
一种波束追踪方法及装置.pdf

灵慧****89

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种波束追踪方法及装置.pdf
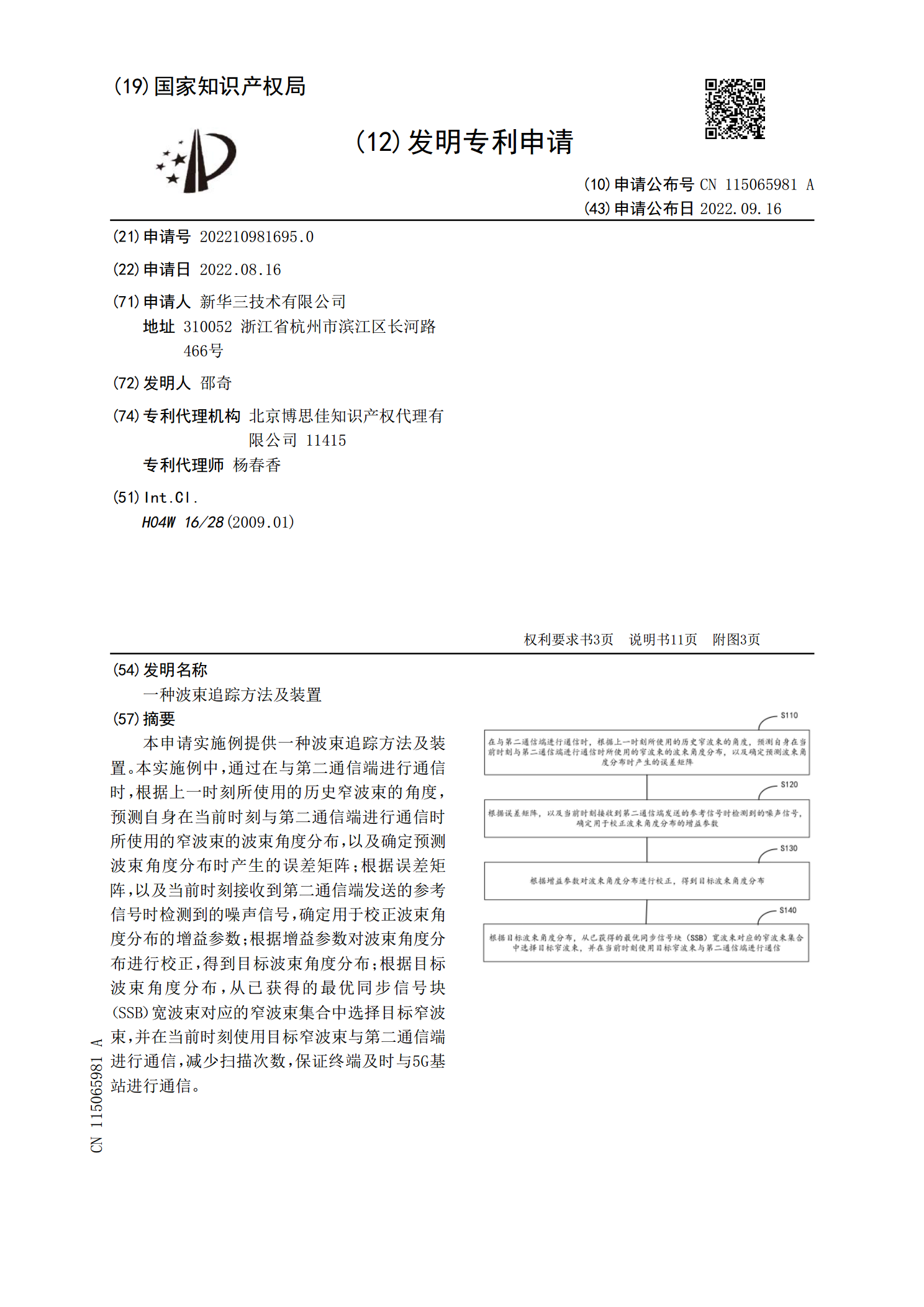
本申请实施例提供一种波束追踪方法及装置。本实施例中,通过在与第二通信端进行通信时,根据上一时刻所使用的历史窄波束的角度,预测自身在当前时刻与第二通信端进行通信时所使用的窄波束的波束角度分布,以及确定预测波束角度分布时产生的误差矩阵;根据误差矩阵,以及当前时刻接收到第二通信端发送的参考信号时检测到的噪声信号,确定用于校正波束角度分布的增益参数;根据增益参数对波束角度分布进行校正,得到目标波束角度分布;根据目标波束角度分布,从已获得的最优同步信号块(SSB)宽波束对应的窄波束集合中选择目标窄波束,并在当前时刻
一种基于射线追踪判定太赫兹波束质量的方法及装置.pdf
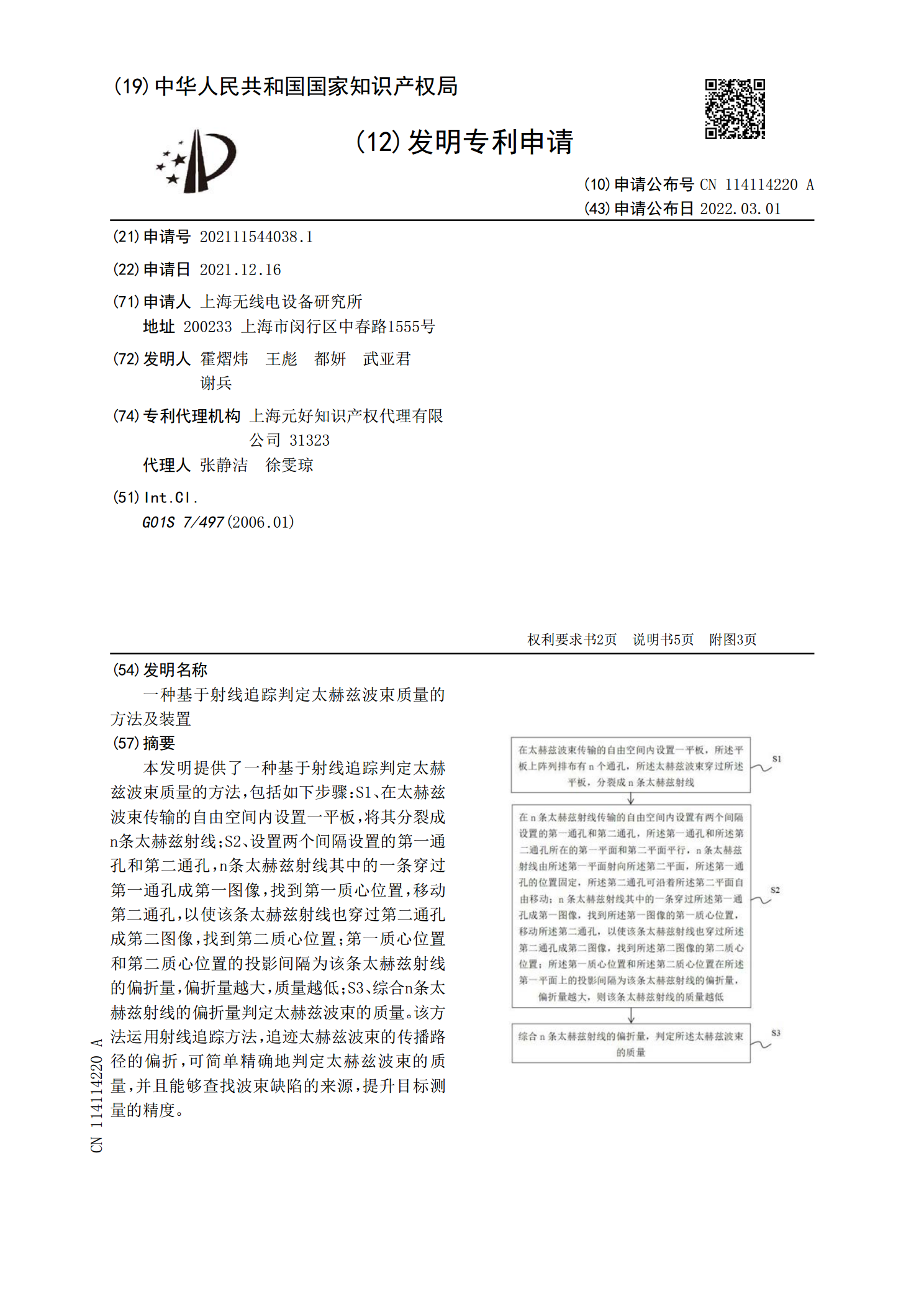
本发明提供了一种基于射线追踪判定太赫兹波束质量的方法,包括如下步骤:S1、在太赫兹波束传输的自由空间内设置一平板,将其分裂成n条太赫兹射线;S2、设置两个间隔设置的第一通孔和第二通孔,n条太赫兹射线其中的一条穿过第一通孔成第一图像,找到第一质心位置,移动第二通孔,以使该条太赫兹射线也穿过第二通孔成第二图像,找到第二质心位置;第一质心位置和第二质心位置的投影间隔为该条太赫兹射线的偏折量,偏折量越大,质量越低;S3、综合n条太赫兹射线的偏折量判定太赫兹波束的质量。该方法运用射线追踪方法,追迹太赫兹波束的传播路
基于波束形成的系统中的波束追踪和波束反馈操作的系统、方法和装置.pdf
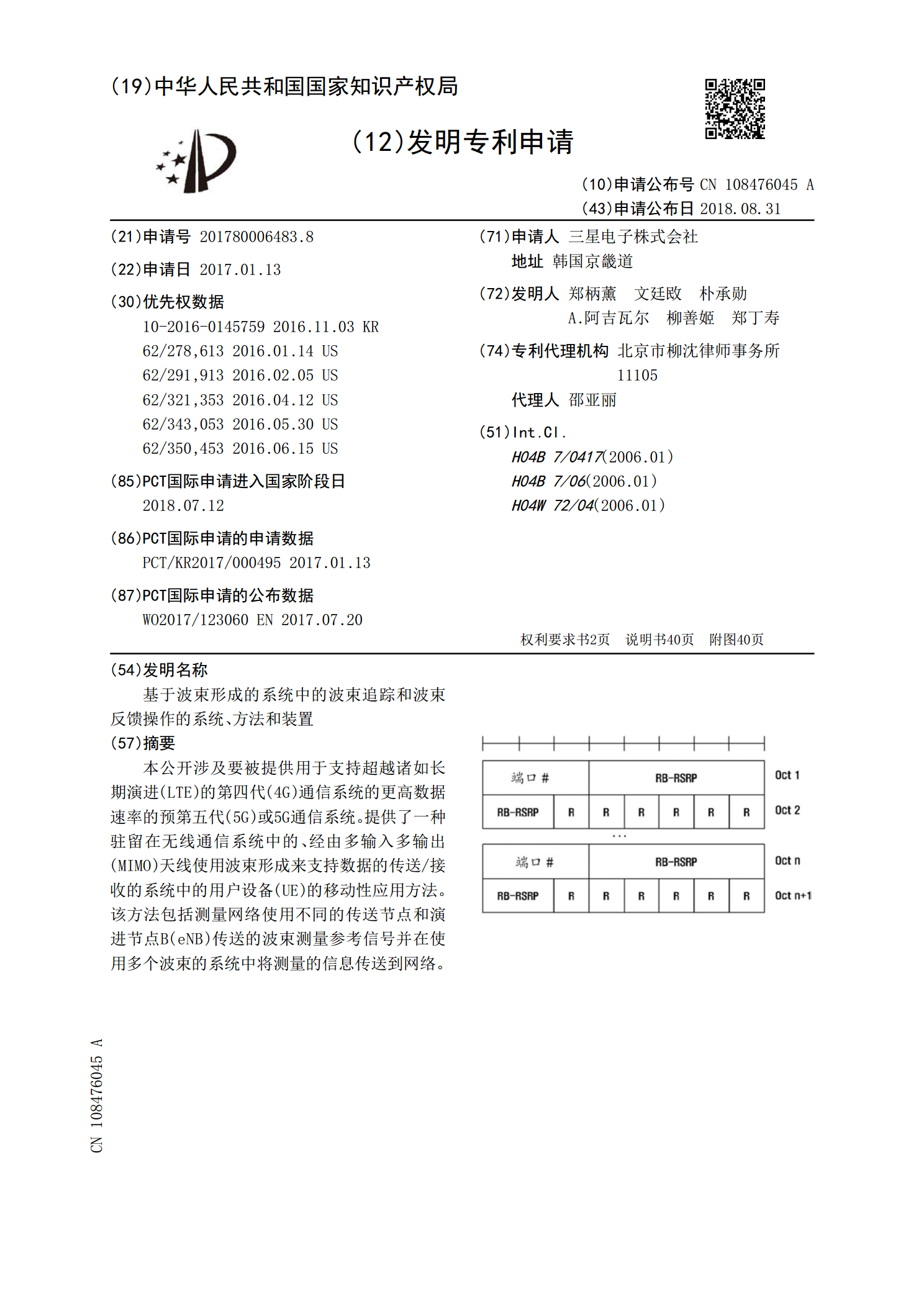
本公开涉及要被提供用于支持超越诸如长期演进(LTE)的第四代(4G)通信系统的更高数据速率的预第五代(5G)或5G通信系统。提供了一种驻留在无线通信系统中的、经由多输入多输出(MIMO)天线使用波束形成来支持数据的传送/接收的系统中的用户设备(UE)的移动性应用方法。该方法包括测量网络使用不同的传送节点和演进节点B(eNB)传送的波束测量参考信号并在使用多个波束的系统中将测量的信息传送到网络。
一种波束指示方法及装置.pdf
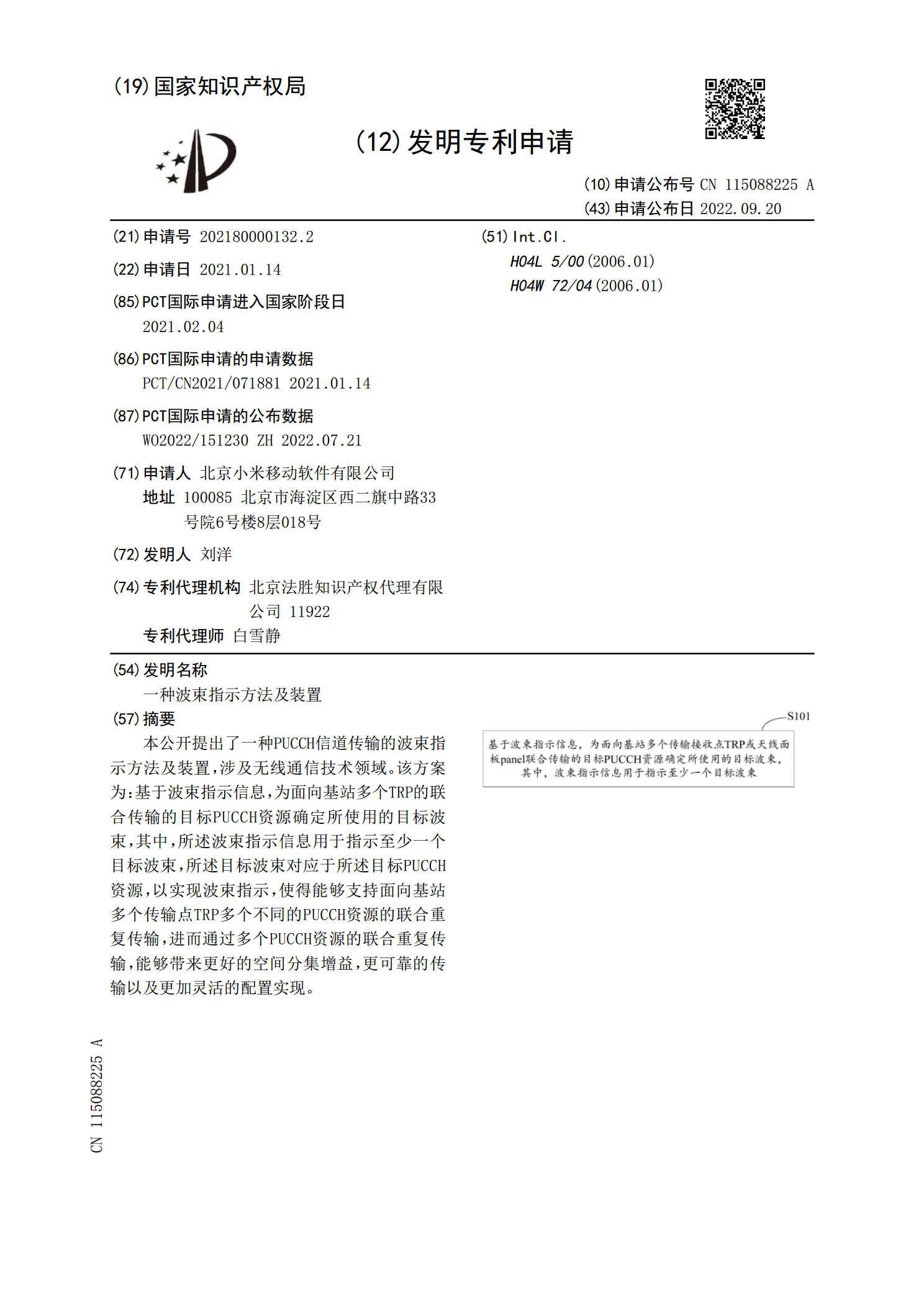
本公开提出了一种PUCCH信道传输的波束指示方法及装置,涉及无线通信技术领域。该方案为:基于波束指示信息,为面向基站多个TRP的联合传输的目标PUCCH资源确定所使用的目标波束,其中,所述波束指示信息用于指示至少一个目标波束,所述目标波束对应于所述目标PUCCH资源,以实现波束指示,使得能够支持面向基站多个传输点TRP多个不同的PUCCH资源的联合重复传输,进而通过多个PUCCH资源的联合重复传输,能够带来更好的空间分集增益,更可靠的传输以及更加灵活的配置实现。

一种波束调整方法及装置.pdf
一种波束调整方法,该波束调整方法包括:接入点发送波束调整协议BRP帧,BRP帧后面附带多个以不同发送波束发送的发送训练域,以使接收BRP帧的多个站点接收并测量不同发送波束发送的发送训练域的接收信号质量;接入点向多个站点中的每个站点发送轮询帧,轮询帧用于获取该站点对接收信号质量的测量结果;接入点根据每个站点返回的测量结果获取该站点接收信号质量最优的目标发送训练域所对应的目标发送波束,并将目标发送波束确定为接入点向所述站点发送数据的最优发送波束。采用本发明可以通过发送一次BRP帧调整接入点对于多个站点的最优发