
一种机器人电极帽自动整形装置.pdf

俊凤****bb

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人电极帽自动整形装置.pdf
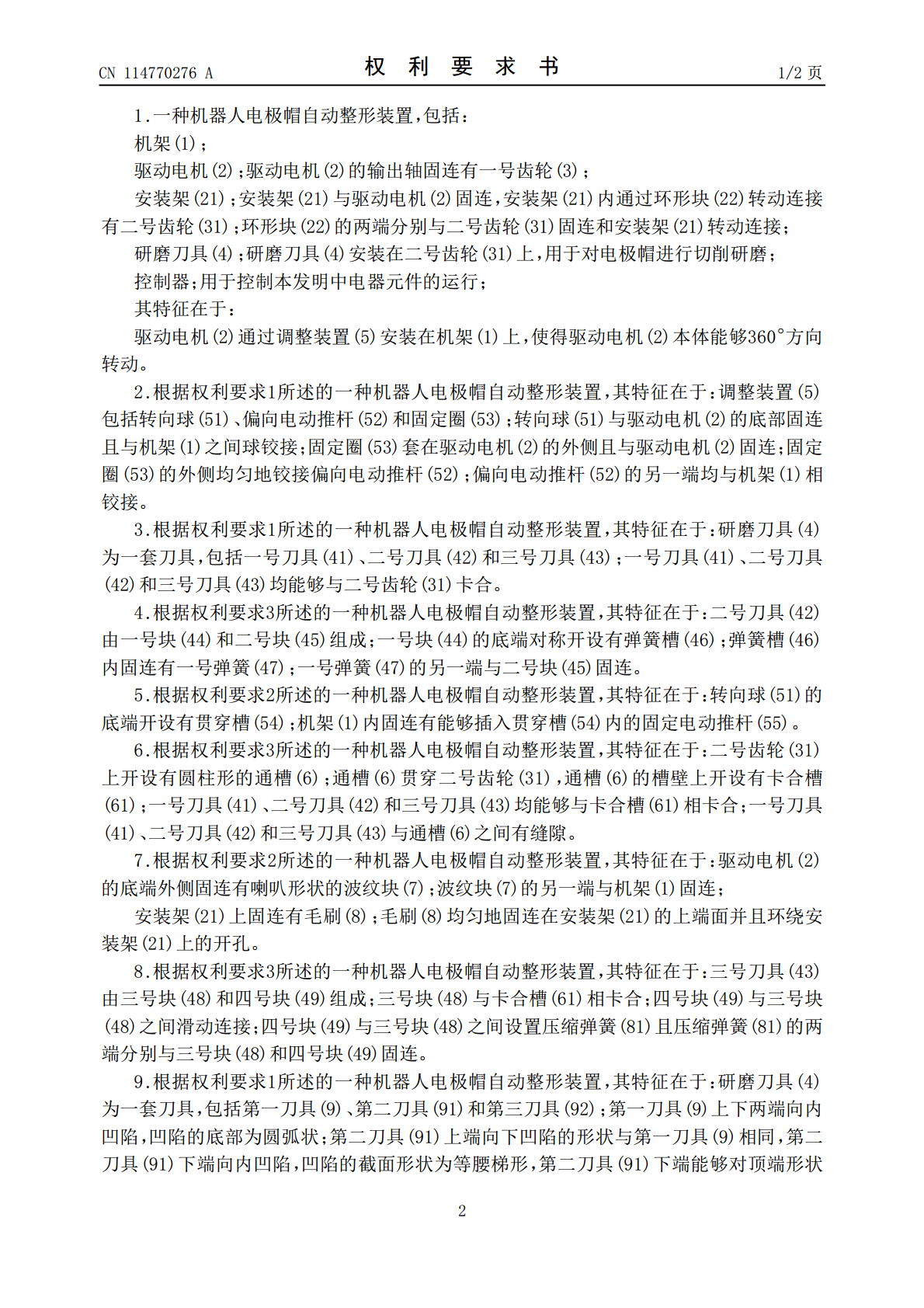
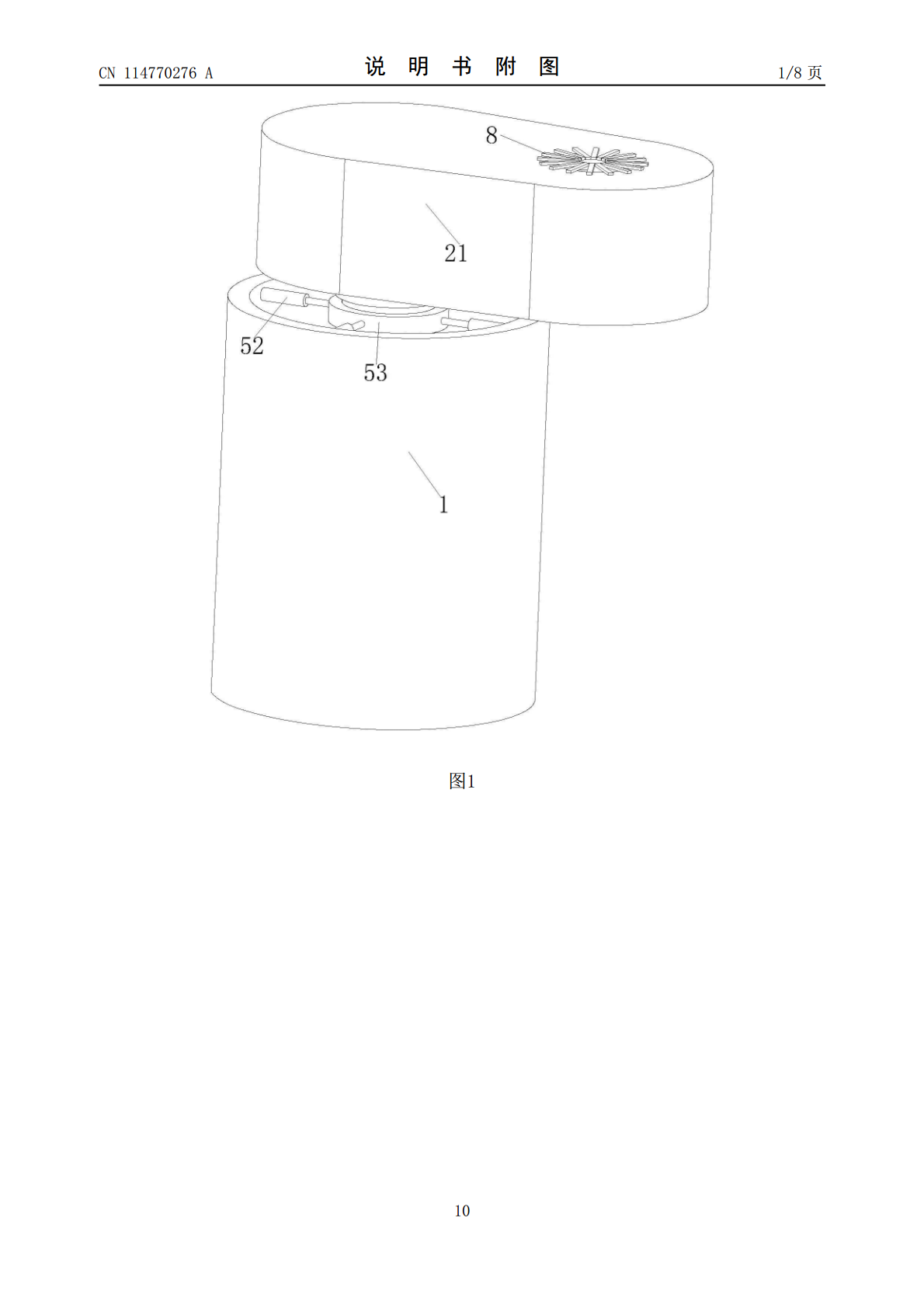
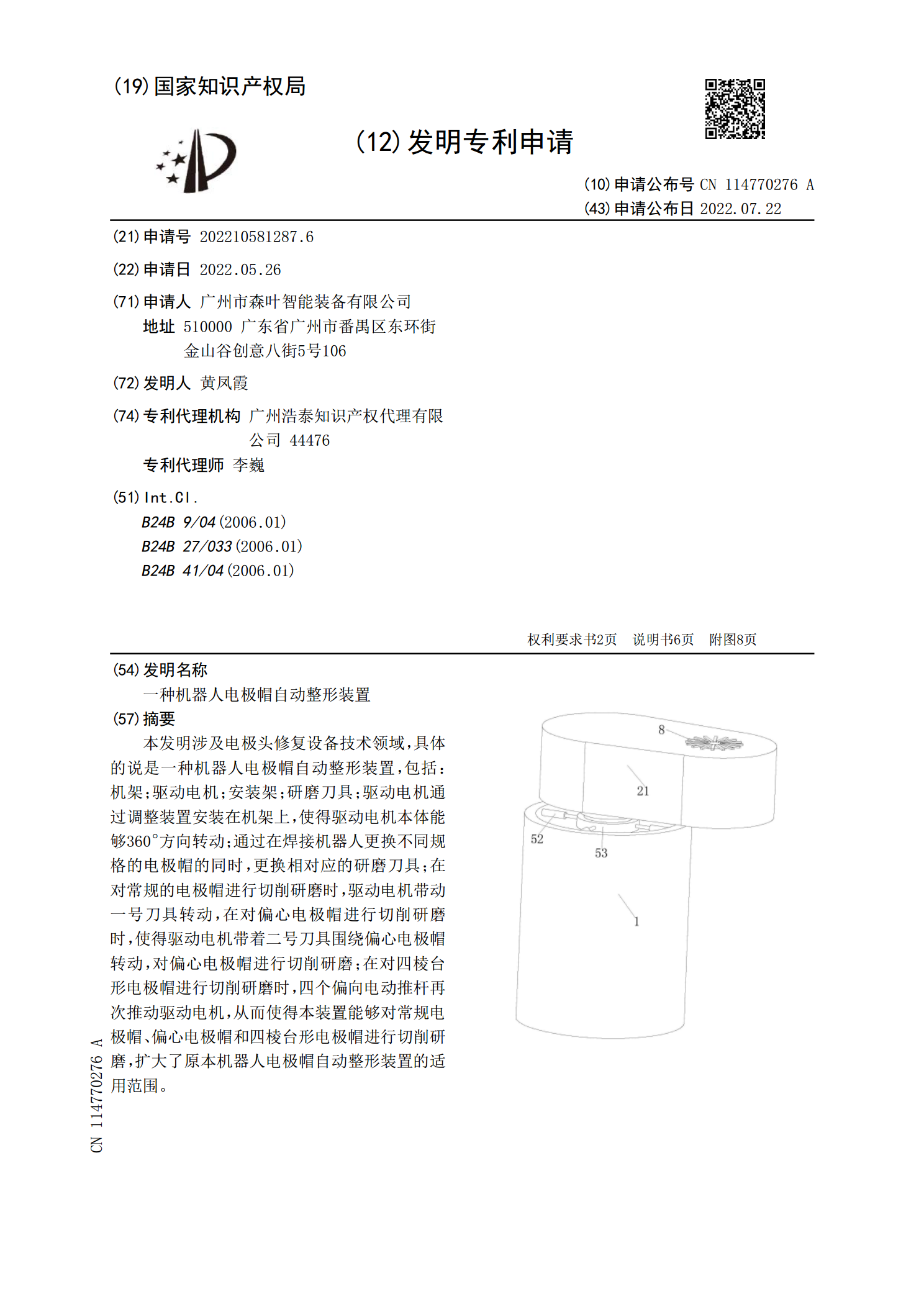
本发明涉及电极头修复设备技术领域,具体的说是一种机器人电极帽自动整形装置,包括:机架;驱动电机;安装架;研磨刀具;驱动电机通过调整装置安装在机架上,使得驱动电机本体能够360°方向转动;通过在焊接机器人更换不同规格的电极帽的同时,更换相对应的研磨刀具;在对常规的电极帽进行切削研磨时,驱动电机带动一号刀具转动,在对偏心电极帽进行切削研磨时,使得驱动电机带着二号刀具围绕偏心电极帽转动,对偏心电极帽进行切削研磨;在对四棱台形电极帽进行切削研磨时,四个偏向电动推杆再次推动驱动电机,从而使得本装置能够对常规电极帽、
一种电极帽自动拆卸装置.pdf
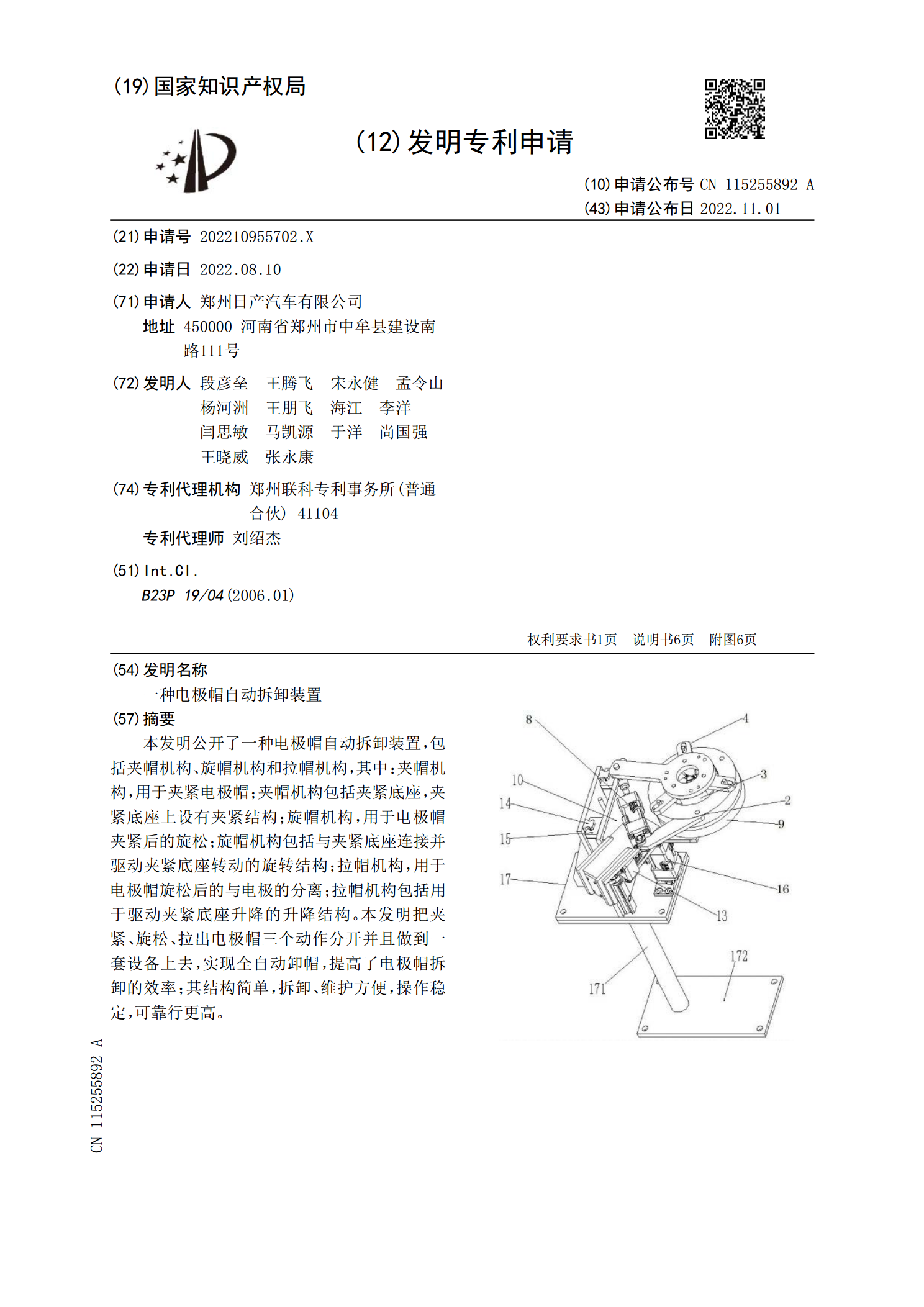
本发明公开了一种电极帽自动拆卸装置,包括夹帽机构、旋帽机构和拉帽机构,其中:夹帽机构,用于夹紧电极帽;夹帽机构包括夹紧底座,夹紧底座上设有夹紧结构;旋帽机构,用于电极帽夹紧后的旋松;旋帽机构包括与夹紧底座连接并驱动夹紧底座转动的旋转结构;拉帽机构,用于电极帽旋松后的与电极的分离;拉帽机构包括用于驱动夹紧底座升降的升降结构。本发明把夹紧、旋松、拉出电极帽三个动作分开并且做到一套设备上去,实现全自动卸帽,提高了电极帽拆卸的效率;其结构简单,拆卸、维护方便,操作稳定,可靠行更高。
一种电极帽修磨整形刀具.pdf
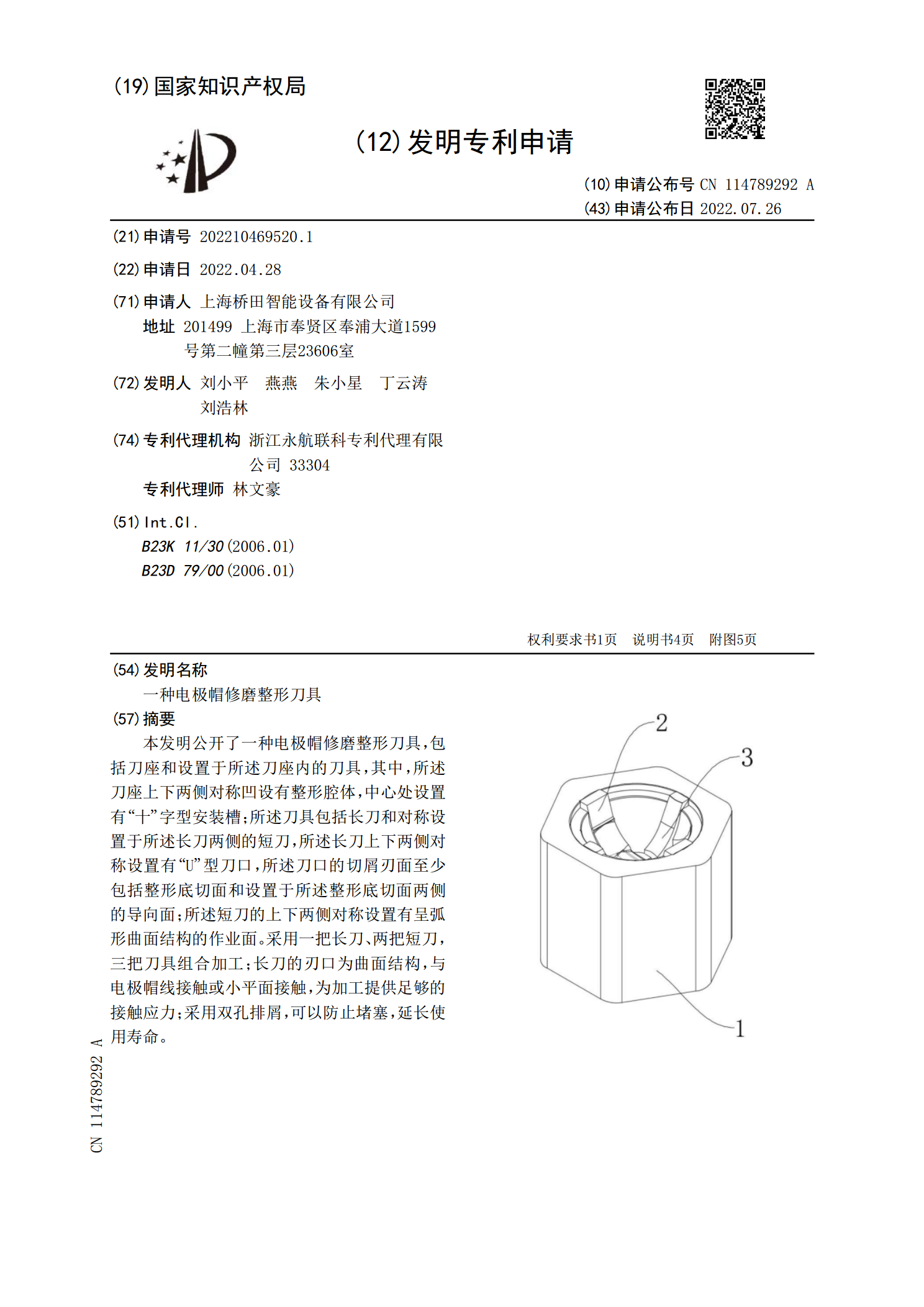
本发明公开了一种电极帽修磨整形刀具,包括刀座和设置于所述刀座内的刀具,其中,所述刀座上下两侧对称凹设有整形腔体,中心处设置有“十”字型安装槽;所述刀具包括长刀和对称设置于所述长刀两侧的短刀,所述长刀上下两侧对称设置有“U”型刀口,所述刀口的切屑刃面至少包括整形底切面和设置于所述整形底切面两侧的导向面;所述短刀的上下两侧对称设置有呈弧形曲面结构的作业面。采用一把长刀、两把短刀,三把刀具组合加工;长刀的刃口为曲面结构,与电极帽线接触或小平面接触,为加工提供足够的接触应力;采用双孔排屑,可以防止堵塞,延长使用寿
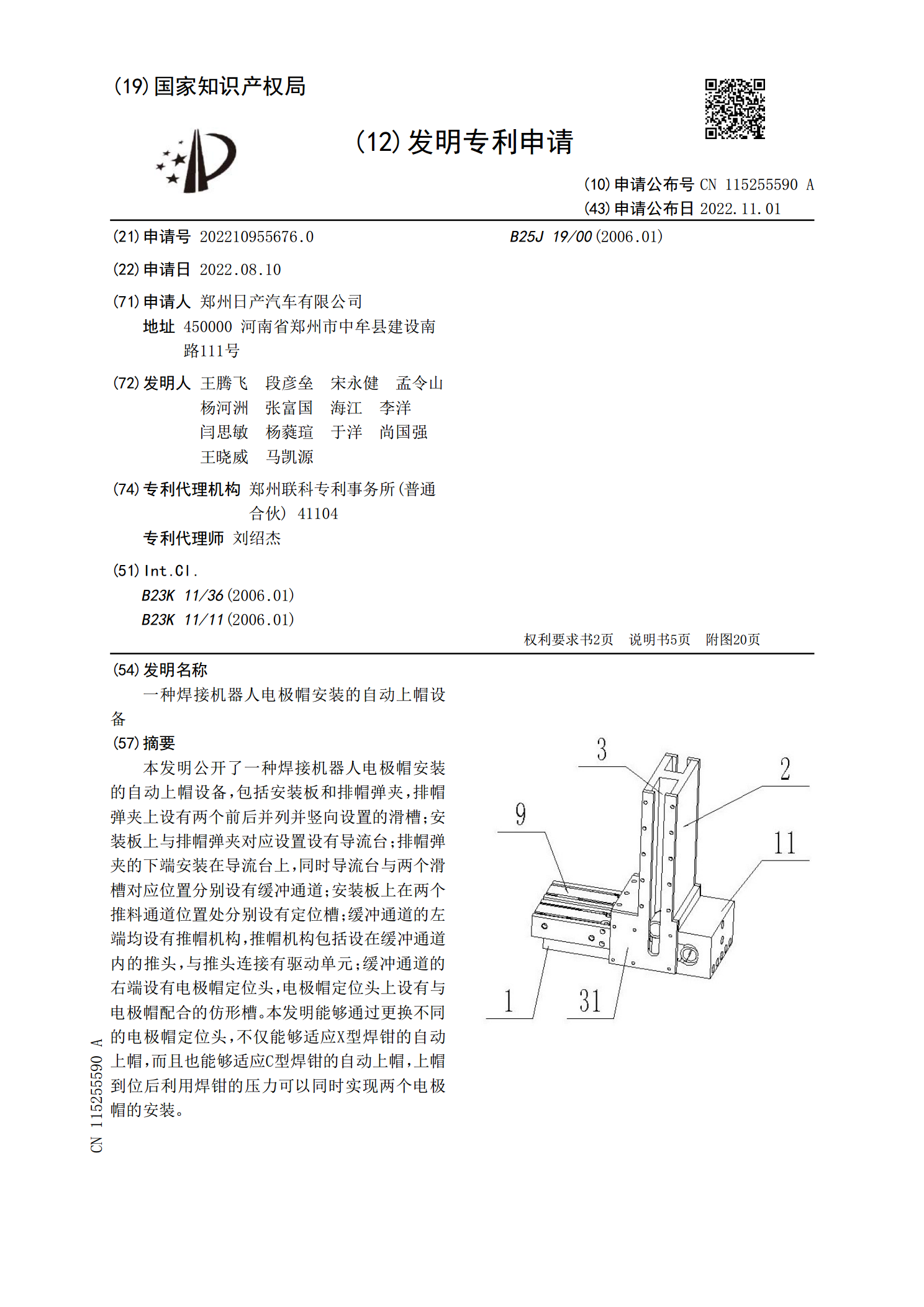
一种焊接机器人电极帽安装的自动上帽设备.pdf
本发明公开了一种焊接机器人电极帽安装的自动上帽设备,包括安装板和排帽弹夹,排帽弹夹上设有两个前后并列并竖向设置的滑槽;安装板上与排帽弹夹对应设置设有导流台;排帽弹夹的下端安装在导流台上,同时导流台与两个滑槽对应位置分别设有缓冲通道;安装板上在两个推料通道位置处分别设有定位槽;缓冲通道的左端均设有推帽机构,推帽机构包括设在缓冲通道内的推头,与推头连接有驱动单元;缓冲通道的右端设有电极帽定位头,电极帽定位头上设有与电极帽配合的仿形槽。本发明能够通过更换不同的电极帽定位头,不仅能够适应X型焊钳的自动上帽,而且也
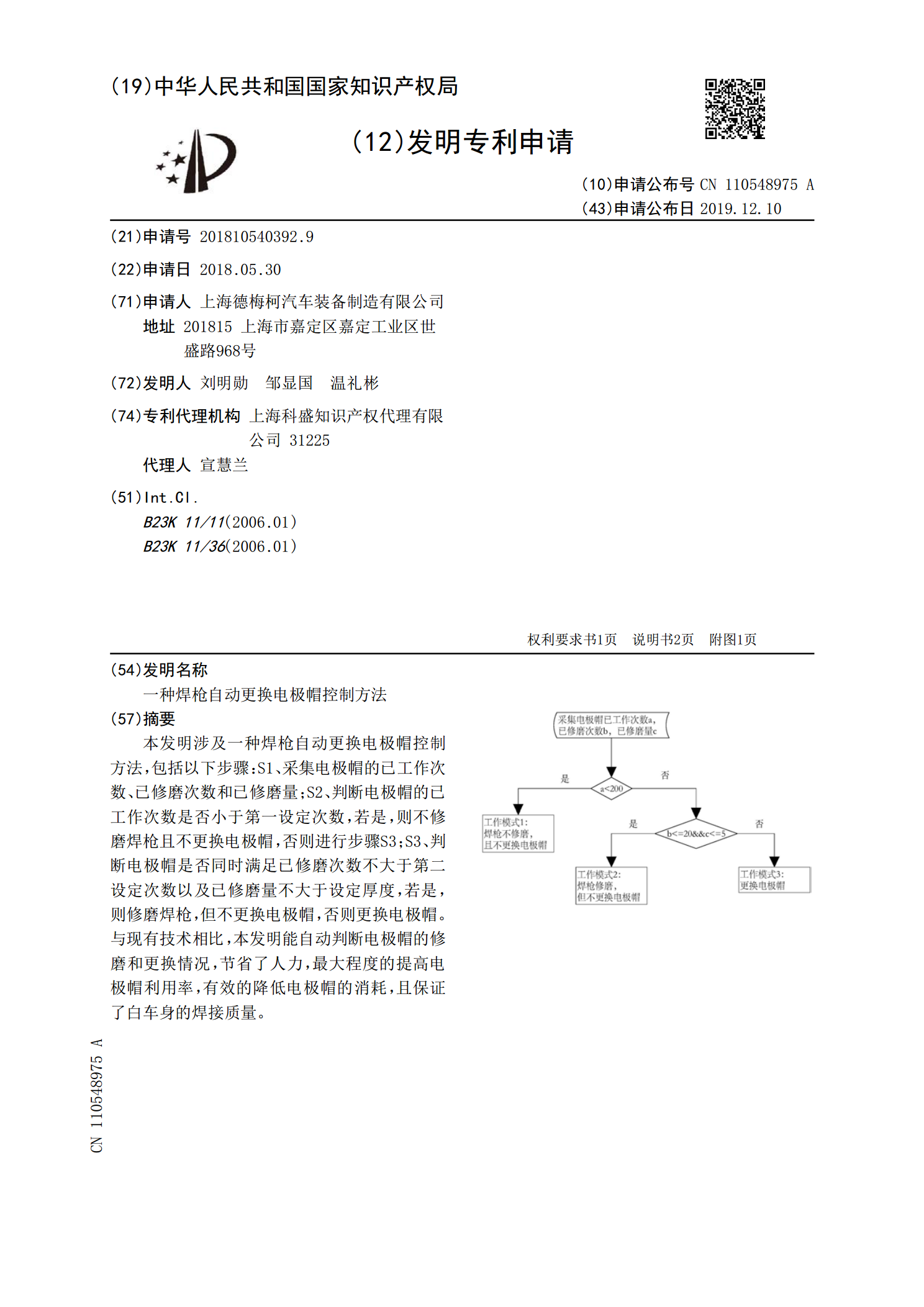
一种焊枪自动更换电极帽控制方法.pdf
本发明涉及一种焊枪自动更换电极帽控制方法,包括以下步骤:S1、采集电极帽的已工作次数、已修磨次数和已修磨量;S2、判断电极帽的已工作次数是否小于第一设定次数,若是,则不修磨焊枪且不更换电极帽,否则进行步骤S3;S3、判断电极帽是否同时满足已修磨次数不大于第二设定次数以及已修磨量不大于设定厚度,若是,则修磨焊枪,但不更换电极帽,否则更换电极帽。与现有技术相比,本发明能自动判断电极帽的修磨和更换情况,节省了人力,最大程度的提高电极帽利用率,有效的降低电极帽的消耗,且保证了白车身的焊接质量。