
车路协同路侧感知融合方法的研究.docx

豆柴****作者


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车路协同路侧感知融合方法的研究.docx
车路协同路侧感知融合方法的研究I.研究背景和意义车路协同是未来交通系统的重要发展方向,它通过实时信息交流和数据共享,实现车辆、道路和交通控制设施之间的高效协同。在这个过程中,路侧感知融合技术起着至关重要的作用。它能够有效地提高车辆的行驶安全性、减少拥堵现象、提高道路通行能力,从而为人们带来更加便捷、舒适的出行体验。本研究的意义不仅在于提高车路协同的技术水平,更在于为广大市民带来实实在在的出行便利。想象一下当你驾驶汽车在路上行驶时,不再需要担心交通事故的发生,因为你的车辆能够实时感知周围环境,与其他车辆和交
一种车路协同路侧感知设备.pdf
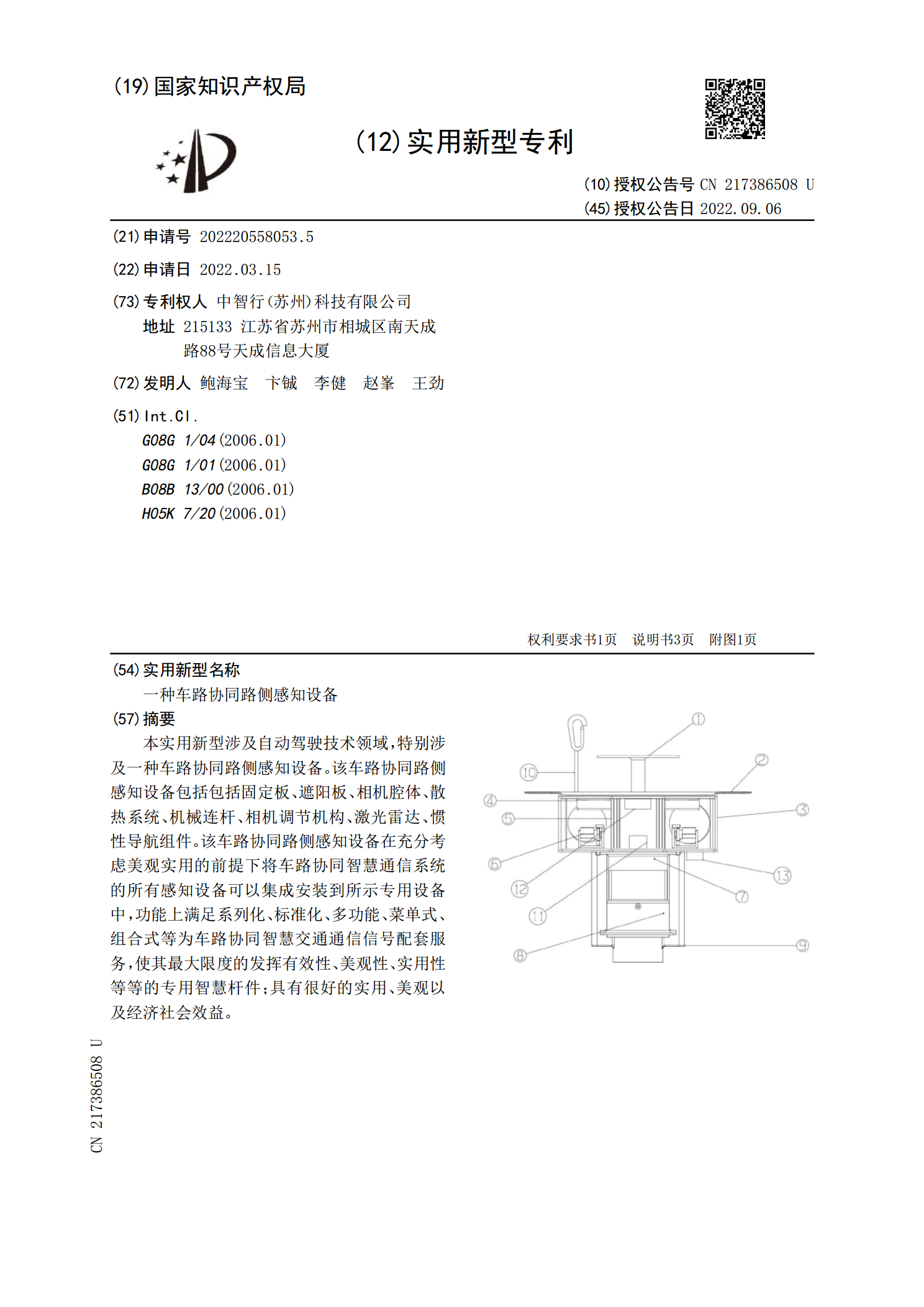
本实用新型涉及自动驾驶技术领域,特别涉及一种车路协同路侧感知设备。该车路协同路侧感知设备包括包括固定板、遮阳板、相机腔体、散热系统、机械连杆、相机调节机构、激光雷达、惯性导航组件。该车路协同路侧感知设备在充分考虑美观实用的前提下将车路协同智慧通信系统的所有感知设备可以集成安装到所示专用设备中,功能上满足系列化、标准化、多功能、菜单式、组合式等为车路协同智慧交通通信信号配套服务,使其最大限度的发挥有效性、美观性、实用性等等的专用智慧杆件;具有很好的实用、美观以及经济社会效益。
一种基于车路协同的路侧感知融合系统及优化方法.pdf
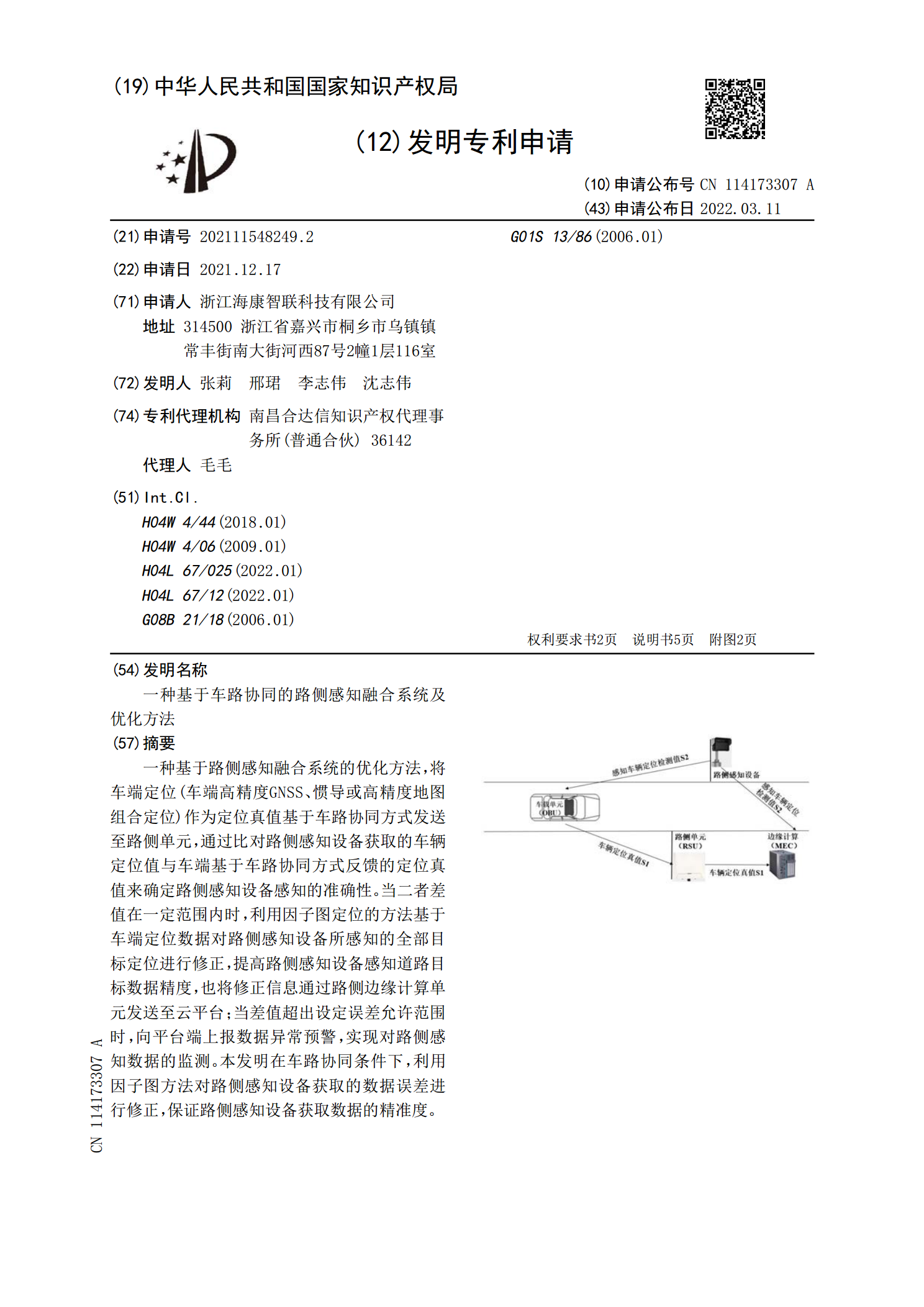
一种基于路侧感知融合系统的优化方法,将车端定位(车端高精度GNSS、惯导或高精度地图组合定位)作为定位真值基于车路协同方式发送至路侧单元,通过比对路侧感知设备获取的车辆定位值与车端基于车路协同方式反馈的定位真值来确定路侧感知设备感知的准确性。当二者差值在一定范围内时,利用因子图定位的方法基于车端定位数据对路侧感知设备所感知的全部目标定位进行修正,提高路侧感知设备感知道路目标数据精度,也将修正信息通过路侧边缘计算单元发送至云平台;当差值超出设定误差允许范围时,向平台端上报数据异常预警,实现对路侧感知数据的监

车路协同系统路侧感知与车端感知实时匹配的方法及系统.pdf
本发明涉及一种车路协同系统路侧感知与车端感知实时匹配方法,该方法包括以下步骤:步骤1:通过路端传感器采集道路原始数据并传输至路端计算单元;步骤2:路端计算单元处理道路原始数据并得到路端感知融合数据后传输至路端RSU;步骤3:路端RSU将路端感知融合数据转换为标准感知共享数据后进行广播;步骤4:车端OBU接收路端RSU广播的标准感知共享数据,并将其转换为路端感知融合数据传输至车端计算单元;步骤5:车端计算单元同时接收车端的传感器原始数据和路端感知融合数据后进行实时目标匹配,与现有技术相比,本发明具有能够实时
基于事件重要度的车路协同路侧设备信息发布方法.pdf
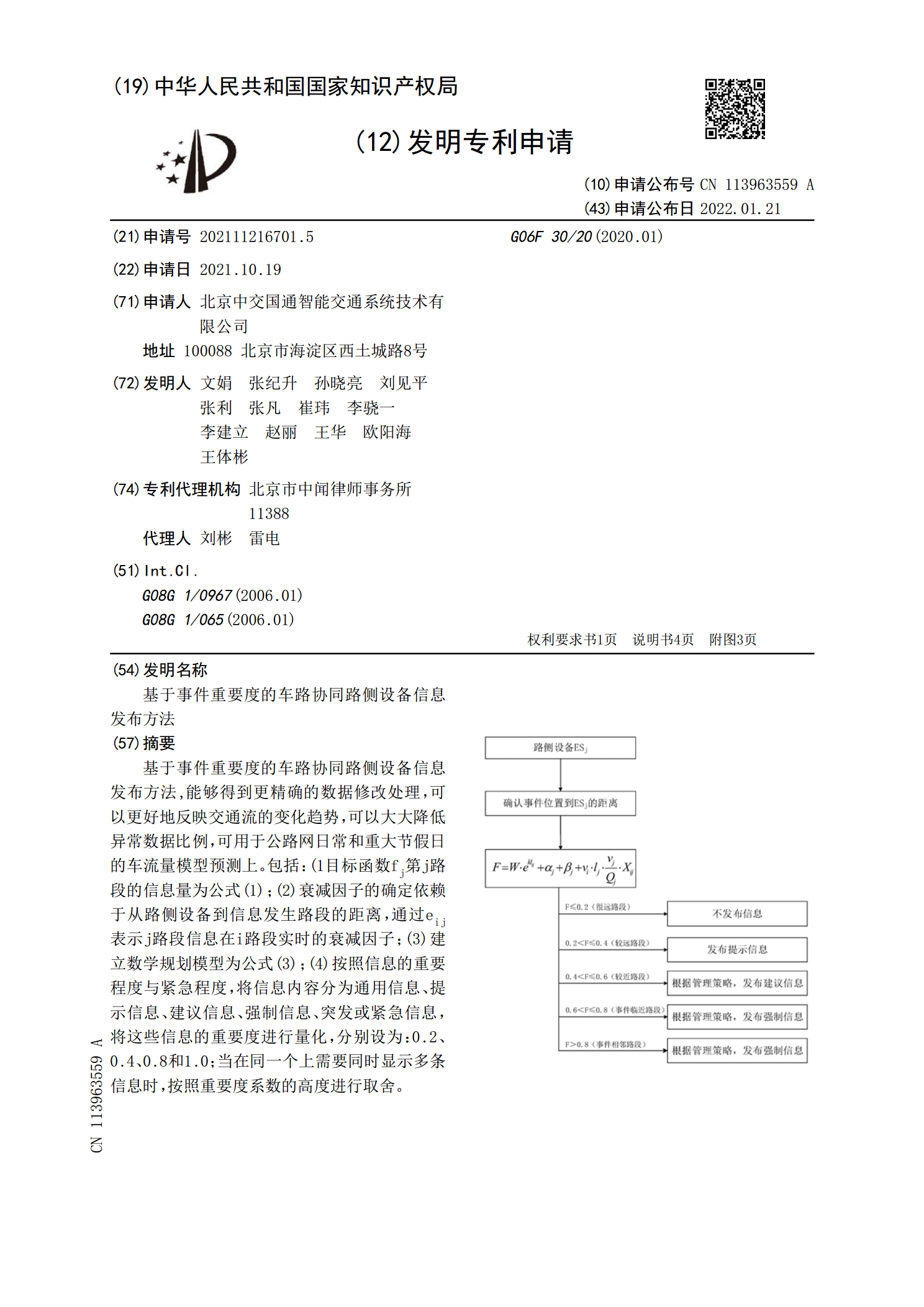
基于事件重要度的车路协同路侧设备信息发布方法,能够得到更精确的数据修改处理,可以更好地反映交通流的变化趋势,可以大大降低异常数据比例,可用于公路网日常和重大节假日的车流量模型预测上。包括:(1目标函数f