
水下矢量推进螺旋桨装置设计与研究.docx

18****28


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

水下矢量推进螺旋桨装置设计与研究.docx
水下矢量推进螺旋桨装置设计与研究一、内容概述随着海洋工程和船舶工业的快速发展,水下矢量推进技术在船舶动力系统中的应用越来越广泛。水下矢量推进螺旋桨装置作为一种高效、低噪音、低排放的推进方式,已经成为船舶设计领域的研究热点。本文旨在对水下矢量推进螺旋桨装置的设计与研究进行全面、深入的探讨,以期为我国船舶工业的发展提供有益的理论指导和技术支撑。本文首先介绍了水下矢量推进技术的原理及其优势,分析了水下矢量推进螺旋桨装置的设计要求和关键技术。在此基础上,针对现有的水下矢量推进螺旋桨装置存在的问题,提出了一种新型的
水下螺旋桨推进装置.pdf
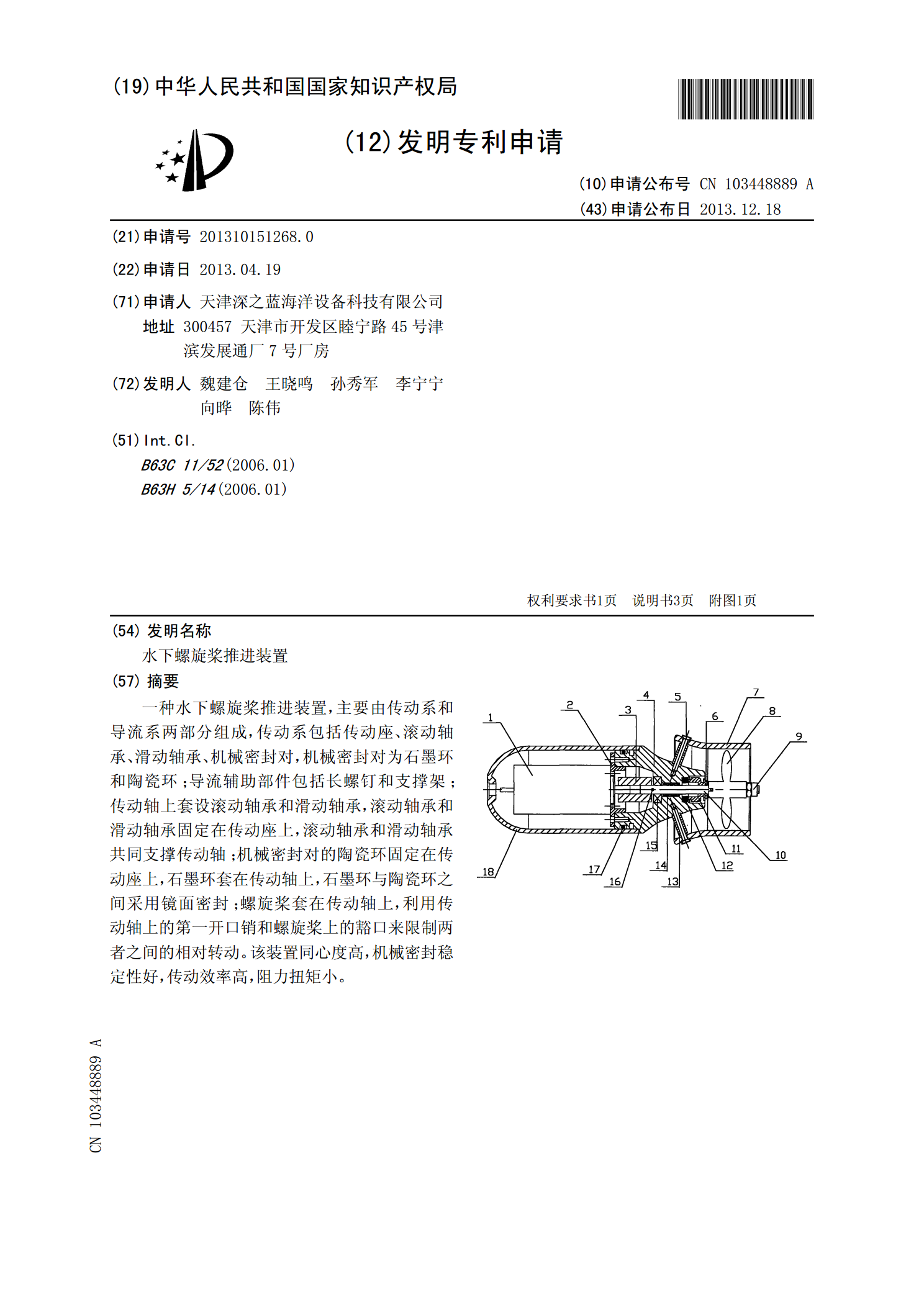
一种水下螺旋桨推进装置,主要由传动系和导流系两部分组成,传动系包括传动座、滚动轴承、滑动轴承、机械密封对,机械密封对为石墨环和陶瓷环;导流辅助部件包括长螺钉和支撑架;传动轴上套设滚动轴承和滑动轴承,滚动轴承和滑动轴承固定在传动座上,滚动轴承和滑动轴承共同支撑传动轴;机械密封对的陶瓷环固定在传动座上,石墨环套在传动轴上,石墨环与陶瓷环之间采用镜面密封;螺旋桨套在传动轴上,利用传动轴上的第一开口销和螺旋桨上的豁口来限制两者之间的相对转动。该装置同心度高,机械密封稳定性好,传动效率高,阻力扭矩小。

基于球齿轮机构的全方位主动矢量推进水下螺旋桨装置.pdf
一种基于球齿轮机构的全方位主动矢量推进水下螺旋桨装置,它包括螺旋桨、柔性轴及驱动机构,柔性轴包括两对以上依次串联的球齿轮,每对球齿轮中的阳极球齿轮通过圆柱面配合连接于一级万向节上,相邻两对球齿轮中的阴极球齿轮一同通过圆柱面配合连接于二级万向节上,位于柔性轴最前端的阳极球齿轮与螺旋桨相连,位于柔性轴最末端的阳极球齿轮与驱动机构相连,每对球齿轮中的阳极球齿轮和阴极球齿轮相互啮合形成行星齿轮机构;与位于柔性轴最末端阳极球齿轮连接的一级万向节与十字推力环相连,十字推力环与驱动机构相连,驱动机构包括两个双

一种螺旋桨矢量推进装置.pdf
本发明公开了螺旋桨矢量推进装置,包括螺旋桨旋转运动传递机构、螺旋桨偏摆机构以及内密封舱整体回转机构,螺旋桨旋转运动传递机构由U运动副、P运动副和S运动副构成的UPS运动支链,将安装于内密封舱的推进电机的旋转运动传递给螺旋桨;螺旋桨偏摆机构由滚珠丝杠和工字导轨组成的移动副组成,安装于内密封舱内,它通过丝杠运动使得螺旋桨绕密封舱中心轴线发生偏摆运动;内密封舱整体回转机构主要由一对内啮合齿轮副构成,通过内啮合齿轮的转动驱动内密封舱相对于外密封舱360°范围内的回转。本发明通过螺旋桨偏摆和内密封舱整体回转两条独立

水下机器人全部偏转螺旋桨矢量推进装置的动力学建模与实验研究的任务书.docx
水下机器人全部偏转螺旋桨矢量推进装置的动力学建模与实验研究的任务书任务书任务名称:水下机器人全部偏转螺旋桨矢量推进装置的动力学建模与实验研究任务目的:本任务旨在研究水下机器人的偏转螺旋桨矢量推进装置,在动力学建模和实验研究方面进行探索,以提高水下机器人的操控性和功能性。任务内容:1.研究水下机器人的偏转螺旋桨矢量推进装置的工作原理,探究其在水下环境中的运动特性和操控性能。2.对水下机器人的偏转螺旋桨矢量推进装置进行动力学建模,包括力学和控制系统模型,建立相应的数学模型。3.设计并搭建水下机器人偏转螺旋桨矢