块在第N层层级图像上进行光流追踪,并在完成光流追踪之后,将追踪结果输入至第N‑1层追踪模块,以使所述第N‑1层追踪模块基于所述追踪结果在第N‑1层层级图像上进行光流追踪。