
一种基于机器视觉的指针式仪表定位与识别方法.pdf

努力****爱静


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于机器视觉的指针式仪表定位与识别方法.pdf
本发明公开了一种基于机器视觉的指针式仪表定位与识别方法,对仪表盘在仪表柜图像中的位置进行准确定位并自动识别仪表读数,(1)获取仪表柜图像;(2)将仪表柜图像进行分割处理,得出仪表盘图像;(3)对仪表盘图像进行预处理;(4)使用Canny边缘检测法获得仪表盘图像中所有的边缘轮廓;(5)在获得的边缘轮廓中用Hough变换找到所有直线轮廓,(6)通过直线轮廓的长度特征筛选出仪表盘中指针所在的直线轮廓;(7)计算指针所在两条直线轮廓倾斜角的平均值θ;(7)由直线倾角和仪表刻度之间的线性关系计算出指针读数。通过采用

一种基于机器视觉的指针式仪表识别方法.pdf
本发明提供一种基于机器视觉的指针式仪表识别方法,包括:1)原始图像采集并上传;2)对图像信息进行预处理得到二值化图像;3)刻度轮廓的提取,刻度圆拟合与展开,得到特殊点位置;4)提取指针,获得指针轮廓;5)指针细化;6)确定基准点;7)拟合指针直线段;8)读数读取;9)设计仪表数据的数据库表。本发明利用机器视觉技术替代人工读取指针式仪表的示数读取,通过对仪表图像的一系列图像处理和计算,较为准确的读取仪表的示数,实现仪表示数读取的自动化,具有准确率高,效率高,以及普适的特点。

基于机器视觉的机械指针式仪表的读数识别方法.docx
基于机器视觉的机械指针式仪表的读数识别方法基于机器视觉的机械指针式仪表的读数识别方法摘要:机器视觉技术在各个领域中得到了广泛的应用,其中包括对机械指针式仪表的读数识别。本文提出了一种基于机器视觉的机械指针式仪表的读数识别方法。该方法通过图像采集、图像预处理、指针检测和读数计算四个步骤实现了对机械指针式仪表的自动读取。实验结果表明,该方法具有较高的准确性和稳定性,可以满足实际应用的需求。关键词:机器视觉;机械指针式仪表;读数识别1.引言机械指针式仪表作为一种常见的测量工具,广泛应用于各个领域中。然而,由于读

指针式仪表读数的机器视觉智能识别方法.docx
指针式仪表读数的机器视觉智能识别方法指针式仪表是一种常见的测量工具,广泛应用于各种行业中。传统上,读取指针式仪表的读数需要由人工来完成,但这种方法存在一些问题,如读数精度受人的主观误差影响,且速度较慢。随着机器视觉和智能识别技术的发展,利用计算机视觉技术对指针式仪表的读数进行智能识别已成为研究的热点之一。本文将介绍一种基于机器视觉的智能识别方法,以提高指针式仪表读数的准确性和效率。该方法主要分为三个步骤:图像预处理、特征提取和读数识别。首先,对于输入的仪表图像,需要进行图像预处理。首先,将彩色图像转换为灰
一种基于机器视觉的工件定位与识别方法.pdf
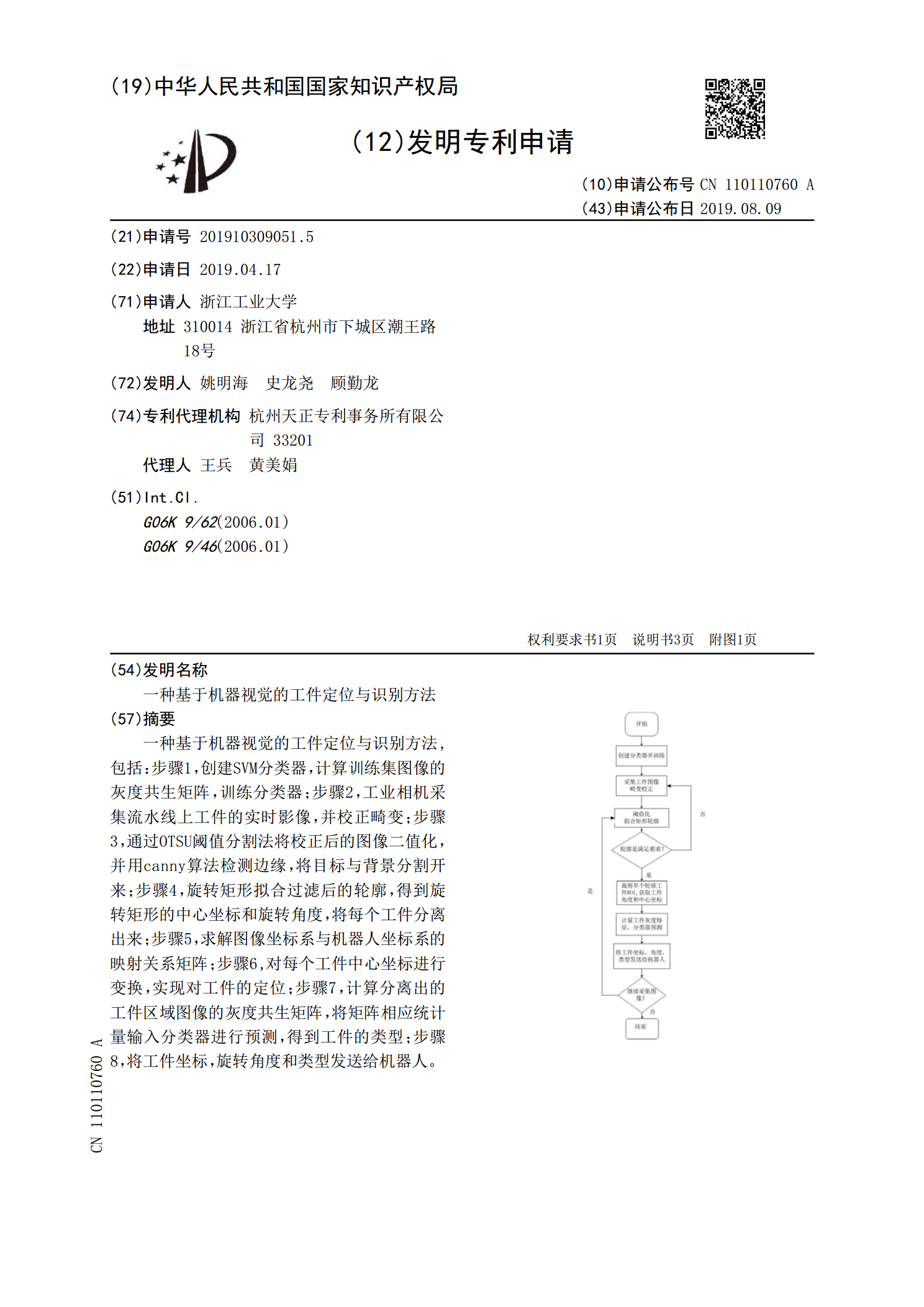
一种基于机器视觉的工件定位与识别方法,包括:步骤1,创建SVM分类器,计算训练集图像的灰度共生矩阵,训练分类器;步骤2,工业相机采集流水线上工件的实时影像,并校正畸变;步骤3,通过OTSU阈值分割法将校正后的图像二值化,并用canny算法检测边缘,将目标与背景分割开来;步骤4,旋转矩形拟合过滤后的轮廓,得到旋转矩形的中心坐标和旋转角度,将每个工件分离出来;步骤5,求解图像坐标系与机器人坐标系的映射关系矩阵;步骤6,对每个工件中心坐标进行变换,实现对工件的定位;步骤7,计算分离出的工件区域图像的灰度共生矩阵