
一种基于机器视觉的工件定位方法及装置.pdf

小沛****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于机器视觉的工件定位方法及装置.pdf
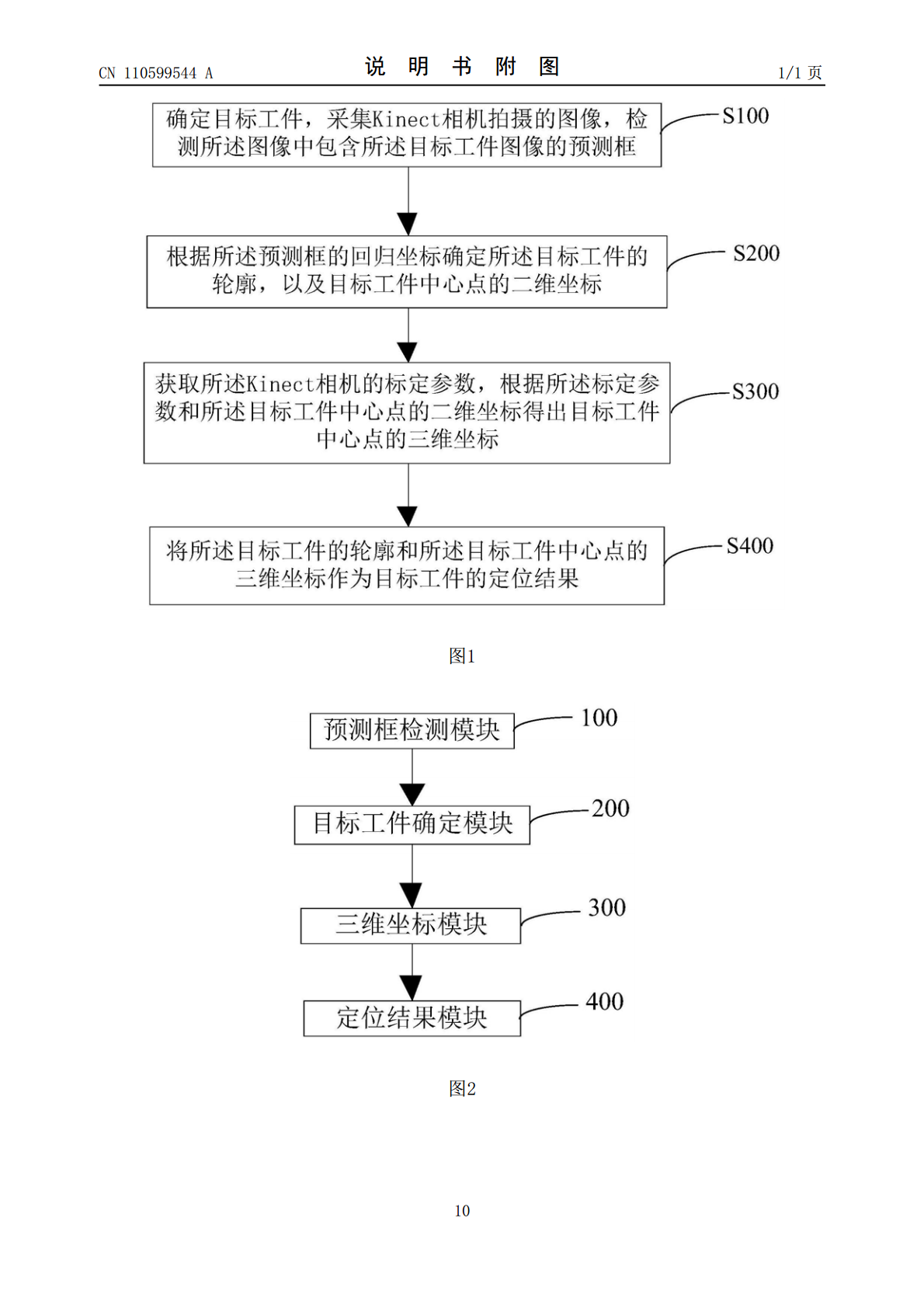
本发明涉及智能机器人技术领域,具体涉及一种基于机器视觉的工件定位方法及装置,首先确定目标工件,采集Kinect相机拍摄的图像,检测所述图像中包含所述目标工件图像的预测框;进而根据所述预测框的回归坐标确定所述目标工件的轮廓,以及目标工件中心点的二维坐标;接着获取所述Kinect相机的标定参数,根据所述标定参数和所述目标工件中心点的二维坐标得出目标工件中心点的三维坐标;最后将所述目标工件的轮廓和所述目标工件中心点的三维坐标作为目标工件的定位结果,本发明可以对工件进行准确的识别与定位。
一种基于机器视觉的工件定位与识别方法.pdf
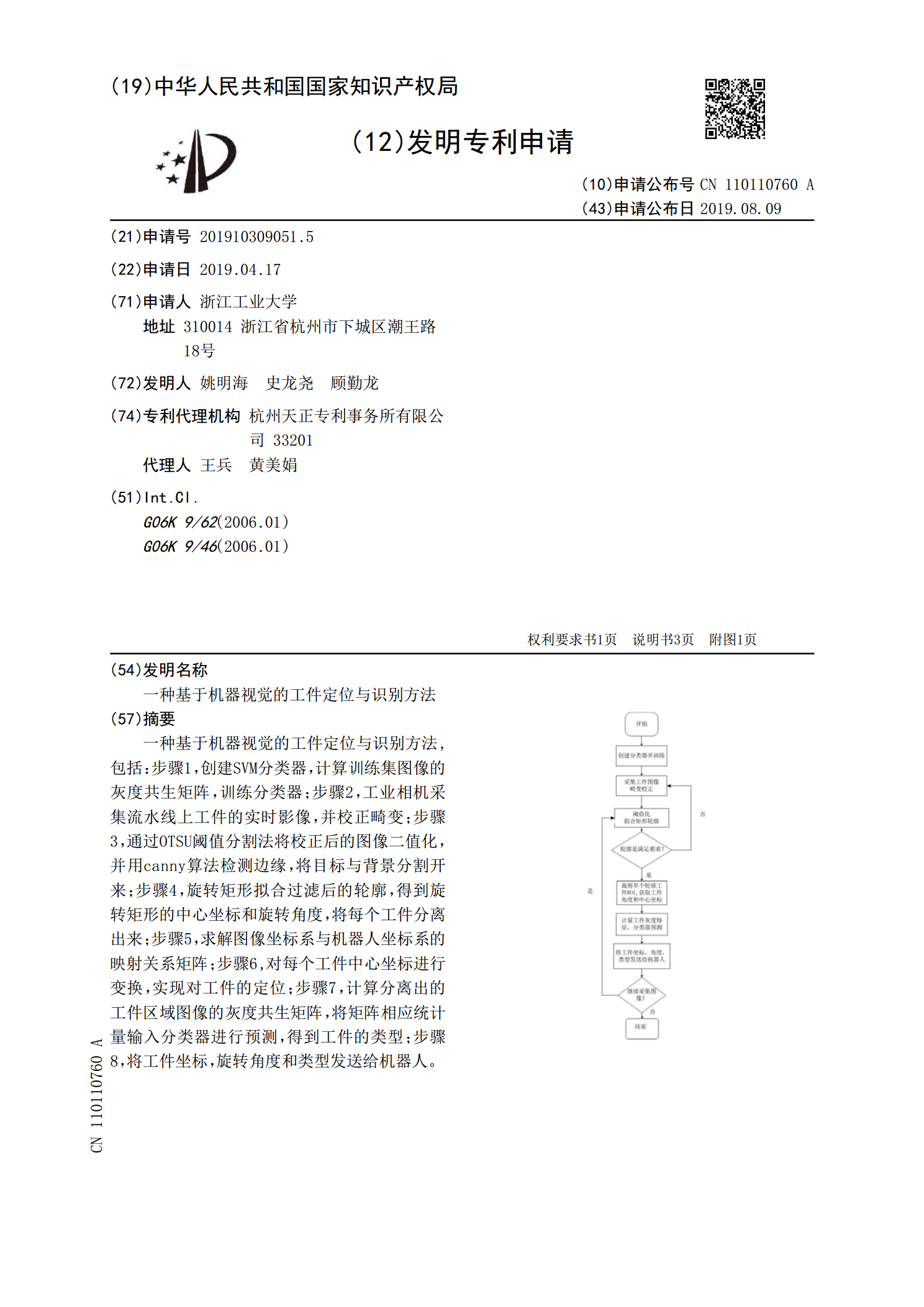
一种基于机器视觉的工件定位与识别方法,包括:步骤1,创建SVM分类器,计算训练集图像的灰度共生矩阵,训练分类器;步骤2,工业相机采集流水线上工件的实时影像,并校正畸变;步骤3,通过OTSU阈值分割法将校正后的图像二值化,并用canny算法检测边缘,将目标与背景分割开来;步骤4,旋转矩形拟合过滤后的轮廓,得到旋转矩形的中心坐标和旋转角度,将每个工件分离出来;步骤5,求解图像坐标系与机器人坐标系的映射关系矩阵;步骤6,对每个工件中心坐标进行变换,实现对工件的定位;步骤7,计算分离出的工件区域图像的灰度共生矩阵

基于机器视觉的工件识别与定位算法.docx
基于机器视觉的工件识别与定位算法标题:基于机器视觉的工件识别与定位算法摘要:随着工业自动化的发展,工件识别与定位在工业生产中扮演了重要角色。本文基于机器视觉技术,对工件识别与定位算法进行探讨。首先,介绍了机器视觉的基本原理和常用技术。然后,从图像预处理、特征提取和分类识别三个方面,详细分析了工件识别的方法和算法。接着,介绍了工件定位的基本原理和方法,并结合实际案例,分析了不同算法的优缺点。最后,讨论了目前存在的问题和未来的发展方向。关键词:机器视觉、工件识别、工件定位、图像预处理、特征提取、分类识别1.引

基于机器视觉的工件的识别和定位.docx
基于机器视觉的工件的识别和定位摘要本文首先介绍了机器视觉技术的基础概念和几个重要的应用之一:工件识别和定位。我们针对这一应用,探讨了常见的方法和技术,如颜色分割、边缘检测、特征提取等等,并比较了它们的优劣。我们认为,基于深度学习的方法是当前最先进的方法。接着,我们介绍了基于深度学习的工件识别和定位方法,主要包括卷积神经网络、区域提议网络、密集预测等等。我们详细探讨了这些方法的原理和流程,并举例说明了它们的效果。最后,我们总结了目前存在的问题和挑战,并对未来的发展方向进行了展望。关键词:机器视觉;工件识别;
一种基于视觉定位的工业机器人工件抓取实现方法.pdf
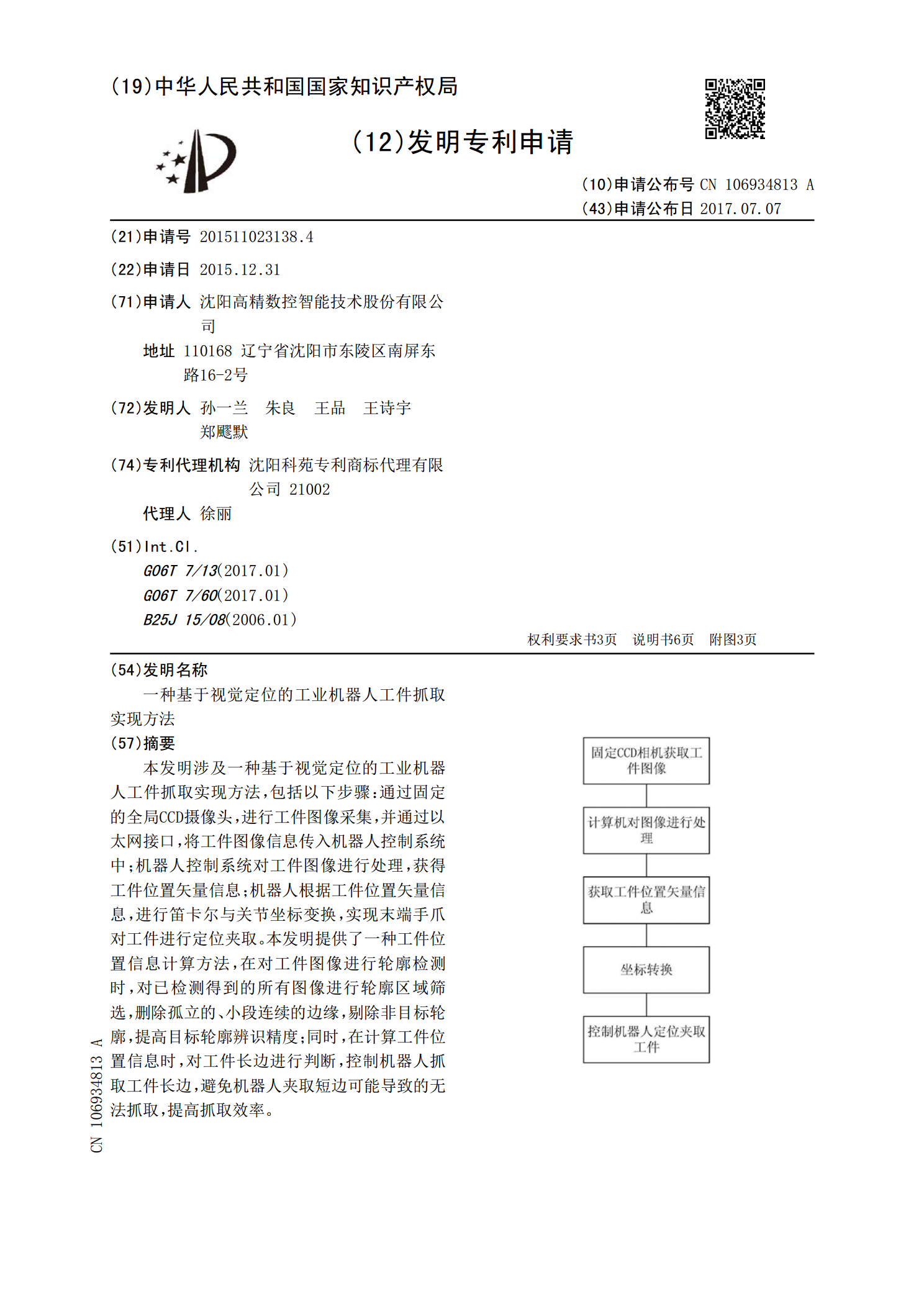
本发明涉及一种基于视觉定位的工业机器人工件抓取实现方法,包括以下步骤:通过固定的全局CCD摄像头,进行工件图像采集,并通过以太网接口,将工件图像信息传入机器人控制系统中;机器人控制系统对工件图像进行处理,获得工件位置矢量信息;机器人根据工件位置矢量信息,进行笛卡尔与关节坐标变换,实现末端手爪对工件进行定位夹取。本发明提供了一种工件位置信息计算方法,在对工件图像进行轮廓检测时,对已检测得到的所有图像进行轮廓区域筛选,删除孤立的、小段连续的边缘,剔除非目标轮廓,提高目标轮廓辨识精度;同时,在计算工件位置信息时