
一种基于机器视觉的玻璃定位检测装置.pdf

猫巷****盟主


1/10
2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的玻璃定位检测装置.pdf
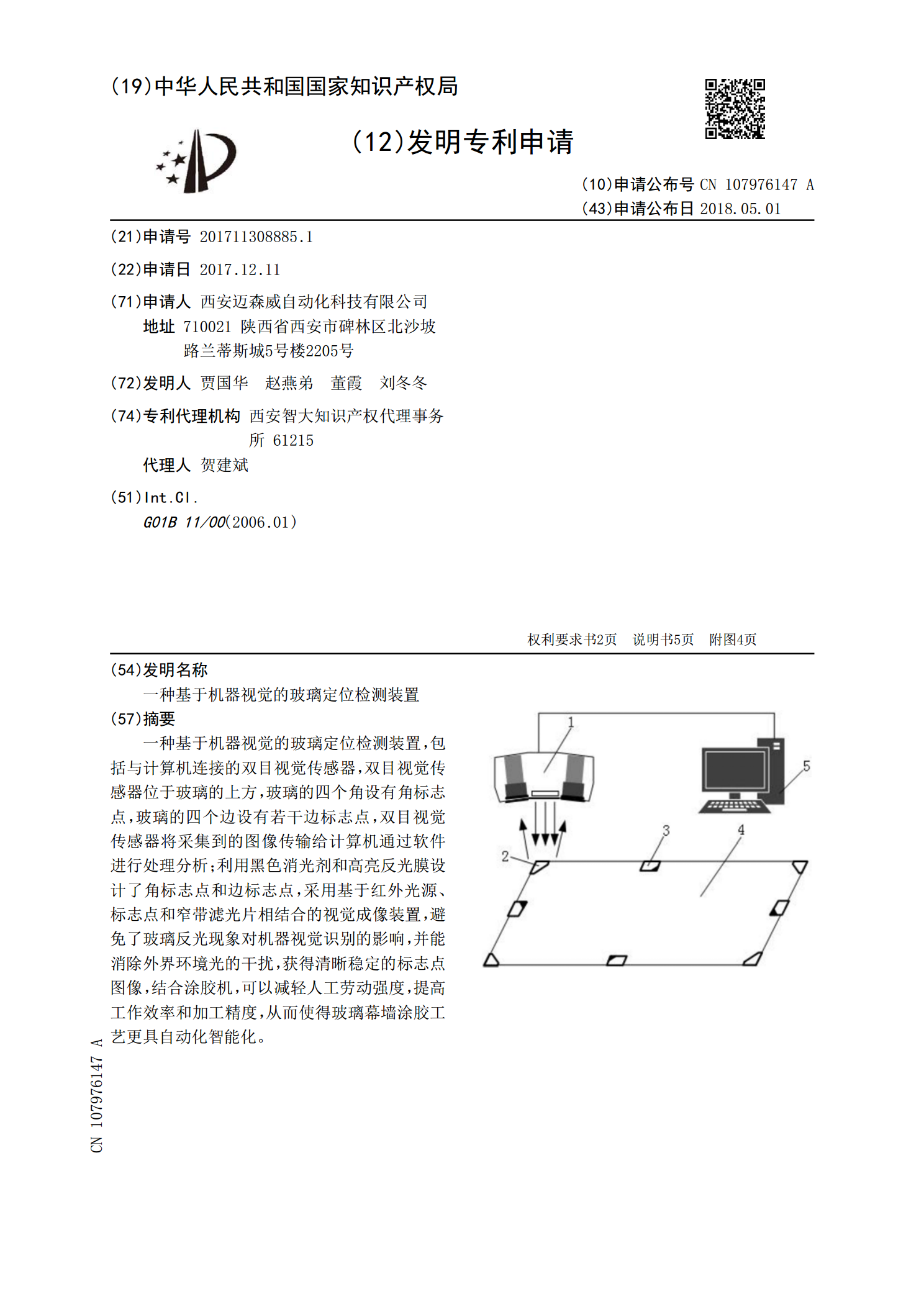
一种基于机器视觉的玻璃定位检测装置,包括与计算机连接的双目视觉传感器,双目视觉传感器位于玻璃的上方,玻璃的四个角设有角标志点,玻璃的四个边设有若干边标志点,双目视觉传感器将采集到的图像传输给计算机通过软件进行处理分析;利用黑色消光剂和高亮反光膜设计了角标志点和边标志点,采用基于红外光源、标志点和窄带滤光片相结合的视觉成像装置,避免了玻璃反光现象对机器视觉识别的影响,并能消除外界环境光的干扰,获得清晰稳定的标志点图像,结合涂胶机,可以减轻人工劳动强度,提高工作效率和加工精度,从而使得玻璃幕墙涂胶工艺更具自动
一种基于机器视觉的定位装置.pdf
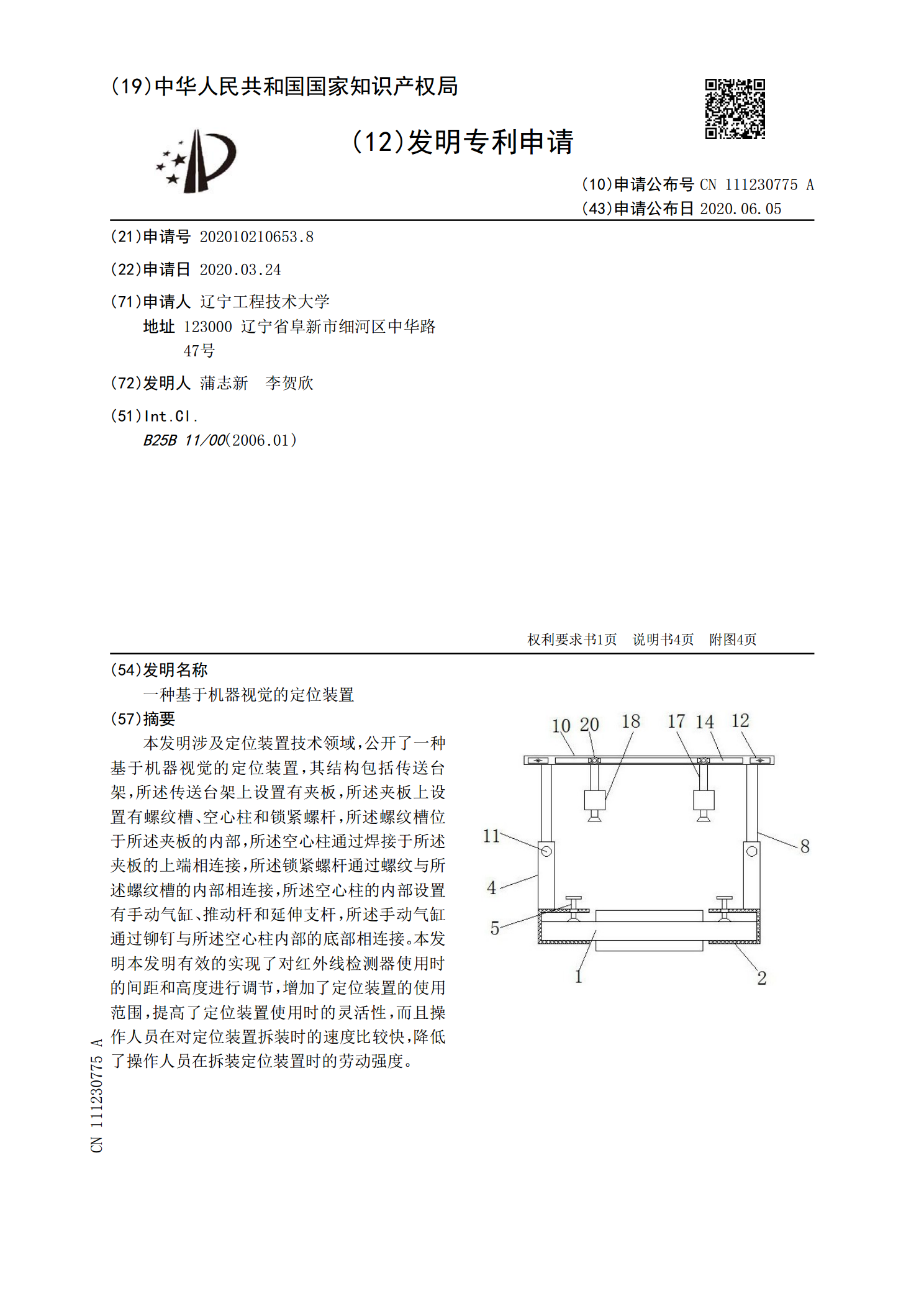
本发明涉及定位装置技术领域,公开了一种基于机器视觉的定位装置,其结构包括传送台架,所述传送台架上设置有夹板,所述夹板上设置有螺纹槽、空心柱和锁紧螺杆,所述螺纹槽位于所述夹板的内部,所述空心柱通过焊接于所述夹板的上端相连接,所述锁紧螺杆通过螺纹与所述螺纹槽的内部相连接,所述空心柱的内部设置有手动气缸、推动杆和延伸支杆,所述手动气缸通过铆钉与所述空心柱内部的底部相连接。本发明本发明有效的实现了对红外线检测器使用时的间距和高度进行调节,增加了定位装置的使用范围,提高了定位装置使用时的灵活性,而且操作人员在对定位

一种基于机器视觉的定位装置.pdf
本发明公开了一种基于机器视觉的定位装置,其技术方案要点是:包括底板,所述底板的顶部开设有凹槽,所述凹槽的内部设有传输带,所述底板上设有用于转动传输带的驱动结构,所述底板的顶部固定连接有架体,若物料之间的间距过大时,工作人员可通过转动结构转动滚轮,使得滚轮接触物料,滚轮在转动时能够使得物料在传输带上平移,可以夹块物料的传输速度,以此达到了减少两个物料之间的间距,若物料之间的间距过小时,工作人员可通过转动结构反向转动滚轮,滚轮与物料接触后,能够让物料向传输带传输方向的反方向移动,以此可以达到增大物料之间的距离
一种基于机器视觉的定位装置.pdf
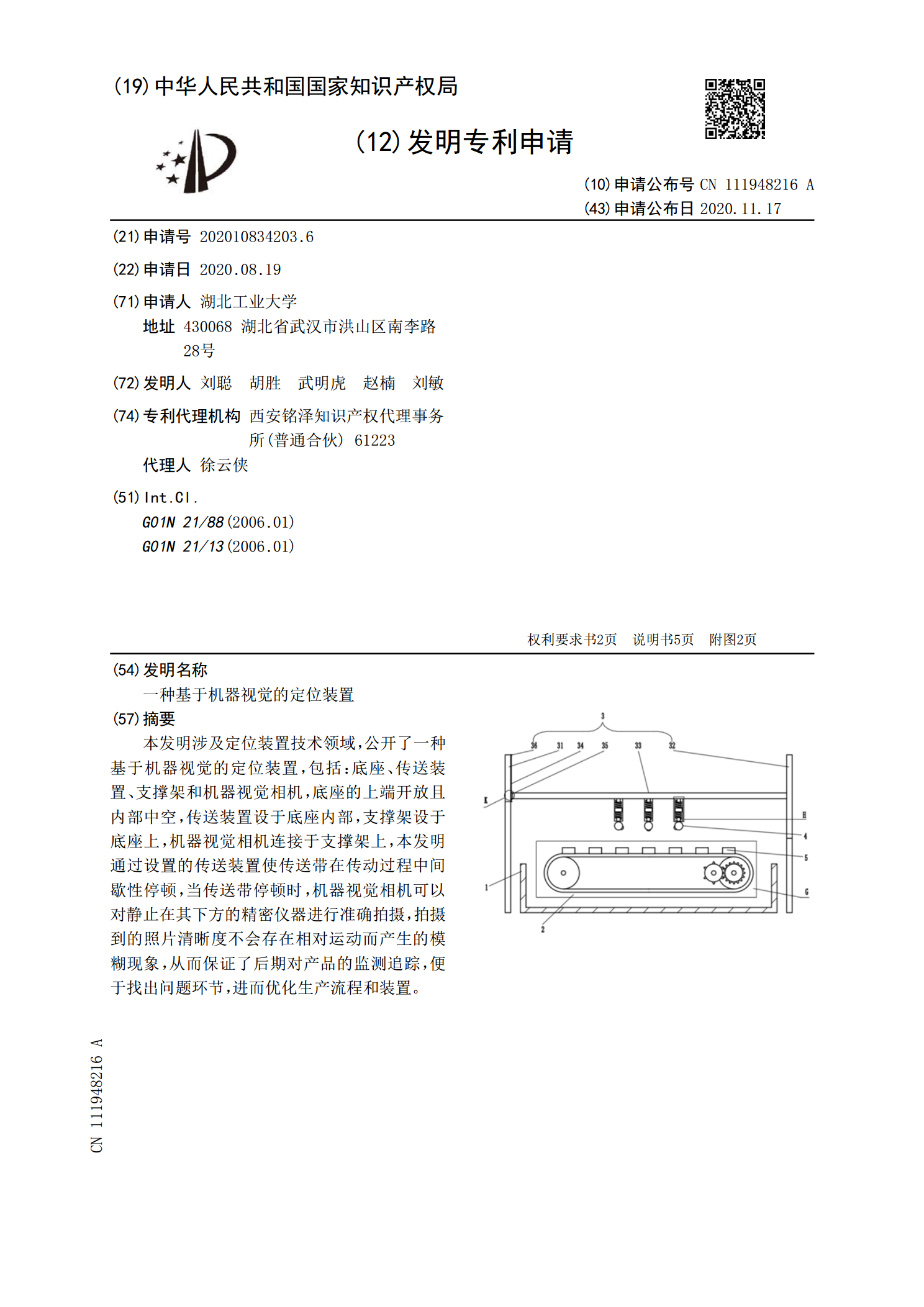
本发明涉及定位装置技术领域,公开了一种基于机器视觉的定位装置,包括:底座、传送装置、支撑架和机器视觉相机,底座的上端开放且内部中空,传送装置设于底座内部,支撑架设于底座上,机器视觉相机连接于支撑架上,本发明通过设置的传送装置使传送带在传动过程中间歇性停顿,当传送带停顿时,机器视觉相机可以对静止在其下方的精密仪器进行准确拍摄,拍摄到的照片清晰度不会存在相对运动而产生的模糊现象,从而保证了后期对产品的监测追踪,便于找出问题环节,进而优化生产流程和装置。

一种基于机器视觉检测的自动定位对焦检测装置.pdf
本发明公开了一种基于机器视觉检测的自动定位对焦检测装置,包括主体,固定件,移动座,调节件,检测件,防护罩和清洁件;主体为板状结构,且主体的顶端设有分隔板;固定件的两端安装在调节槽的内部,且固定件外侧的插板插入在调节槽的外侧,并且插板内侧的受力杆通过弹簧安装在受力槽的内部;调节件安装在主体的后端中间位置,且调节件的插入件上下两端插入在拉槽的内部;防护罩的顶端侧边安装有正反转电机。本发明的移动座可以通过移动杆接收传动头传来的动力,两个移动座根据需求同时安装调节,可以使单个调节件就可以控制两个移动座进行位置调节