
回转式给袋包装机取袋上袋机构的设计及优化.pdf

文库****品店

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
回转式给袋包装机取袋上袋机构的设计及优化.pdf
回转式给袋包装机取袋上袋机构的设计及优化摘要:当前,给袋包装机已经成为了食品和化妆品行业的主要包装设备。回转式给袋包装机作为其中一种重要的类型,其性能和效率已经得到了广泛的认可,但是其取袋上袋机构在某些情况下存在一些问题,例如劳动强度大、占用面积过大等问题。因此,本文针对回转式给袋包装机的取袋上袋机构进行了设计与优化,通过建立三维模型进行仿真分析,对最优方案进行了测试验证,为该机构的改进提供了有益的经验和思路。关键词:回转式给袋包装机、取袋上袋机构、设计、优化、仿真分析1.引言给袋包装机作为一种现代化、高

一种给袋式包装机的取袋转位机构.pdf
本发明属于给袋式包装机组件的技术领域,具体是一种给袋式包装机的取袋转位机构,解决了现有技术中给袋式包装机实现取袋转位功能的装置存在刚性差,容易发生偏袋掉袋以及机构复杂,生产成本高且占地面积大的问题,其包括两条传动链以及机架,实现包装袋的转位运动的第一条传动链由电机驱动,是由一个凸轮摇杆和三个四杆机构串联而成的单自由度传动链;实现包装袋的夹取动作的第二条传动链由气缸带动滑块驱动,是一曲柄摇块机构;第二条运动链机构固连在第一条运动链的末端。本发明结构简单,成本低廉,可靠性高并易于控制。

药物袋包装机构.ppt
第四章药物袋包装机构第四章药物袋包装机构§4-1概述1、袋包装工艺2、常用包装袋型3、袋包装机构组成§4-2制袋装置一、成形器形式翻领式成型器:象鼻式成型器:三角形成型器:U形成型器:直角缺口导板式成型器:二、制袋成形器的设计1、翻领式成形器设计理论计算法拼接曲线r、α、β、H值的确定:经验设计法经验设计法续2、三角形成形器的设计三角形成形器的设计续三、制袋装置结构类型立式间歇型制袋包装应用:例二立式三边封口制袋包装机立式连续制袋封口包装应用.卧式间歇直线型制袋联

上袋机械手外撑袋机构.pdf
本发明属于包装机械设备技术领域,涉及一种上袋机械手外撑袋机构,包括形状相同且相互平行设置的上旋转臂、下旋转臂,其中上旋转臂的后端呈V型状,第一夹臂、第二夹臂转动设置于所述上旋转臂、下旋转臂之间前部位置,第一夹臂上一体形成第一齿形部,第二夹臂上一体形成第二齿形部,所述第一齿形部与第二齿形部相互啮合;第二夹臂由上旋转臂与下旋转臂之间的第一气缸驱动进行转动,气缸连接头设置于所述第一夹臂、第二夹臂之间尾部位置,第一气缸后端连接于所述气缸连接头上。本发明产品结构简单紧凑,动作灵活可靠,适合在自动上袋机上使用,对于口
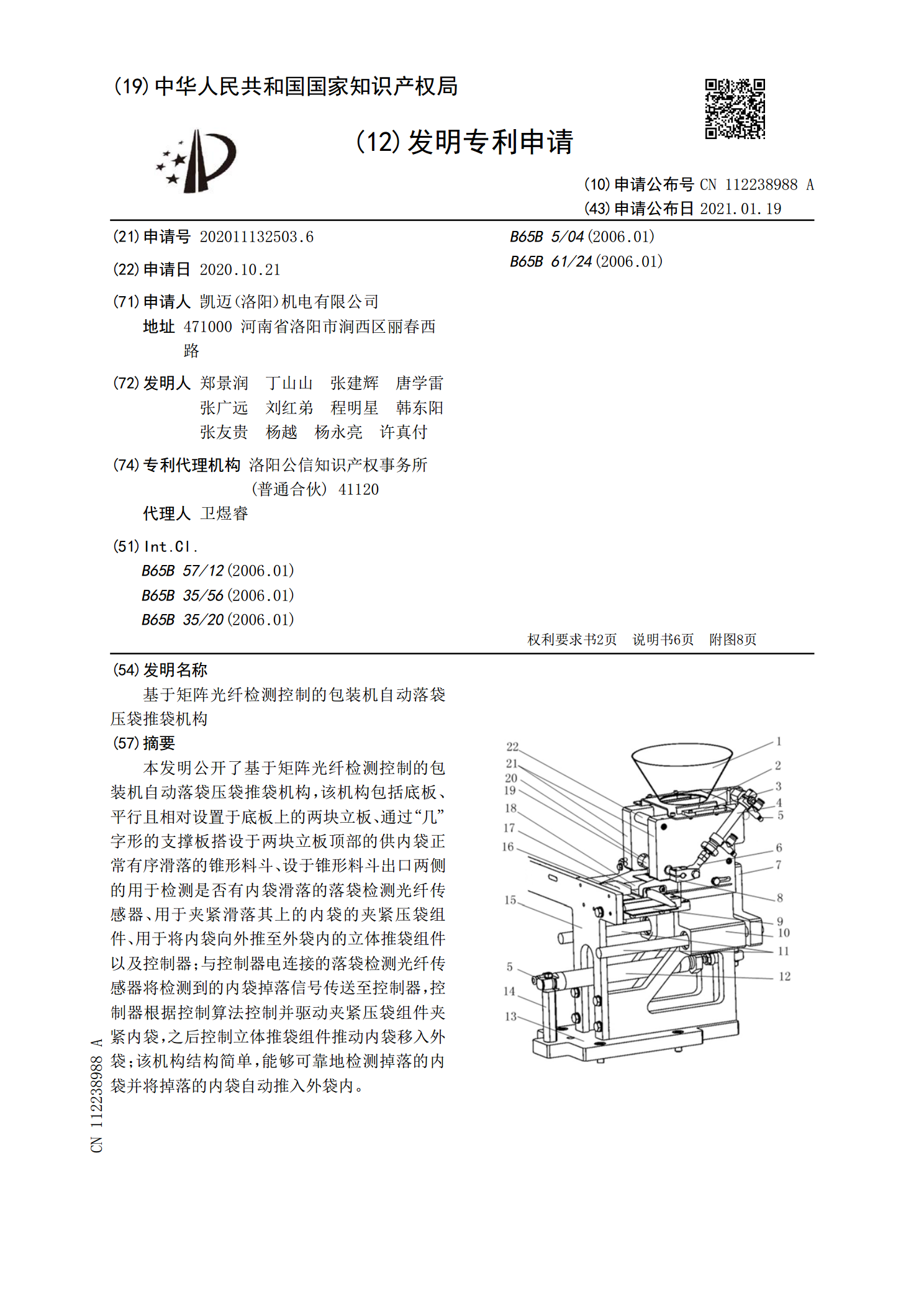
基于矩阵光纤检测控制的包装机自动落袋压袋推袋机构.pdf
本发明公开了基于矩阵光纤检测控制的包装机自动落袋压袋推袋机构,该机构包括底板、平行且相对设置于底板上的两块立板、通过“几”字形的支撑板搭设于两块立板顶部的供内袋正常有序滑落的锥形料斗、设于锥形料斗出口两侧的用于检测是否有内袋滑落的落袋检测光纤传感器、用于夹紧滑落其上的内袋的夹紧压袋组件、用于将内袋向外推至外袋内的立体推袋组件以及控制器;与控制器电连接的落袋检测光纤传感器将检测到的内袋掉落信号传送至控制器,控制器根据控制算法控制并驱动夹紧压袋组件夹紧内袋,之后控制立体推袋组件推动内袋移入外袋;该机构结构简单