
智能夹爪.pdf

雨巷****轶丽


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
智能夹爪.pdf
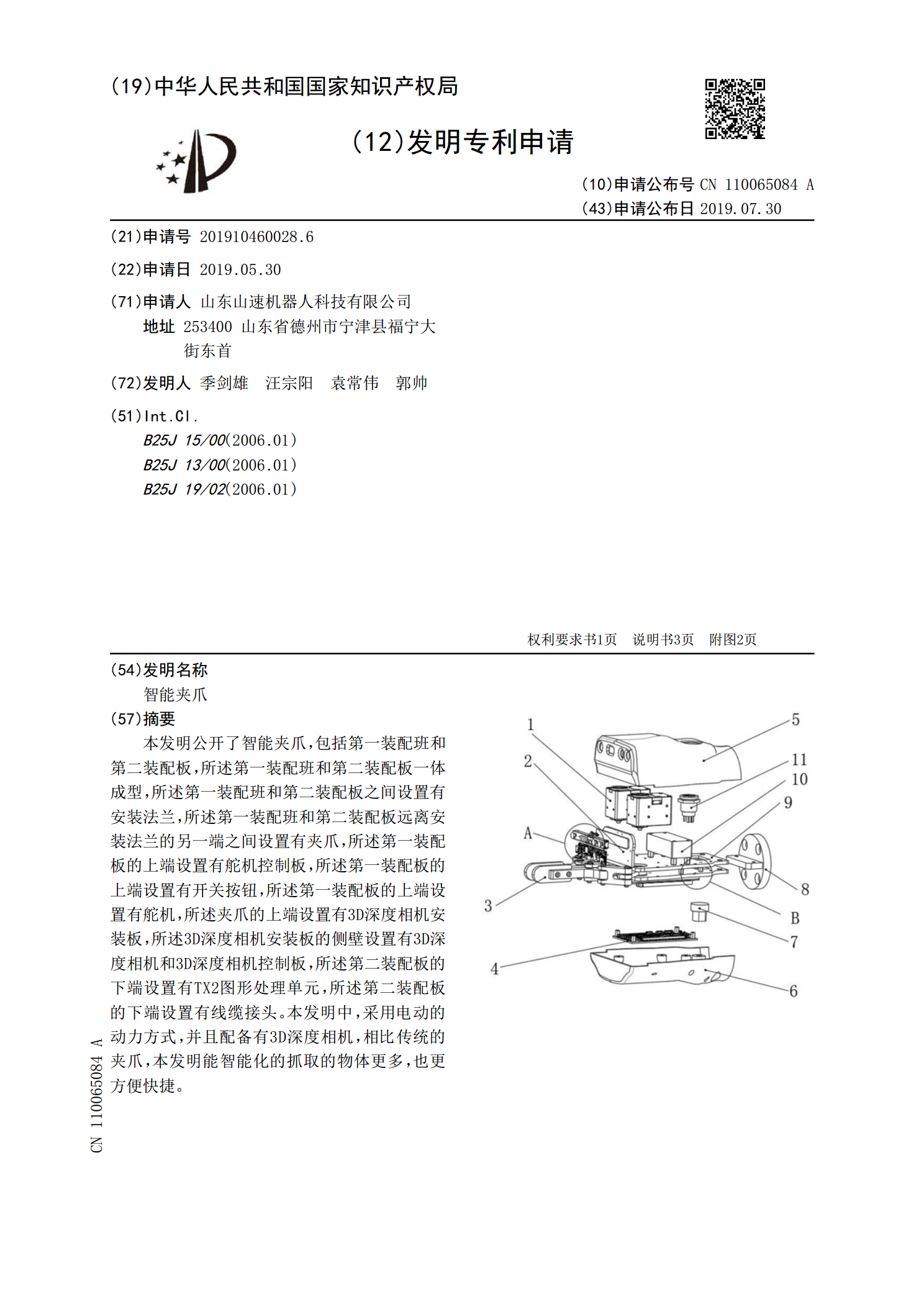
本发明公开了智能夹爪,包括第一装配班和第二装配板,所述第一装配班和第二装配板一体成型,所述第一装配班和第二装配板之间设置有安装法兰,所述第一装配班和第二装配板远离安装法兰的另一端之间设置有夹爪,所述第一装配板的上端设置有舵机控制板,所述第一装配板的上端设置有开关按钮,所述第一装配板的上端设置有舵机,所述夹爪的上端设置有3D深度相机安装板,所述3D深度相机安装板的侧壁设置有3D深度相机和3D深度相机控制板,所述第二装配板的下端设置有TX2图形处理单元,所述第二装配板的下端设置有线缆接头。本发明中,采用电动的
夹爪装置、夹爪模组及驱动装置.pdf
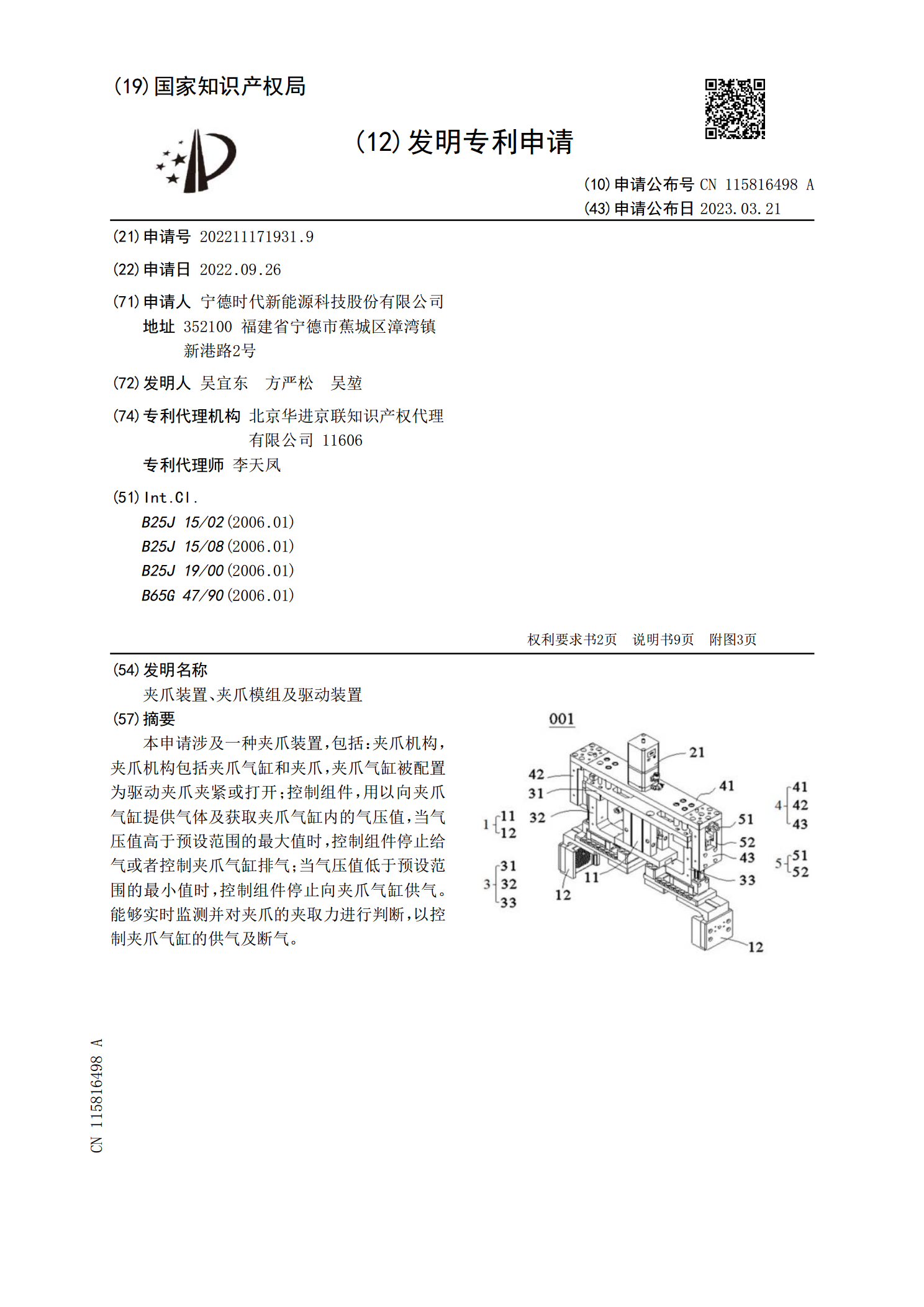
本申请涉及一种夹爪装置,包括:夹爪机构,夹爪机构包括夹爪气缸和夹爪,夹爪气缸被配置为驱动夹爪夹紧或打开;控制组件,用以向夹爪气缸提供气体及获取夹爪气缸内的气压值,当气压值高于预设范围的最大值时,控制组件停止给气或者控制夹爪气缸排气;当气压值低于预设范围的最小值时,控制组件停止向夹爪气缸供气。能够实时监测并对夹爪的夹取力进行判断,以控制夹爪气缸的供气及断气。

夹爪、钻夹头以及制造夹爪的方法.pdf
本发明涉及一种制造用于钻夹头的夹爪的方法,其中由坯件提供销,在销中形成用于与钻夹头上的螺纹相匹配啮合的齿条,以及在销的与齿条相对的一侧上轴向偏移地构成相对于销的轴线倾斜延伸的夹紧面,其中为了改善销的材料特性,至少实施调质、渗碳、渗氮、回火的工艺步骤中的一种,并且其中在夹爪的至少一个区域中接着额外实施硬化。此外,本发明还涉及一种夹爪以及具有这种夹爪的钻夹头。
夹爪驱动机构、夹爪机构以及线束夹爪移载装置.pdf
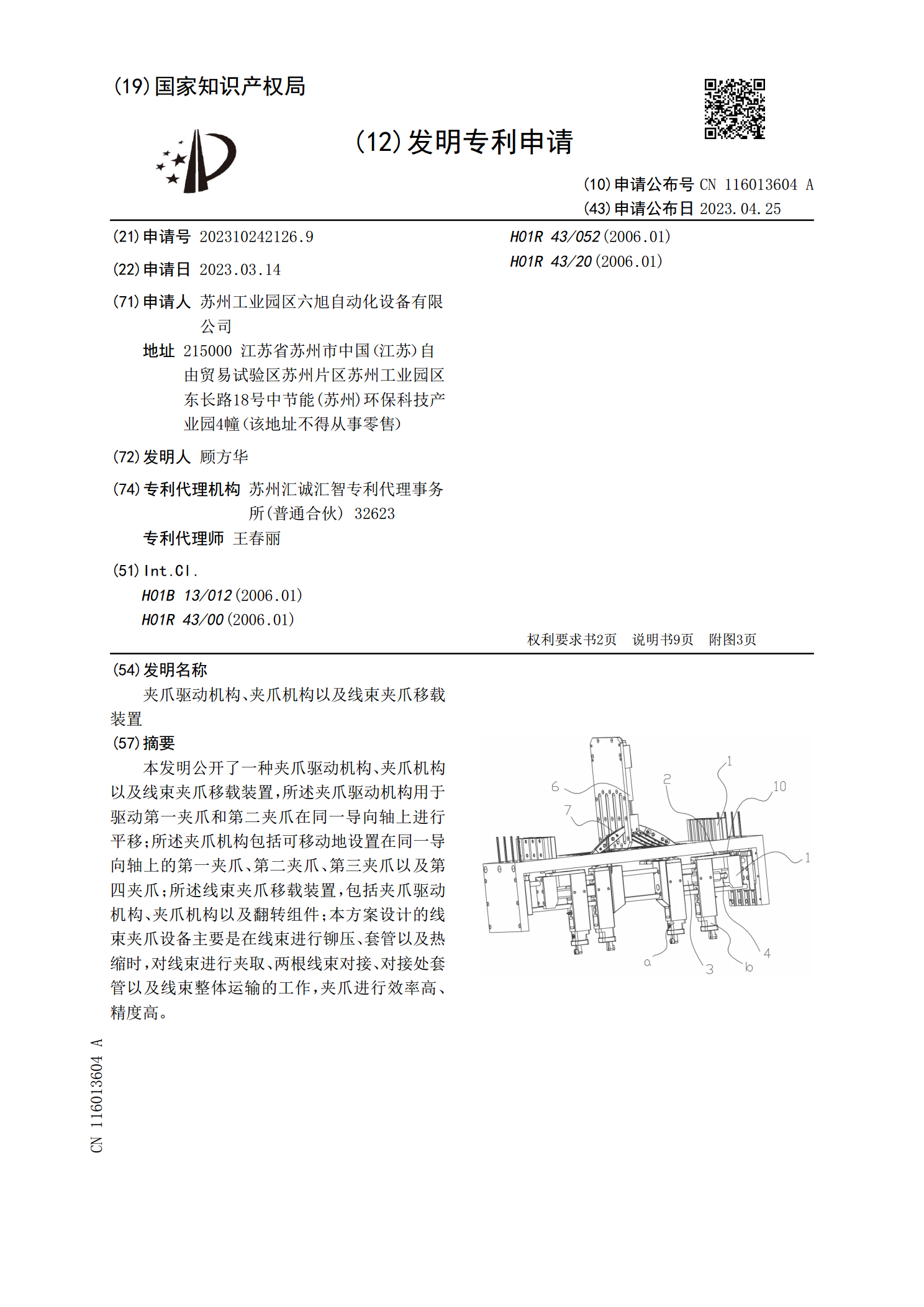
本发明公开了一种夹爪驱动机构、夹爪机构以及线束夹爪移载装置,所述夹爪驱动机构用于驱动第一夹爪和第二夹爪在同一导向轴上进行平移;所述夹爪机构包括可移动地设置在同一导向轴上的第一夹爪、第二夹爪、第三夹爪以及第四夹爪;所述线束夹爪移载装置,包括夹爪驱动机构、夹爪机构以及翻转组件;本方案设计的线束夹爪设备主要是在线束进行铆压、套管以及热缩时,对线束进行夹取、两根线束对接、对接处套管以及线束整体运输的工作,夹爪进行效率高、精度高。

气动夹爪.pdf
本发明提供了一种气动夹爪,包括安装座以及安装于安装座上的壳体,壳体内设置有相互连通的第一腔体和第二腔体,第一腔体内滑动的安装有两夹爪组件,第二腔体内安装有活塞组件,活塞组件的一端凸伸出第一腔体内并位于两夹爪组件之间,活塞组件动作以带动两夹爪组件相互靠近或相互远离;第一腔体内设置有第一齿形部,夹爪组件上均设置有与第一齿形部啮合的第二齿形部,借由第一齿形部与第二齿形部的啮合以加固两夹爪组件与壳体的连接。本发明的气动夹爪,安装空间小夹持量大,且能够保持较长时间对物品的夹持,还能撑开于孔状物体内以拾取物品,适用范